基于Ray Tracing的数字植株冠层光照分布研究
2019-12-21胡少军张志毅
张 晶,师 翊,胡少军,张志毅,刘 斌,耿 楠
(西北农林科技大学 a.信息工程学院;b.机械与电子工程学院,陕西 杨凌 712100)
0 引言
合理有效地利用光能、优化植物冠层内的光照分布,对植株和作物生长发育以及产量品质的形成具有重要的意义[1],基于三维点云的重建是植物形态建模的重要方法之一[2]。
目前,在点云获取方面,FastSCANTM探笔系统[3]可对植株从任意角度扫描,可避免叶片间遮挡问题;另外,两种大型激光扫描仪莱卡ScanStation2[4]和Trimble TX5[5]扫描到的整体植株,叶片间会有遮挡,上述三维激光扫描仪价格昂贵,不宜推广使用。微软公司开发的Kinect系统在点云数据获取方面能够获取场景深度信息,有效深度范围0.5~4.5m,数据精度可达0.02mm,且价格低廉[6]。
在光照分布计算方面,文献[5]提出了基于三维点云颜色特征的苹果树冠层光照分布方法,构建了以颜色特征为输入、相对光照强度为输出的模糊神经网络光照分布预测模型。Zhang et al.[7]通过比尔定律整合了冠层结构模型(包括叶曲线动态,小麦冠层的空间形态和叶层参数模型)。Widlowski et al[8]将3D树木冠层反射模型进行简化抽象,计算了BRDF以及BTDF模型和实际光谱模型之间的偏差。黄帆等人[9]以烟草冠层为例,改进了蒙特卡罗光线跟踪模型[10],获得冠层中任意位置的截光率,进而定量分析了各参数对模拟结果的影响。上述提及的方法中,理论和参数复杂,计算量较大,难以普遍应用。侯璨等人[11]提出了基于CUDA的并行辐射度方法[12],但只考虑了光源对植物冠层的能量辐射,没有计算冠层间的辐射能量传递。Tang et al.[13]通过光线跟踪技术动态研究了桃树叶片的光合有效辐射(PAR),不足之处是桃树模型未根据实物建模,每个叶片具有相同的拓扑结构,因此不符合真实桃树的形态特征。
