基于滚动时域算法的汽车电动助力转向电流跟踪方法研究
2019-12-17薛明琛徐广飞
薛明琛,徐广飞,武 健
(1.聊城大学 a.建筑工程学院; b.机械与汽车工程学院, 山东 聊城 252000;2.山东理工大学 农业工程与食品科学学院, 山东 淄博 255000;3.聊城市农业科学研究院 , 山东 聊城 252000)
电动助力转向系统(electric power steering,EPS)是汽车转向系统的核心技术,是智能驾驶的关键部件,具有便携、灵活、节能、环保、安装方便等优点。EPS系统是以机械转向系统为基础,通过辅助电机提供辅助扭矩来实现助力转向的目的[1]。因此,EPS系统在汽车工业中得到了广泛的应用。电动助力转向系统的运行过程中,在兼顾助力转向性能的同时,需要解决模型不确定性和外部干扰等主要问题。因此,经典控制理论、现代控制理论和先进控制理论相继应用于电力转向系统控制中。
各种经典控制理论被应用于EPS控制中并且一定程度上取得了较好的控制效果。谭广兴等[2]提出了一种基于免疫模糊PID的EPS控制方法。这种基于模糊PID的控制方法可以大大提高EPS助力转向性能和操纵性能。尹春芳等[3]提出了具有良好实时跟踪能力的柔性PID控制方法。PID参数可根据运行环境实时调整,使EPS系统的响应能力更快、更准确。为了更好地提高控制性能,在此基础上,将现代控制理论结合到EPS的PID控制中。张建伟等[4]提出了一种基于遗传算法的PID控制策略,利用遗传算法对PID控制器参数进行优化,从而达到更好的控制效果。但由于参数调整困难,且未能解决鲁棒性差的问题。臧怀泉等[5]提出了一种神经网络PID控制方法,将车辆速度和扭矩传感器值作为模糊神经网络控制的输入,输出到PID中。该方法有利于提高转向的稳定性和灵敏度。
上述控制理论方法可以有效改善EPS性能,但不能解决其鲁棒性问题。为了提高系统鲁棒性,Frédéric Wilhelm等[6]考虑了EPS中摩擦力的影响,提出了一种主动补偿控制策略,设计了2个反馈回路,其中一个反馈回路用于估计摩擦力,另一个反馈回路用于最小化跟踪误差,使系统具有较好的性能及鲁棒性。Dongpil Lee等[7]基于齿条力的误差,对系统模型的不确定性采用滑模自适应方法,在很大程度上提高了系统的转矩跟踪性能。
与此同时,基于EPS的车辆综合控制及整体性能得到越来越广泛的关注。Wonhee Kim等[8]提出了一种基于EPS的汽车自动控制系统,重点解决未知参数和外部干扰,并将其导数集成到增广观测器和非线性阻尼控制器的设计中。Tsung-Hsien Hu等[9]提出了一种功率、阻尼、回程和惯性控制的逻辑方法,通过包含车速和转角信号的控制逻辑实现补偿,优化转向感觉。吴海荣等[10]在考虑路面干扰、传感器噪声等影响的基础上提出了一种混合灵敏度H∞控制策略,并进行了仿真实验和台架实验,能在实现EPS快速响应的同时抵抗路面干扰和传感器噪声的影响。