超声检测缺陷三维成像技术
2019-12-19王应焘李彦军2芮执元剡昌锋王文斌3张罗丹李景俊
王应焘,李彦军2,芮执元,剡昌锋,王文斌3,张罗丹,李景俊
(1.兰州理工大学 机电工程学院,兰州 730000;2.兰州石化职业技术学院 机械工程学院,兰州 730000;3.甘肃铜城工程建设有限公司,白银 730900)
航空发动机叶片作为现代工业制造的“皇冠”,一直是中国航空工业的重中之重,其安全性问题也一直深受关注[1-2]。叶片在发动机的涡轮舱内承受高温、高压、腐蚀燃气的冲击,容易形成点蚀、裂纹、折断等缺陷,而引起重大的安全隐患[3-4]。超声无损检测方法很多,但是显示结果大多是二维图像,由于三维超声成像技术具有显示结果立体、形象直观、可调整角度观察可疑结构等优点,极大地提高了检测质量,减少了漏检、误检等现象,具有广阔的市场前景和研究价值[5]。高质量的图像能直观地反映出被测物体的三维结构,进而能够通过图像处理技术对缺陷进行定性、定量分析。将超声三维成像技术应用于航空发动机叶片的超声无损检测中,会改善叶片检测的灵敏度、结果的可靠性和准确性[6]。笔者将超声检测后得到的点云数据称之为超声点云,超声点云三维可视化技术可以直观显示被测件的整体模型,克服了传统超声检测技术缺陷显示不清楚、难以判断等缺点。
1 超声点云三维可视化技术
1.1 超声点云三维重构
为了将离散的点云重构为连续的曲面,文章应用Delaunay三角剖分与网格增长的混合方法来实现叶片超声点云的三维重构。即首先通过Delaunay三角剖分算法,将输入的点云集(见图1)分割成四面体集,剖分结果如图2所示;然后依据判断准则[见图3,图中ri与ri+1分别为四面体i和四面体i+1的外接球体半径,d为两球心之间的距离。凸包内第i个三角面片的相接系数Ii为两球心坐标与两球交点所组成夹角的余弦值。以相接系数的大小筛选三角形,选出相接系数<-0.8(夹角>143.1°),并且顶点没有重合的那些三角形]对所有四面体集中的三角形进行一次筛选(筛选结果见图4);最后通过网格增长的方法补齐曲面中的其他三角形后形成网格曲面,结果如图5所示。

图1 C扫描叶片点云原始数据的分布

图2 三维Delaunay剖分结果

图3 相邻三角形的相接系数Ii

图4 按相接系数筛选后的结果
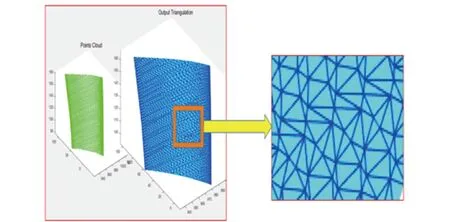
图5 网格增长结果
1.2 建立着色模型
1.2.1 OpenGL光照模型
为了使重构后的曲面看起来更加逼真,需要建立着色模型。OpenGL光照模型为Phong模型,Phong模型在模拟光照过程中综合考虑了漫反射、镜面发射和环境光的作用。OpenGL中的光源是基于三原色RGB值来表示有色光的,将以上3种反射强度值组合.就得到了如式(1)所示的Phong模型光照计算公式。
I(R,G,B)=Ia(R,G,B)ρa(R,G,B)+

(1)
式中:Ia(R,G,B)为环境光源强度;ρa(R,G,B)为环境光反射系数;Id(R,G,B)为漫反射光源强度;ρd(R,G,B)为漫反射系数;Is(R,G,B)为镜面反射光源强度;ρs(R,G,B)为镜面反射系数;m为平面上一点的法向量;v为漫反射分量;f为镜面反射集中度;h=[(s+v)/(|s|+|v|)]/2。
1.2.2 颜色映射方案
(1) CIELAB颜色空间
RGB颜色空间中基于三原色的表示方式只是通过相互混合的方式来模拟亮度的改变的,因此在视觉上给人不均匀的感觉,而CIELAB空间以数字化的方式来描述颜色变化,任何一种颜色都可以在其空间中表达出来,因此CIELAB空间所能表示的颜色种类要比RGB空间的多。如图6所示,在CIELAB空间中L*轴直接表示了亮度的改变,其范围为0~100,0为黑色,100为白色。a*轴表示了绿→红的变化,b*轴表示了蓝→黄的变化。因此任意光在CIELAB空间中可表示为
I={(L*,a*,b*)|L*∈[0,100],
a*∈[-100,100],b*∈[-100,100]}
(2)

图6 CIELAB颜色空间结构示意
(2) 制定颜色映射方案
在CIELAB空间中描述两点间色差的改变,可以直接用式(3)表示。

(3)
式中:c1,c2分别表示空间中不同的颜色值向量。
色度条实际上是由多条颜色带组成的,因此知觉均匀性是指在颜色带宽相同的条件下,相邻的颜色变化是均匀的。设ΔE为相邻颜色变化的值,c(x)表示颜色映射表中的一组颜色向量,那么假如ΔE{c(x),c(x+Δx)}/Δx=C,C为常量,就可以定义这种颜色方案是具有知觉均匀性的。
在工程领域中,获得符合特定几何规律的离散数据点的方法为:首先构造出连续的函数模型,而后再以不同的采样频率进行离散化来得到。因此,如果有连续条件的存在时,可理解为

(4)
将式(4)代入到式(3)中,可得

(5)