针对上述问题,本文根据Kinect 2.0获取植株点云,研究植株冠层光照模型计算方法。通过光线跟踪算法模拟不同光源位置和不同亮度参数变化下,对重建后的植株网格模型进行光照截获,由初级光线和次级光线迭代照射植株冠层生成累计光强图像,通过图像亮度空间估计光强,最后以实测光强验证计算模型的有效性。
本文选取广东万年青和豆瓣绿两种盆栽植株作为研究对象。广东万年青(学名:Aglaonema Modestum),多年生常绿草本,茎直立或上升,高40~70cm,鳞叶草质;豆瓣绿(学名:Peperomia Tetraphylla (Forst. f.) Hook. et Arn.),多年生肉质丛生草本,多分枝,长10~30cm,叶密集,大小近相等。因其四季常青,冠层特征较为明显,盆栽可移动,有利于进行点云获取和光照分布的研究,可为室外经济型作物(如苹果树、桃树)的研究奠定基础。
1 植株三维点云获取及预处理
由于原始点云以多视角采集,包含噪声且无序,因此需要对点云进行必要的预处理,主要包括点云去噪、配准与分割、重建与精简,为后续植物光照模型计算提供输入数据。
1.1 点云获取
为获取植株的完整点云数据,本文采用Kinect 2.0获取植株两个对立面的三维点云,采集环境为白天室内环境。环境和设备等因素使得数据点存在噪声和离群点,根据Kinect 2.0线结构光扫描特点,利用直通滤波器[14]快速剪除噪声和离群点。根据原始点云的无序性,将叶片点云拟合为曲面,以曲率特征作为特征点完成配准[15]。
1.2 点云重建
针对植株点云复杂的拓扑结构以及叶片间的遮挡问题,本文采用CloudCompare 2.6.1点云分割工具交互式地分割出13片阔叶和6簇枝叶,该工具简单高效,并且开源。三维重建算法中,体绘制运算量大,且要求高性能的计算机,因此本文采用面绘制中原理简单且容易实现的Marching Cubes算法[16]。在三维离散数据场中通过线性插值来逼近等值面分别对分割后的植株点云进行重建,并对重建后的模型进行光顺[17]、简化[18]和填洞处理[19]。图1给出了点云预处理中获取、配准、分割及重建的过程。