陈国进等[11]设计了EPS的双回路控制结构,将神经元PID作为内环控制器,设计了一种鲁棒控制算法作为外环控制器。仿真结果表明,该方法具有良好的响应性和鲁棒性,但缺乏实际控制效果的实验验证。赵万忠等[12]以驾驶员获得良好的路感、系统获得更好的鲁棒性为控制目标,进行了混合H∞/H2的控制器设计,运用H∞方法极小化系统干扰,运用H2方法进行系统优化,但文章关注模型不确定性问题较少。文献[13-14]都证明了EPS系统存在外部干扰、非线性和不确定性,通过控制器的设计取得了一些良好的效果,但对EPS性能的关注较少。文献[15-16]关注电动助力转向系统路感的影响,主要研究了齿条力动力转向系统,对齿条力进行了估计,并基于齿条力分析及建模进行了控制器设计,可以有效地解决转向系统的转向路感问题。
上述对EPS的研究都取得了一定的成果。由于在控制器设计过程中,对模型不确定性问题以及外界抗干扰问题同时关注得较少,会影响所设计控制器的控制效果。同时,上述研究都是基于仿真层面,但由于控制设计模型与实际转向模型不可避免地存在差异,无法对算法的真实效果进行验证。基于对以上问题的探究,本文在关注EPS性能以及模型不确定性、外界干扰的基础上,提出了一种滚动时域控制方法[17],该方法通过实时采集车辆的状态计算最优控制率,并将电流的跟踪性能作为主要的控制目标之一,使系统能最大程度地兼顾鲁棒性与性能。同时,搭建了EPS硬件在环实验台对该方法进行了实验验证。
基于滚动时域控制的EPS控制结构框图如图1所示。包括汽车二自由度模型、轮胎模型、EPS系统模型、助力特性曲线以及滚动时域控制器。控制目标为实际电流对目标电流的跟踪,并将所获得的相关状态量给到控制器进行相关指标的控制,并将控制器的控制量给到EPS系统中,从而实现EPS的系统控制。
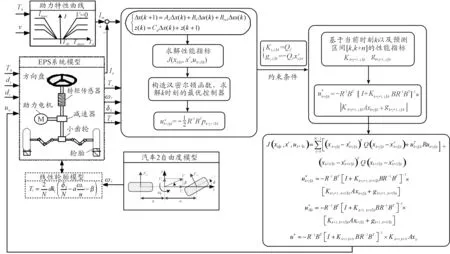
图1 滚动时域控制逻辑框图
1 汽车电动助力转向系统模型建立
1.1 汽车二自由度模型
本文主要对汽车的转向性能进行研究,所以采用具有侧向和横摆2个自由度的简化汽车模型,如图2所示。
运动微分方程可表示为:
(1)
(2)
式中:k1、k2分别为汽车前后轮侧偏刚度;β为汽车质心侧偏角;u为汽车质心速度;a、b分别为前后轮到汽车质心的距离;ωr为汽车横摆角速度;δ为前轮转角;m为汽车质量;Iz为汽车绕z轴的转动惯量。
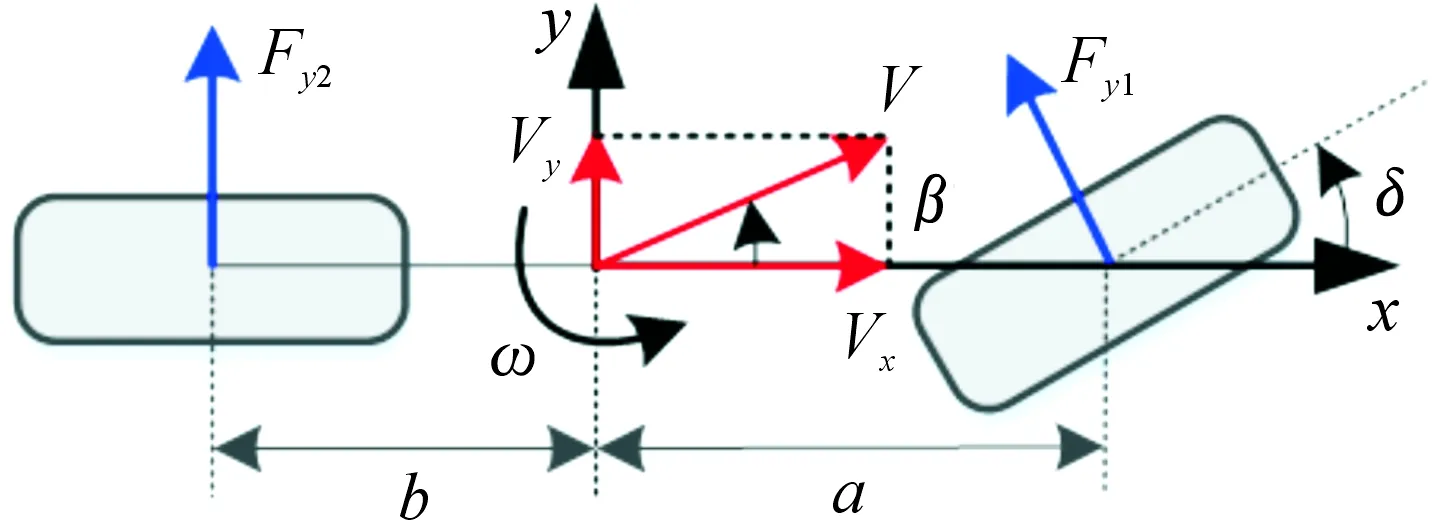
图2 汽车二自由度模型
1.2 EPS转向系统模型
本文在进行EPS模型建立过程中,为了研究方便,进行了相关的假设:EPS的管柱连接为刚性连接,不考虑在转向过程中的能量损耗。同时,本文将前轮和转向机构向转向轴简化,得到如图3所示的EPS结构模型。