图7 分散映射色度曲线图
(3) Msh颜色空间
为了更方便地确定两极分散颜色映射色度中L*,a*,b*分量的值,引入Msh颜色空间,就是将CIELAB空间中的3个分量转化到Msh颜色空间下来表示。如图8所示,M表示该处颜色值的大小,s表示颜色向量与+L*轴的夹角,h表示颜色向量在红-蓝平面内投影与+a*轴的夹角。
Msh空间→CIELAB空间为

(6)
CIELAB空间→Msh空间为

(7)
假设在Msh空间中只有s是变量,则有
c(x)=[Mcos(x),Msin(x)cos(h),
Msin(x)sin(h)]
(8)
而当s(x)以不变的斜率sm变化时,便可获得图8所示的两极分散曲线。
cos2s(x)(cos2h+sin2h)]}1/2=Msm
(9)
显然,M,sm是常量的条件下,这种插值方式获得的色度表是知觉均匀的。

图8 Msh空间示意
(4) 离散化RGB分量的获取
当以sm为斜率求取离散化的s(x)值后,再经过CIELAB到RGB的转换,最终获得能够在OpenGL中实现颜色渲染所需的颜色值。CIELAB到RGB的转换必须在xyz空间中过渡,转换公式如式(10)所示。
CIELAB→CIExyz
(10)

(11)
式中:t∈[0,1], 且xn,yn,zn是参照了白点的CIExyz三色刺激值,一般默认是95.047,100.0,108.883。
CIExyz→RGB
(12)

(13)
式中的R,G,B值是为了提高图像的对比度经过γ校正后的值,因此还要经过还原过程,计算过程如下

(14)

(15)
最终所得的两极颜色映射色度条如图9所示,色度条左端为蓝色,右端为红色,并且亮度值从两端到中间的变化规律一致,即具有两极分散的特性。在设计方面,让数据中处于阈值以下的颜色呈现出冷色(蓝色端),处于阈值以上的数据呈现出暖色(红色端)。

图9 两极颜色映射色度条
(5) 插值法颜色映射
插值法是将离散的R,G,B分量分别通过曲线拟合的方法得到其连续的数学表达式,从而使得在数据点映射时,每个强度值都对应于不同的颜色。
①R分量拟合曲线如图10(a)所示,所得R分量拟合函数如式(16)所示。
f(x)=p1x5+p2x4+p3x3+p4x2+
p5x+p6
(16)
式中:p1=883(761.5,1 005);p2=-2 097(-2 403,-1 792);p3=1 229(1 023,1 574);p4=-269(-402.7,-189.3);p5=304.3(287.8,320.9);p6=84.6(83.83,85.38);括号内为置信界。
拟合优度评测参数值:残差平方和为5.415,可决系数为0.999 9,调整后的可决系数为0.999 9,均方根误差为0.456 3。根据拟合优度的评测标准,可决系数越接近于1,说明回归直线对观测值的拟合程度越好。
②G分量拟合曲线如图10(b)所示,所得G分量拟合函数如式(17)所示。
f(x)=p1x6+p2x5+p3x4+p4x3+
p5x2+p6x1+p7
(17)

图10 RGB分量拟合曲线
式中:p1=-7 067(-8 624, -5 510);p2=19 860(15 170,24 550);p3=-20 140(-25 510,-14 770);p4=8 565(5 651, 11 480);p5=-1 870(-2 624,-1 117);p6=586.4(540.9,667.9);p7=70.63(67.9,73.35)。
拟合优度评测参数值:残差平方和为55.1,可决系数为0.999 5,调整后的可决系数为0.999 4,均方根误差为1.485。
③B分量拟合曲线如图10(c)所示,所得B分量拟合函数如式(18)所示。
f(x)=p1x5+p2x4+p3x3+p4x2+
p5x+p6
(18)
式中:p1=-1 004(-1207, -810.5);p2=2 906(2 396, 3 416);p3=-2 404(-2 864,-1 944);p4=-181.6(-186.3, 170.1);p5=355.8(328.1,383.4);p6=193.8(192.5,195.1)。
拟合优度评测参数值:残差平方和为15.11,可决系数为0.999 9,调整后的可决系数为0.999 9,均方根误差为0.762 4。获得各分量的映射函数后,以强度值为各分量函数的自变量值,分别代入式(16),(17),(18)中,从而确定各点的RGB值。
2 试验结果
系统所采用的机械手为六轴串联式机械手,其末端能够准确到达在机械手活动范围内的笛卡尔坐标系六个自由度(x,y,z轴的移动以及分别绕3个轴向的转动)的任意点,从而确保获取的点云数据的精准度。图11所示为原始发动机叶片的实物图。在系统中单纯的点云数据显示不需要读取额外的数据信息,只需将点云的每个点的坐标读入即可,如图12所示。利用Delaunay三角剖分与网格增长算法对叶片点云进行重构,结合OpenGL着色并绘制,得到的结果如图13所示。

图11 航空发动机叶片图

图12 叶片点云显示

图13 叶片点云三维重构并着色结果
3 结论
针对航空发动机叶片的超声无损检测结果三维可视化技术进行研究,通过研究叶片超声点云三维成像方式、模型着色方法、叶片缺陷自动化识别等技术,开发出了显示超声点云三维成像模型、自动化检测缺陷位置的三维成像系统,试验结果表明该方法成像效果较好,能将被测件的缺陷基本准确地显示出来,然后可基于检测结果对被测件进行评估,判断其寿命、安全性和可靠性,最终实现在航空工业超声无损检测领域中的实际运用。