(a) 广东万年青盆栽实物图 (b) 点云数据 (c) 分割后点云 (d) 网格模型

(e) 豆瓣绿盆栽实物图 (f) 点云数据 (g) 分割后点云 (h) 网格模型图1 盆栽植物实物图、点云和网格数据Fig.1 Photographs、point clouds and meshes of potted plants
经预处理的点云数据为后续光照模型研究提供了输入数据,在此基础上,对植株模型的光照分布展开研究,计算步骤如图2所示。
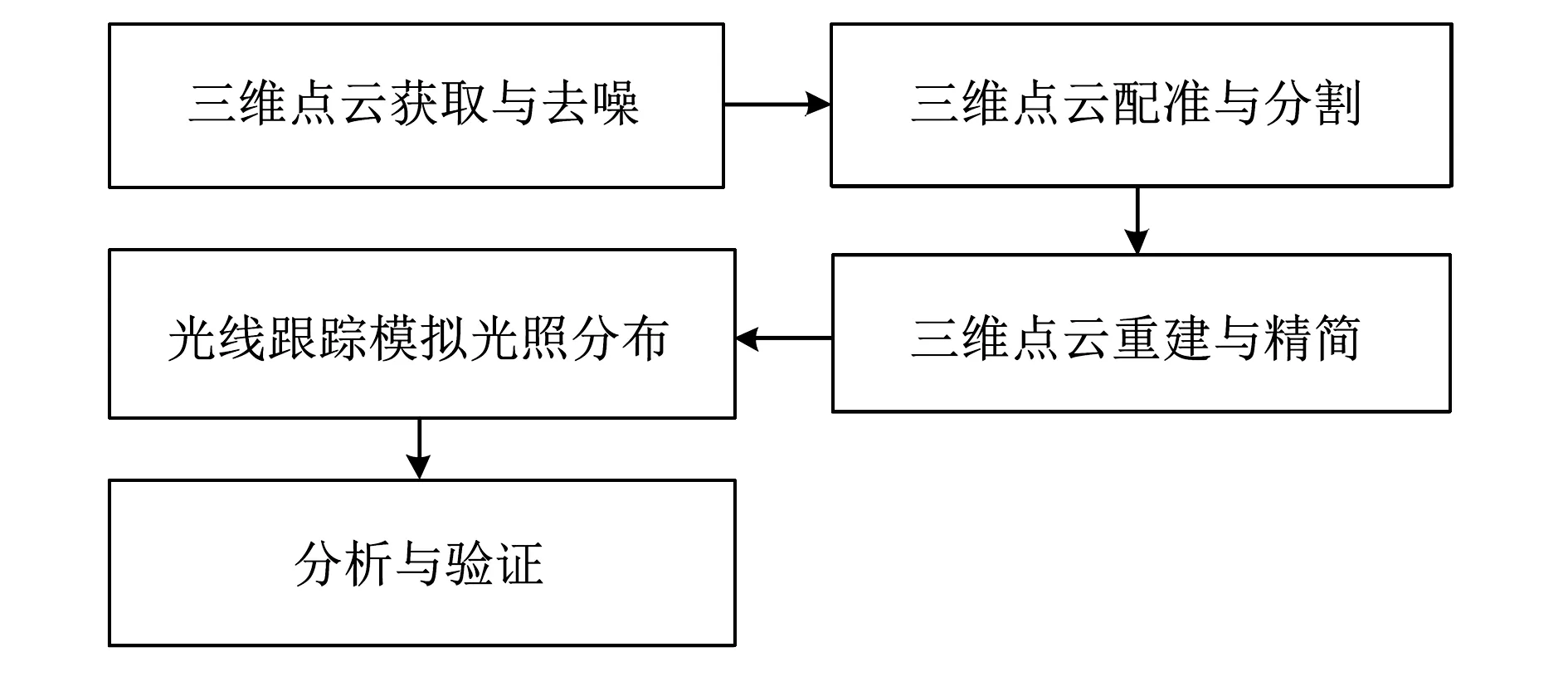
图2 植物冠层光照分布计算流程图Fig.2 Flowchart of calculating plant canopy light distribution
2 基于光线跟踪的植株冠层光照模型
光辐射是植物光合作用过程中合成碳水化合物的主要能源之一,其在植物冠层的空间分布既影响植物的光合作用,也会引起形态结构的变化。本文采用改进的光线跟踪技术进行光环境模拟和植株对光的截获。
2.1 光源模拟
在自然光源中,植株冠层的光强主要是由太阳直接辐射强度和天空辐射强度(散射辐射强度)组成[20],具有复杂性和模糊性。在计算机程序中,为了简化、定量模拟光源的行动轨迹和光照强度,本文提出天空半球概念(见图3),以单位半圆表示光源的位置,光源亮度随太阳高度角升高而增大[21]。模拟光源的轨迹方程如式(1)所示。其中,r表示光源到植株的距离;λ表示光源亮度峰值;θ表示光源到植株的水平夹角,将平角均分为12等份以表示白天12个不同时刻光源的位置,即x;变量y表示光源亮度,有
(1)

图3 光源模拟示意图Fig.3 Diagram of light simulation
2.2 光截获
2.2.1 光线跟踪算法及其改进