图3 EPS系统动力学简化示意图
图3中:Ts为转矩传感器的测量力矩;Tm为电机的电磁转矩;Tr为路面的转向阻力矩等效到小齿轮上的力矩(传动比为N);N1Tm为电机转矩作用到转向轴上的力矩,其中N1为转向轴到电机的传动比;θm为电机的转角;δ1为转向轴转动角度;Jp为折算到转向轴上的转动惯量;Bp为系统摩擦的当量阻尼系数。
1) 转向轴模型
对转矩传感器以下的转向柱部分进行动力学分析可得:
(3)
其中Ks为传感器扭杆刚度。
2) 电机模型
EPS系统采用无刷直流电机,由霍尔电压定律可得微分方程:
(4)
(5)
Tm=KaIa
(6)

3) 轮胎模型
在小转角的情况下,轮胎变形近似线性,则路面通过轮胎作用于小齿轮的转向阻力矩[11]为:
(7)
其中d为轮胎拖距。
4) 建立系统的状态方程
由式(1)~(7)可得系统的状态方程:
(8)


Y=CX+DU
2 滚动时域控制器设计
滚动时域控制根据当前系统的采样时间,能够对将来的有限时间内的系统状态进行预测来求解当前时刻k的最优控制量,j是时间间隔,N是预测时域,控制时域用m表示,if=k+N代表了滚动时域预测的终止时间。
滚动时域控制需要采集离散的点进行优化,因此需将系统进行离散化处理:

(9)
其中:

(10)
系数矩阵可以写成:

(11)
其中:Ts为连续控制系统的控制周期;eAt为状态转移矩阵。
滚动时域控制需要进行如下假设便于进行控制器推导:
控制系统时域外的变量认为不变,即:
Δu(k+i)=0
i=m,m+1,…,N-1
(12)
传感器噪声以及路面干扰等在控制器产生电流跟踪力矩时保持不变,即:
Δω1(k+i)=Δω2(k+i)=0
i=1,2,…,N-1
(13)
参考预测形式的离散定常系统:
xk+j+1|k=Adxk+j|k+Bduk+j|k+Bωdωk+j|k
(14)
zk+j|k=Cdxk+j|k
(15)
性能指标可表示为:
J(xk|k,xr,uk+j|k)=
(16)
其中,

(17)
汉密尔顿函数可表示为:
(18)
对式(18)分别对xk+j|k和xif|k求偏导可得:

(19)
其中,
(20)

(21)
控制器的最优的控制输出可表示为:
(22)
其中,
pk+j+1|k=2Kk+j,if|kxk+j|k+2gk+j,if|k
(23)
求解的边界约束条件为:
(24)
将式(14)(15)代入(23)中,将式(25)代替uk+j可以得到:
pk+j+1|k=2Kk+j+1,if|k(Adxk+j+1|k-
(25)
式(25)可进一步求解得到:
pk+j+1|k=[I+Kk+j+1,if|kBdR-1BT]-1×
[2Kk+j+1,if|kAdxk+j+1|k+2gk+j+1,if|k]
(26)
将式(26)代入式(22)可以得到滚动时域下N步的最优解:
[Kk+j+1,if|kAxk+j|k+gk+j+1,if|k]
(27)
将式(29)代入到式(19)中,可以得到:

AT[I+Kk+j+1,if|kBdR-1BT]-1×
[2Kk+j+1,if|kAdxk+j+1|k+2gk+j+1,if|k]
(28)
其中,
(29)
滚动时域控制基于当前时刻k以及预测区间[k,k+n]的性能指标为:
(30)
从而得到在预测区间[k,k+N]内的滚动时域控制最优解:
[Kk+j+1,k+N|kAxk+j|k+gk+j+1,k+N|k]
(31)
其中:

(32)
(33)
在当前时刻k,滚动时域控制的最优控制量为uk,最优控制量可以表示为:uk+i|k,i=0,1,…,k+N-1,同时,令j=0。
[Kk+1,k+N|kAxk+j|k+gk+1,k+N|k]
(34)
Kk+1,k+N|k和gk+1,k+N|k可以从式(34)中获得。
滚动时域最优控制表达式可通过去掉参考值进一步进行简化:
[Kk+j+1,ifAxk+j+gk+j+1,if]
(35)
其中,

(36)

[Kk+1,k+NAxk+gk+1,k+N]
(37)
其中,

(38)
同时,
(39)
通过上述过程的推导求解,便可以最终获得滚动时域最优控制器:
Kk+1,k+NAxk
(40)
3 仿真实验
为验证滚动时域控制算法在进行EPS控制的效果,本文搭建了EPS的simulink仿真模型对滚动时域控制器进行了仿真验证,并与鲁棒H∞控制器的控制效果进行了对比。仿真参数表如表1所示。
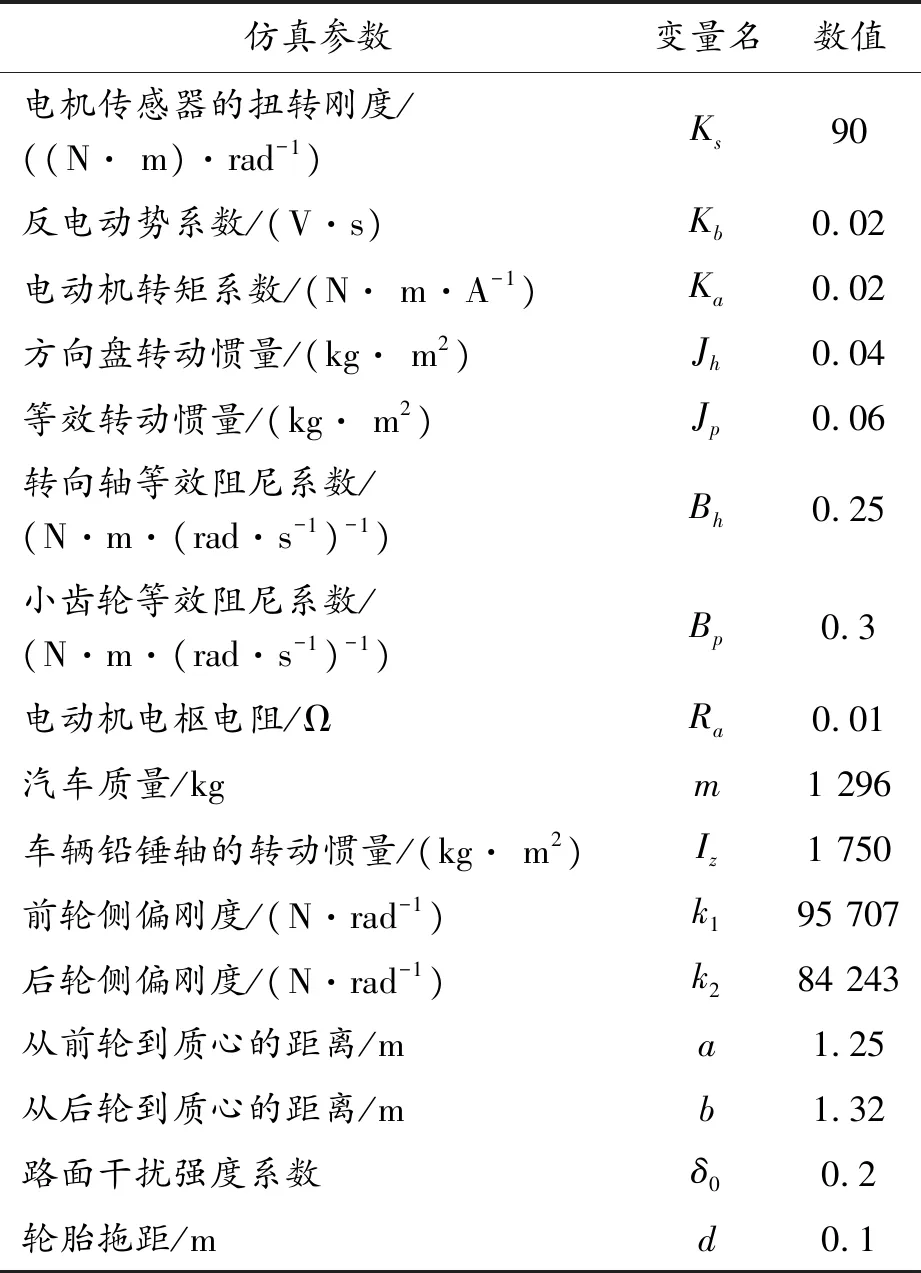
表1 仿真参数值
3.1 电流跟踪性能
被控电机的实际电流对目标电流的跟踪快慢以及跟踪性能决定了EPS系统的响应性能。通过给转向系统一个阶跃信号观察助力电机对目标电流的跟踪情况,图4为分别在鲁棒H∞控制策略与滚动时域控制策略下,被控电机实际电流对目标电流的跟踪响应情况。
从图4中可以看出:由于系统刚度与阻尼的影响,阶跃信号会使系统的目标电流产生大约0.5 s的振荡,阶跃信号鲁棒H∞控制下的电机电流在跟踪目标时,会在0~0.5 s产生一定程度的振荡,同时响应时间相对较长;而滚动时域控制基本可以消除抖动,同时,对比鲁棒H∞控制能够较快地进行响应达到稳定状态,具有较好的目标电流跟踪效果,从而能达到更好的助力效果。
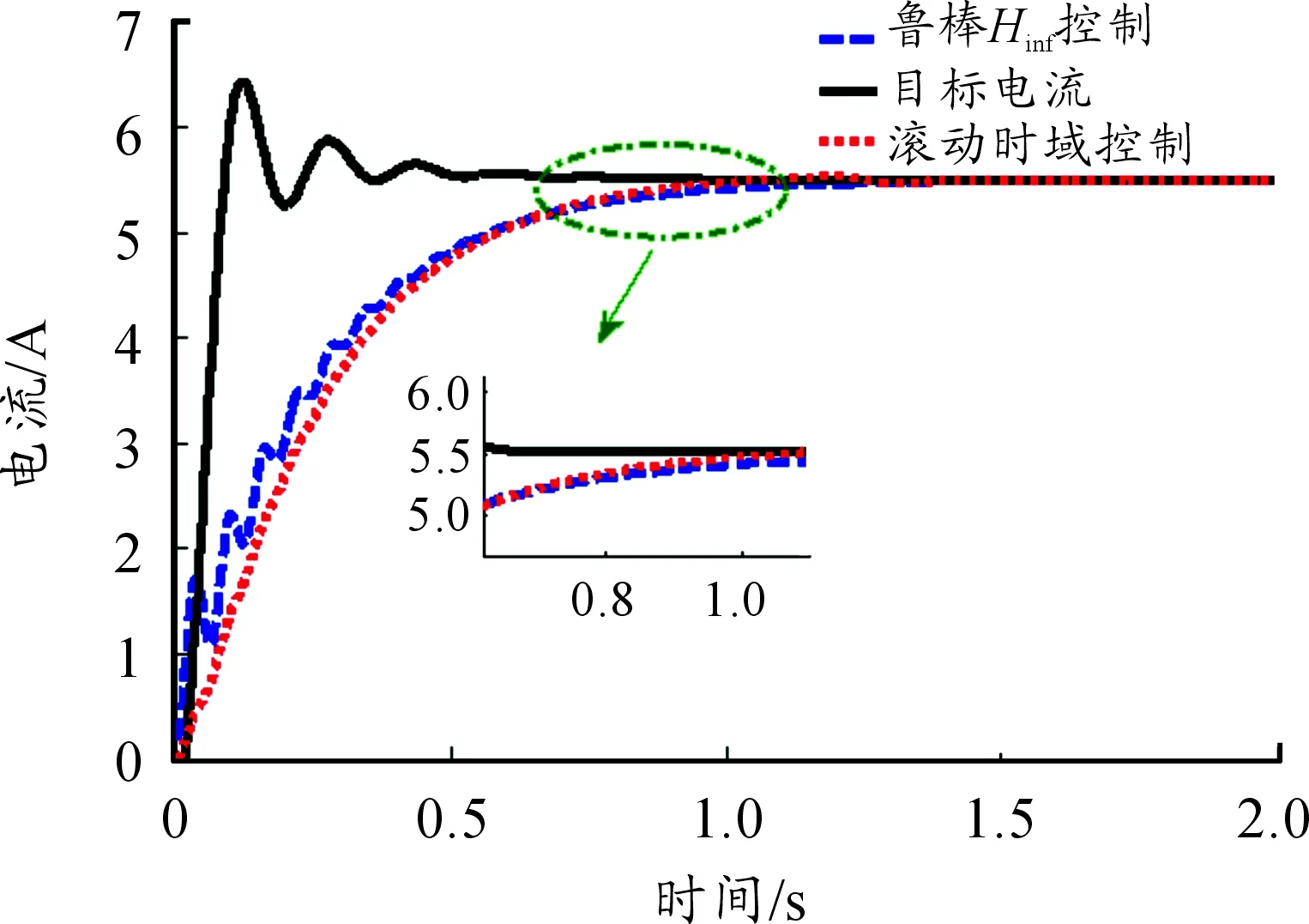
图4 电流跟踪响应对比
3.2 路感