光线跟踪算法可以模拟光辐射在植株间传播的物理过程,并且符合真实世界中光的传播、折射、吸收等过程,可以渲染出几乎真实的图片[22],故本文将光线跟踪算法应用于植株模型光照分布的计算。原始的光线跟踪算法需要递归地跟踪每一条从视点发出的光线,涉及到大量光线与模型求交计算,处理速度低。因此,本文采用k-D树[23]对植株模型进行空间剖分,对各子空间内所含模型进行求交测试,由于子空间的有序性,光线总是与最先遇到的三角网格相交,从而避免了光线与模型相交的盲目性。构建k-D树过程中,分割平面的位置对于k-D树的质量有着关键作用,本文采用表面积启发式策略(SAH)[24],预估公式为
(2)
其中,Ct表示遍历当前节点所需的时耗;Ci表示与一个三角面片相交的时耗;x是任意选取的一个分割位置;SAL、SAR分别是该分割轴左右节点包围盒的表面积;NL、NR是左右节点包含几何基元的数量;SAparent表示当前节点的表面积。由于式(2)随着x位置的变化总体呈线性,并使用二分法确定使f获取最小值的x,因此该过程的时间复杂度为O(nlogn)。
2.2.2 植株冠层光截获
首先,加载包含基本信息的场景文件;其次,对植株网格进行空间剖分;光线跟踪开始,构造从视点到屏幕上该像素的光线,计算该光线与场景中所有物体最近的交点,若没有交点则结束;对于场景中的光源即直射光,若光源到该点之间没有其他物体,则根据Phong模型计算该光源对该点的颜色贡献值;计算散射光对植株的折射和反射,直到光线在经过多次反射和折射以后,光线对于视点的光强贡献小于某个设定值或者光线反射或折射次数即跟踪深度大于定值,则某一时刻的光线跟踪结束。算法可调节太阳高度角和亮度参数,模拟1天当中不同时刻光源的位置和强度变化情况。模拟植株对光截获的具体过程如图4所示。
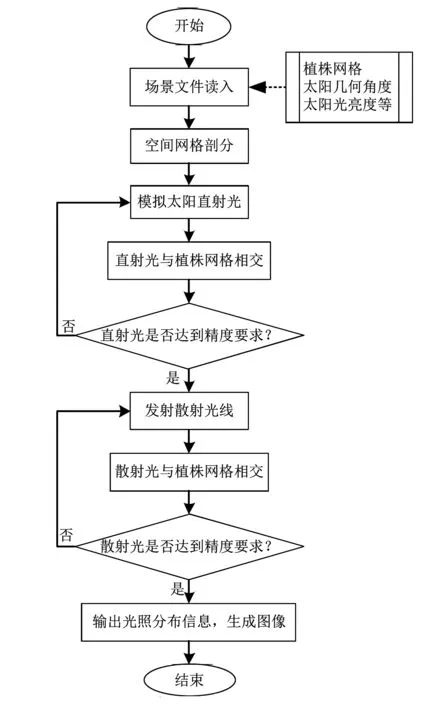
图4 植株冠层光线跟踪流程图Fig.4 Flowchart of ray tracing in plant canopy
2.3 光强估计
当光线碰撞到植物器官时,根据器官的光学特性,被吸收、反射、透射或者漫反射,本文通过光线跟踪算法模拟植株模型从8:00时到17:00时10h的光照分布情况,通过初级光线和次级光线迭代碰撞植株冠层生成累计光强图像。其中,像素的颜色表示植株的累计光强,颜色越鲜亮,表示该区域有越多的光线经过。将图像以植株为中心(C)划分东(E)、东北(NE)、北(N)、西北(NW)、西(W)、西南(SW)、南(S)、东南(SE)9个区域,如图5所示。在光源(白色方块表示)直射区域的植株亮度较大,在植株的下方由于遮挡和次级光线的反射与折射,亮度较小;每个时刻植株的亮度也有所不同,中午的植株的亮度相对于上午和下午植株亮度较大。
3 实验结果与分析
实验的环境配置是Intel(R) Core(TM) 2 Quad 2.66GHz CPU,4.00 GB内存、NVIDIA GeForce GT 320显卡,64位Windows 7操作系统。为了验证本文算法的有效性,设计对照试验以分析植株网格模型和真实植物的光照分布情况。首先,将重建后的植株模型通过光线跟踪技术处理后,其光照信息分布在二维图像上;其次,使用光照度计测量植物周围光强;然后计算模拟光照和真实光照的差异。
(a) 广东万年青8:00时 (b) 11:00时 (c) 14:00时 (d) 17:00时
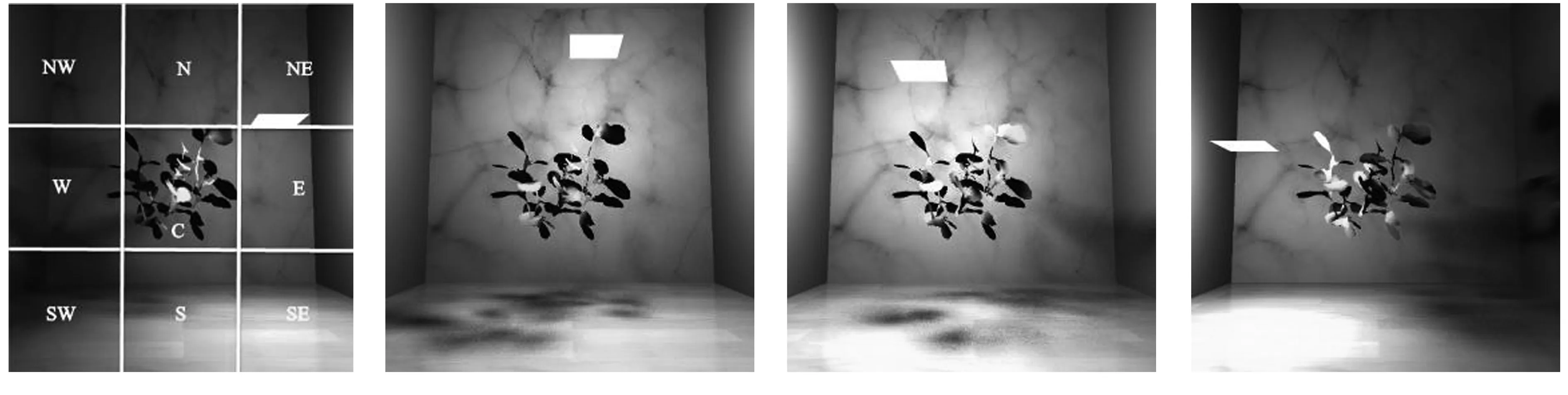
(e) 豆瓣绿8:00时 (f) 11:00时 (g) 14:00时 (h) 17:00时图5 盆栽植物冠层光照分布图Fig.5 Diagram of potted plant canopy light distribution
3.1 数字植株光强模拟