路感为驾驶员在操纵汽车过程中所感受的转向盘力矩,在一定程度上是通过转矩传感器的测量值来表征。本文主要是对路面阶跃响应加上路面以及传感器噪声来测试所设计控制器对干扰及相关不确定性的控制情况。设置路面阶跃为δ(t)=7 N·m,同时加入白噪声进行仿真,得到分别在鲁棒H∞控制与滚动时域控制下的方向盘把持力矩阶跃响应仿真对比,如图5所示。
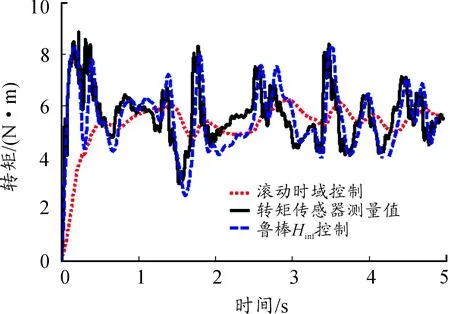
图5 扭矩传感器测量值响应对比
分析图5可知:鲁棒H∞控制的方向盘把持力矩可以很好地进行力矩跟踪,能从一定程度上消除干扰噪声的影响,但无法应对不确定性的影响,使驾驶员的路感较差;而滚动时域控制能有效消除干扰噪声的影响,相对于鲁棒H∞控制,由于其本身运算中滚动预测控制,能更加有效应对各类不确定性的影响,使得把持力矩更加平稳,超调量低,使驾驶员在各种干扰和噪声情况下也能获得更好的路感。
3.3 操纵稳定性
车辆的横摆角速度是表征车辆操纵稳定性的主要性能指标,通过加入路面阶跃时的横摆角速度变化情况可以验证所设计的控制策略下的车辆操纵稳定性能。图6所示为设置车速为30 m/s,鲁棒H∞控制与滚动时域控制下的横摆角度变化情况。