经过光线跟踪技术渲染生成的彩色图像无法直接提取其中植株的亮度信息,因此需要颜色空间转换。较其他颜色空间,YIQ颜色空间具有能将图像中的亮度分量分离提取出来的优点,并且YIQ颜色空间与RGB颜色空间之间是线性变换的关系,计算量小,聚类特性也比较好,可以适应光照强度不断变化的场合,因此能够有效地用于彩色图像处理。RGB和YIQ的对应关系用下面的方程式表示[25],本文计算图像的亮度即Y分量,有
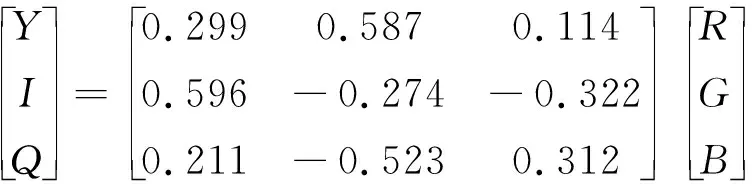
(3)
为了与实际植物光强取样点相匹配,将图像划分成9个子区域,并计算9个子区域的平均亮度。
3.2 真实植株光强获取
为了准确获取植株的光照强度,即植物表面单位面积上受到的光通量(Lux),测试环境选择天气晴朗、室内、窗户朝阳的房间;测试时间和地点分别是2017年4月29日西北农林科技大学信息工程学院;测量范围以盆栽植株为中心(C)划分东(E)、东北(NE)、北(N)、西北(NW)、西(W)、西南(SW)、南(S)、东南(SE)共9个区域。本文使用TES-1339型光照度计对植物测量光强(见图6),光谱反应符合国际照明协会CIE标准。对广东万年青和豆瓣绿分别从早晨8:00时测量,每隔1h测量1次,直至下午17:00时结束。实测数据如表1和表2所示。纵向数据表示一天当中不同时刻的光强变化,随着太阳高度角升高,光强值逐渐升高,正午时刻的光强值达到峰值,随后又回落。横向数据表示同一时刻植株9个区域的光强分布,植株的下方区域由于遮挡,光强有所减弱。

图6 TES-1339型照度计Fig.6 Diagram of TES-1339 light meter表1 不同时刻广东万年青盆栽光强分布情况Table 1 Light distribution of Guangdong Rohdea japonica at different time Lux
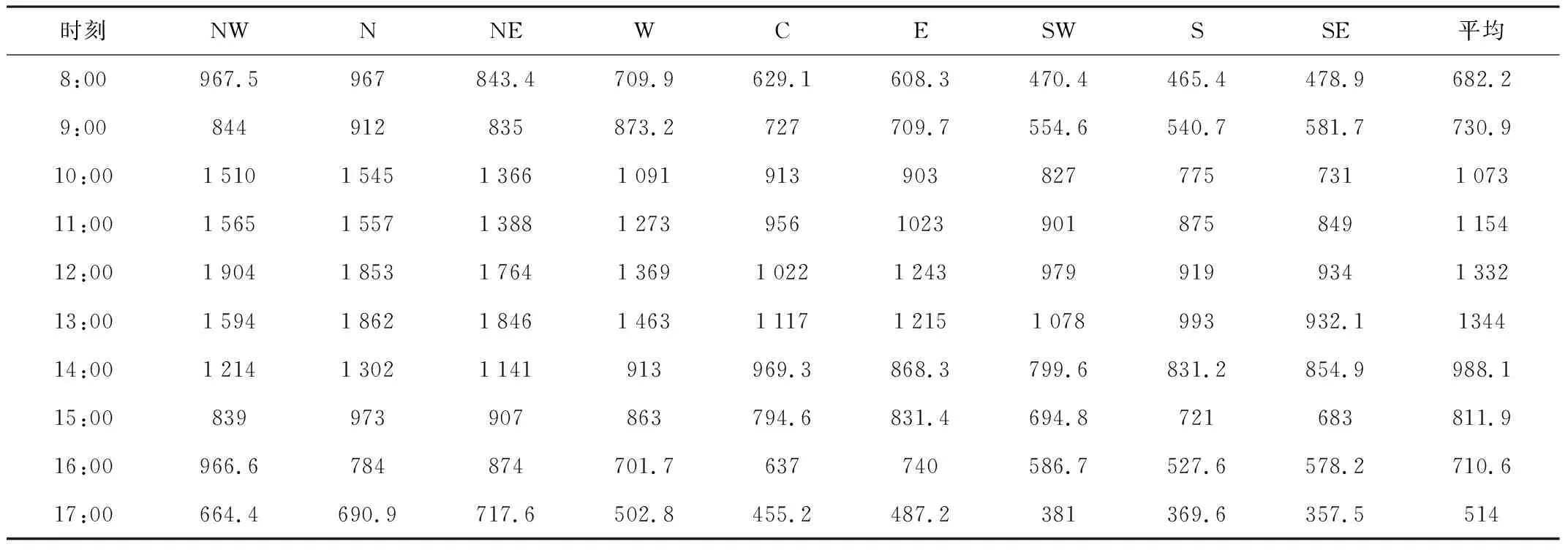
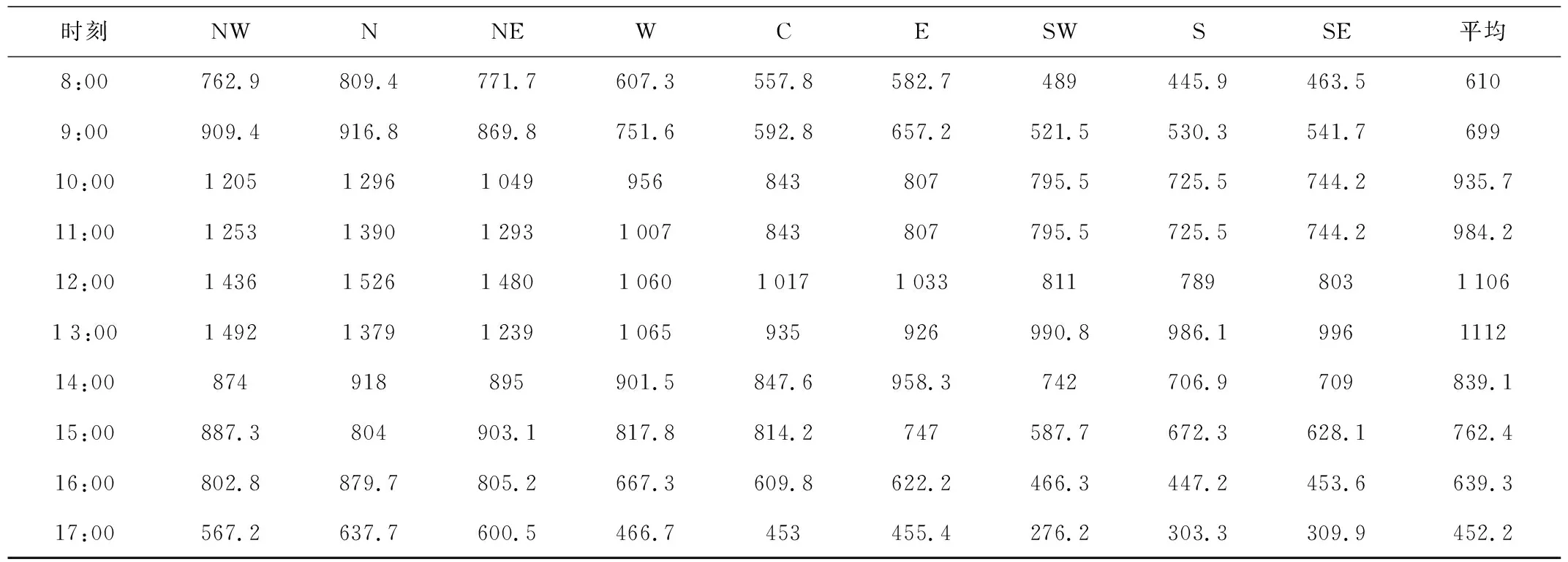