图6 横摆角速度阶跃响应对比
分析图6可知,鲁棒H∞控制下的横摆角速度在0.5~1 s时间内出现了很大的振荡以及超调,且需要较长的稳定时间,使车辆的操纵稳定性较差。本文设计的滚动时域控制器由于算法本身具有对未来时刻进行估计以及通过反复迭代产生控制结果的能力,使该控制下的横摆角速度能有非常稳定的响应,响应时间较快,曲线平稳,这保证了汽车横摆角速度对驾驶员操纵指令响应的快速跟踪性和准确性,提高了汽车的操纵稳定性。
4 加入滚动时域控制器的EPS硬件在环试验
在上节的仿真试验中,滚动时域控制器得到一定程度的验证,本节将所设计的滚动时域控制器嵌入到搭建的EPS试验台架上,对所设计的控制器进行实验验证,主要考察实际电流对目标电流的跟踪情况,验证控制器的性能。EPS试验台架如图7所示,在模拟原地工况下,对方向盘施加力矩,并通过dspace软件controldesk实时测量记录实际电流对目标电流的跟踪数据,分析比较在鲁棒H∞控制器与滚动时域控制策略下EPS系统的助力性能。试验结果如图8、9所示。
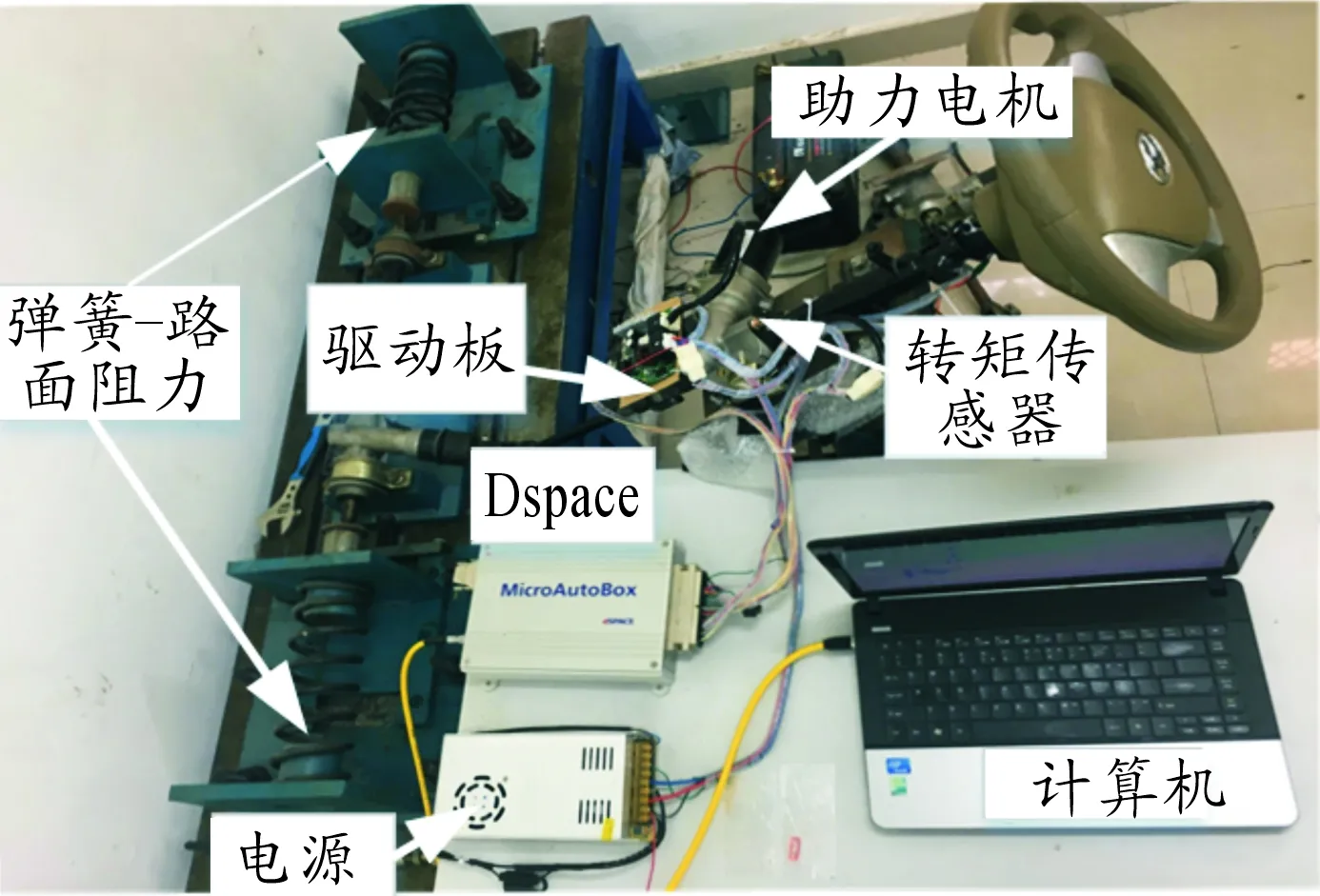
图7 EPS系统硬件在环试验台架
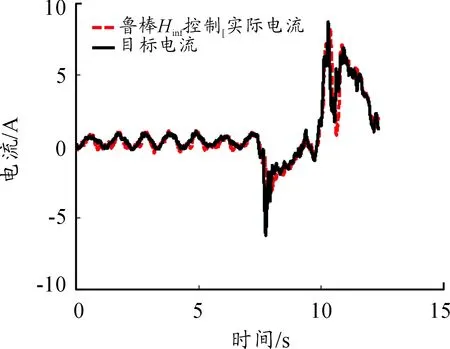
图8 鲁棒H∞控制电流跟踪曲线