表2 不同时刻豆瓣绿盆栽光强分布情况Table 2 Light distribution of peperomia at different time Lux
3.3 植株冠层光照分布分析
3.3.1 算法有效性
为了验证算法的有效性,根据实际光强和根据光线跟踪技术模拟生成的图像亮度有较强的相关性[26]。本文首先对比了同一时刻9个不同区域的真实植株和模拟植株的光照强度分布情况。为了消除光照强度和图像亮度计量单位不一致的量纲影响,使各指标处于同一数量级,本文对数据进行min-max标准化处理。真实光强与模拟图像亮度如图7所示。盆栽植株的上侧光吸收量多,从而光照强度较大;中部3个区域由于叶片遮挡以及直接光源较少导致光照强度相对较弱。其他区域误差较大的原因是由于真实和虚拟环境的材质不完全相同,光的吸收量有所不同,从而植株外侧(区域1、2、8、9)的光强对比误差较大。
3.3.2 算法精度
为了计算本算法的精度,本文利用均方根误差RMSE来验证,RMSE反映了测量数据偏离真实值的程度,其值越小,表示测量精度越高,因此可用RMSE作为评定测量过程精度的标准。计算式如式(4)所示。其中,Xobs为真实光强,Xmodel为模拟光强,n表示10个时刻。
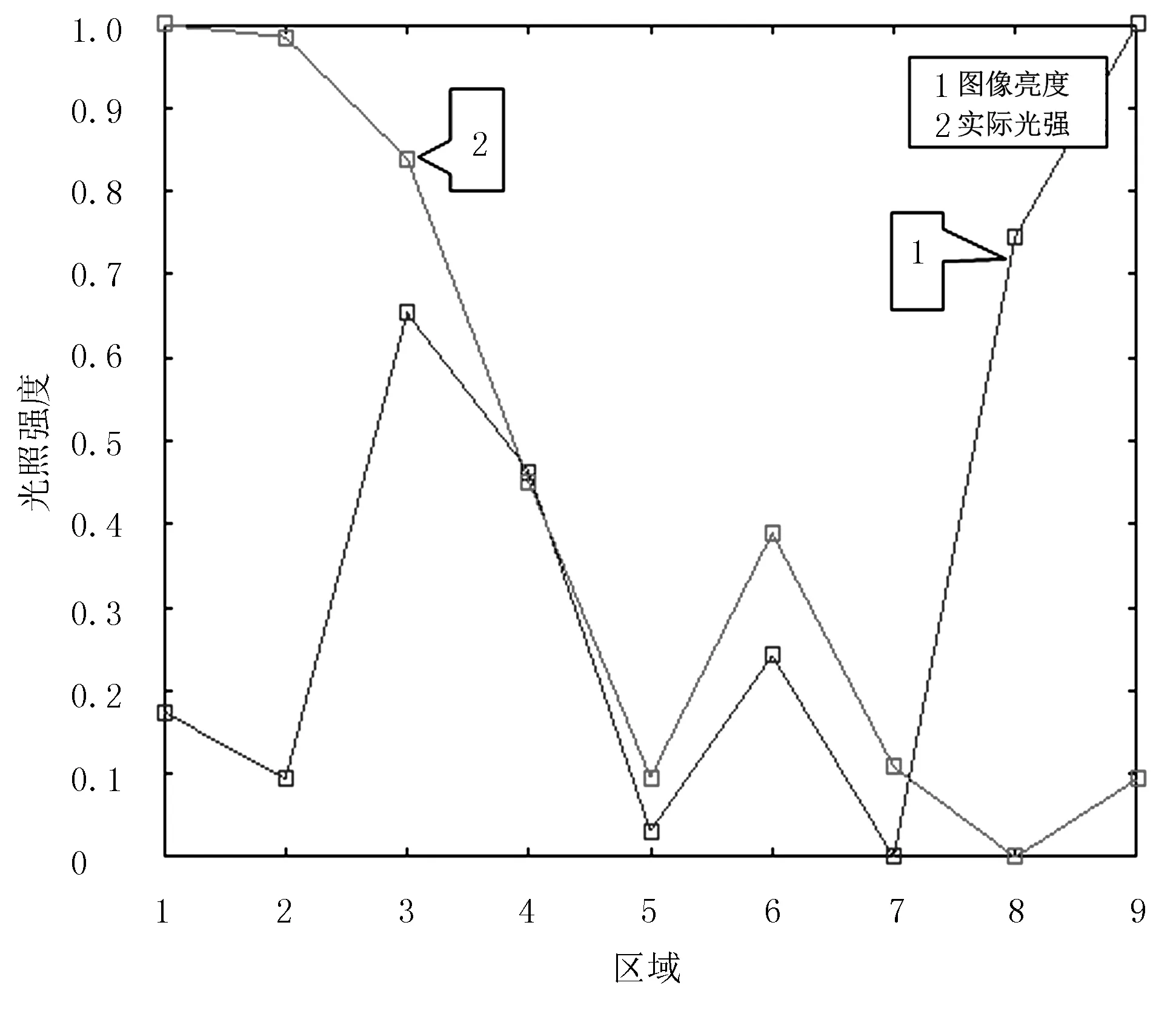
(a) 豆瓣绿12:00时

(b) 豆瓣绿16:00时

(c) 广东万年青12:00时
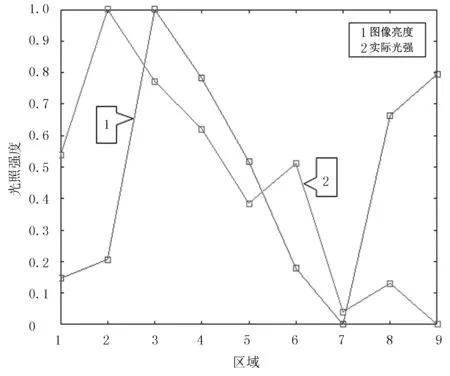
(d) 广东万年青16:00时图7 盆栽植物冠层光照强度分布图Fig.7 Diagram of potted plant canopy lightness distribution
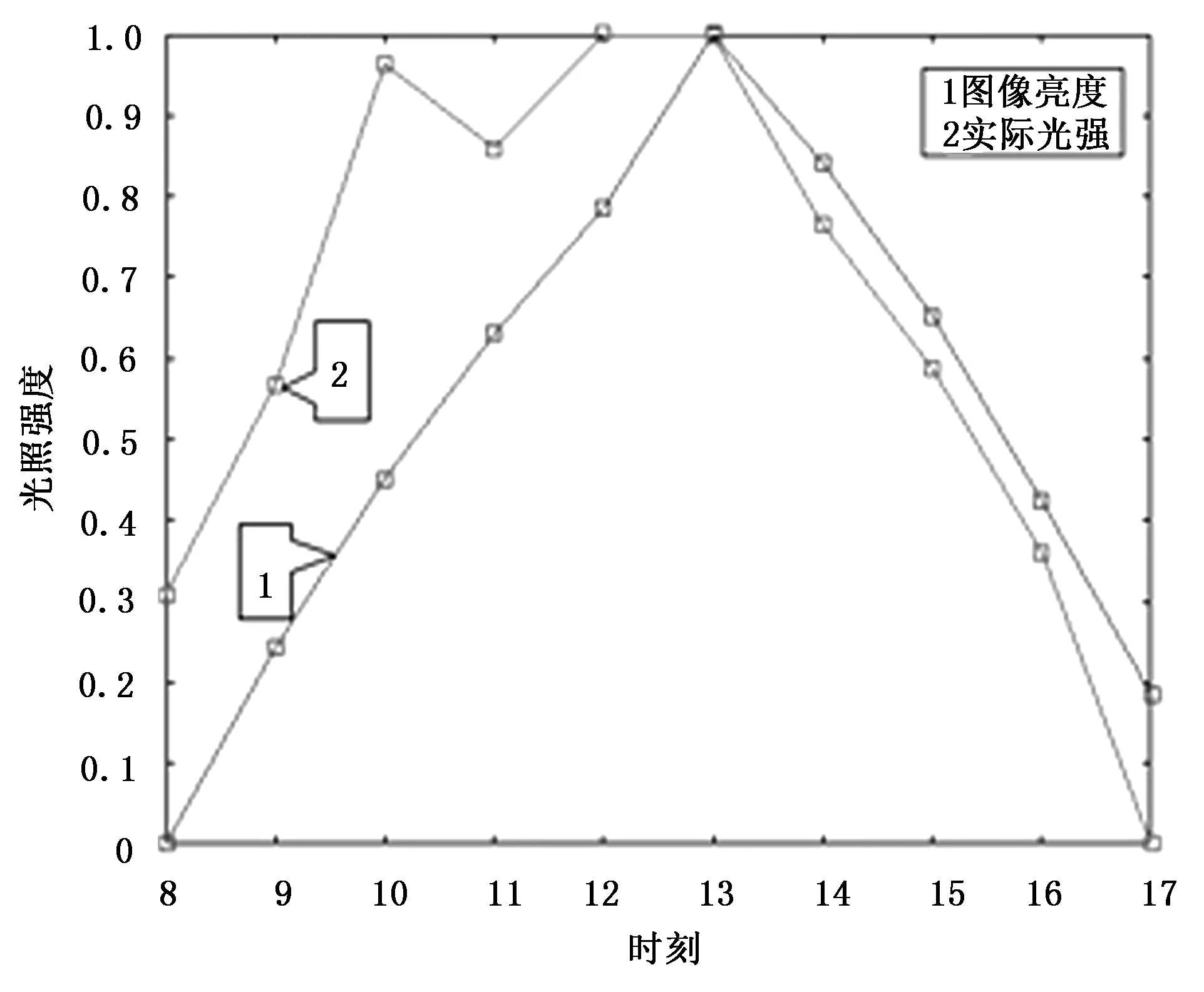
计算结果如表3所示。其中,两组植株的RMSE值分别为0.187 2、0.118 5,表示算法具有较高精度,并且本算法在点云数据处理上既保留数字植株模型的真实度,又简化了模型的复杂度。其次,本文对比了不同时刻两种盆栽植株的真实光强和模拟光强分布,如图8所示。真实光强为盆栽植株每时刻9个区域的平均光强,模拟光强为不同光源位置和亮度下基于光线跟踪算法生成的图像的平均亮度。由此可以看出:正午时刻光照强度值达到峰值,此后光强值有所回落,因此模拟植株光强的分布情况和真实光强分布情况基本吻合,有
(4)
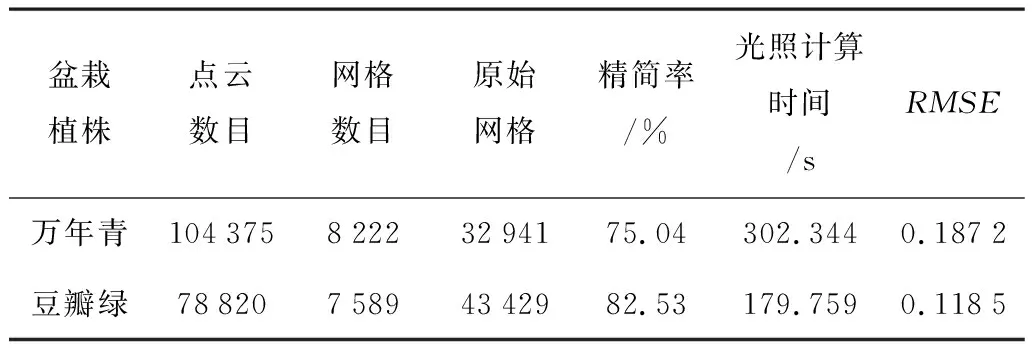
表3 实验统计分析结果Table 3 Results of statistical analysis
(a) 广东万年青
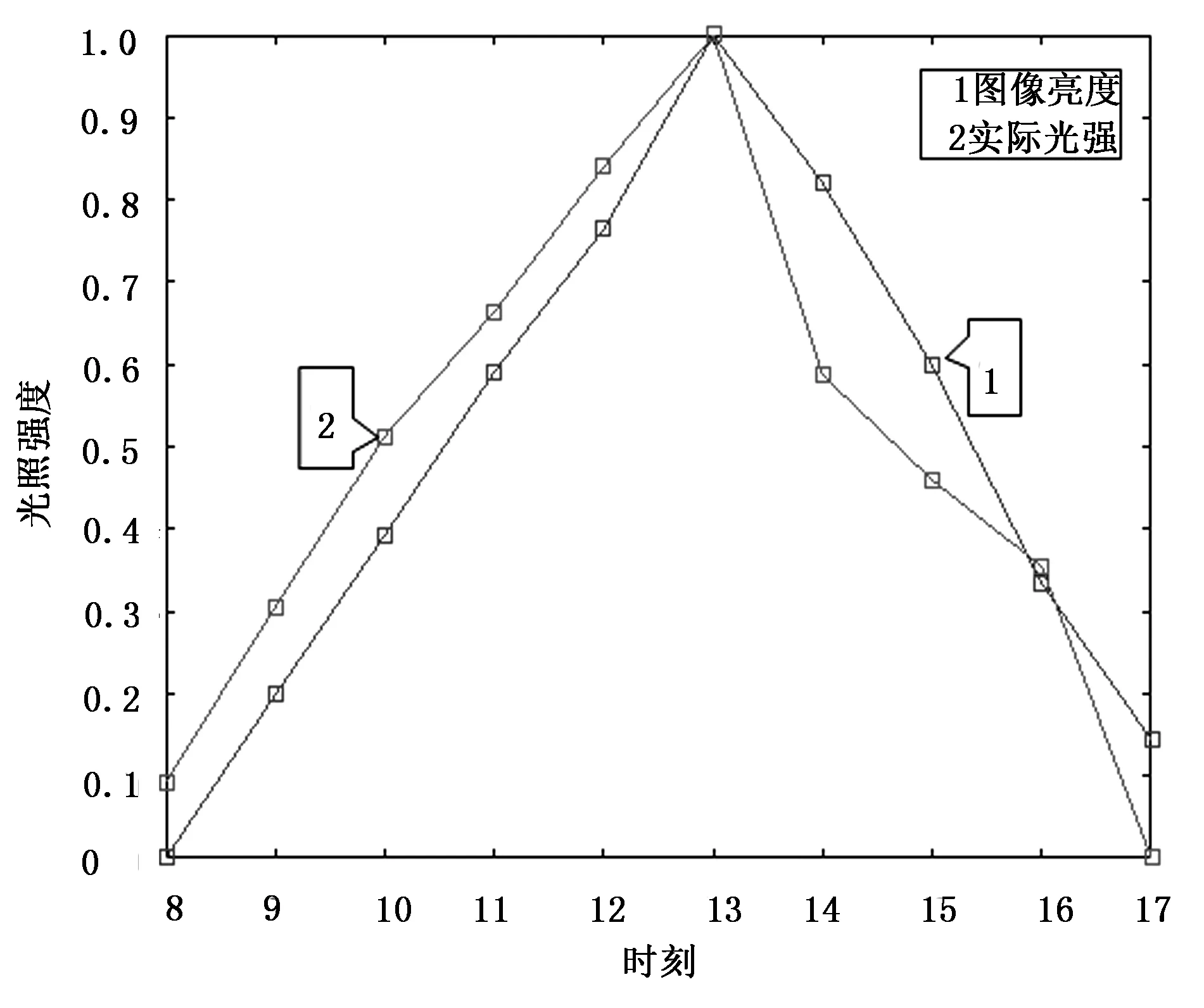
(b) 豆瓣绿图8 不同时刻盆栽植株冠层光照强度分布图Fig.8 Diagram of potted plant canopy lightness distribution
4 结论
采用图形与图像结合的方式去计算植株冠层的光照分布,对通过Kinect 2.0获取到的三维点云进行配准和重建,使用k-D树加速网格划分,利用光线跟踪算法模拟一天当中光源不同位置和亮度植株对自然光的吸收、反射和折射过程,最终生成二维场景图像。通过对比真实植株冠层光照强度和模拟植株图像亮度来分析和验证本文提出的光照分布计算方法。实验结果表明:该算法能够对植株冠层光照分布进行有效的计算。在光照分布准确度方面,两种盆栽植物的模拟光强与真实光强的RMSE分别为0.187 2和0.118 5,表明模拟光强与真实光强之间的误差较小,与实际植株光照分布情况较为吻合。因此,该方法是一种可行的光照分布计算方法。本算法也存在局限性。一方面为增强图像的真实感,使得模拟植株光照分布具有真实性,算法时间耗费略长,下一步考虑并行化计算;另一方面,本文的研究对象为室内盆栽植物,未考虑室外高大植物,后续将考虑研究室外植物冠层的光照分布模型,提高本文方法的普适性。