图9 滚动时域控制的电流跟踪曲线
从图8、9中可以看出:鲁棒H∞控制下的电流跟踪效果较差,尤其是在目标电流急剧变化的10~11 s内,同时,存在较为严重的滞后,使得EPS系统的性能相对较差;而滚动时域控制的实际电流能很好地跟踪目标电流,响应较快,没有明显的滞后,同时,在5 s附近目标电流高频振荡区,即受到干扰以及不确定影响的情况下,具有一定的干扰抑制能力,一定程度上能解决模型不确定性问题,使EPS具有更好的性能和鲁棒性。
5 结论
1) 本文建立了EPS系统数学模型,并以电流有较好跟踪性能、驾驶员有较好的路感、有更好的操纵稳定性为控制目标,运用现代控制论的方法构建系统的状态空间方程,设计了滚动时域控制器。
2) 为验证所设计滚动时域控制器,建立仿真模型进行仿真验证,并与鲁棒H∞控制器进行了对比。仿真结果表明:所设计的控制器具有良好的电流跟随性,驾驶员具有良好的路感,车辆具有良好的操纵稳定性,能有效抑制干扰噪声并应对模型不确定性,并能在保证系统的鲁棒性以及鲁棒稳定性的同时提高系统性能。
3) 为验证控制器的实际控制效果,将控制器嵌入到实验台架上进行硬件在环实验,并与鲁棒H∞控制进行对比,实验结果表明,所设计控制器能够在实际系统中较好地实现电流跟踪,改善系统的性能、鲁棒性、鲁棒稳定性。
4) 本文所设计控制器主要考虑的影响EPS系统的几个主要性能指标,对于系统刚度变化、运动过程的摄动以及系统的参数变化等未加考虑,下一步将更加全面地考虑更多指标,建立更加符合使用要求的控制系统。
