井旁溶洞的偶极反射声波测井响应研究∗
2019-11-30乔文孝车小花鞠晓东
李 丹 乔文孝 车小花 鞠晓东
(1 中国石油大学 油气资源与探测国家重点实验室 北京 102249)
(2 中国石油大学 北京市地球探测与信息技术重点实验室 北京 102249)
0 引言
目前,碳酸盐岩储层的开发成为了油气田增储上产的主力军,对其储集类型的研究具有重要的意义。碳酸盐岩油气藏的储集空间通常分为原生孔隙、溶洞和裂缝三类。反射声波测井可以对井旁几米至数十米范围内的地质构造进行探测评价,是评价碳酸盐岩储层井旁孔洞的有效手段之一。反射声波成像测井以辐射到井外地层中的声场能量作为入射波,探测从井旁地层界面、裂缝、溶洞、盐丘等声阻抗不连续界面处反射(或散射)回来的声场。通过对回波信号进行处理,可以清晰地对井旁地质构造进行成像[1−7]。多年来,国内外许多学者对反射声波测井的原理、方法和仪器进行了研究和改进。Schlumberger 公司于1998年推出了反射声波成像测井仪原型机BARS[8],开创了反射声波测井现场应用的先河。薛梅[9]、车小花[4]、何峰江[10]从数值模拟、物理模拟和数据处理等方面对单极反射纵波成像方法进行了一系列基础研究工作。早期的单极纵波反射声波成像测井方法采用单极声源和单极接收器,仪器的测量结果没有周向方位分辨能力。为了克服单极纵波法存在的缺点,Tang[11]将偶极子声源和偶极子接收器用于反射声波测井中,推出了偶极横波反射声波成像测井技术。然而,由于偶极声源和接收器具有对称的指向性,偶极横波反射成像测井得到的反射体的方位具有180◦的不确定性。Schlumberger 公司的Sonic Scanner 仪器[12]以及Halliburton公司的Xaminer Sonic仪器[13],接收声系均包括13 个环形接收站,每个接收站均由8 个周向均匀分布的接收单元组成,每个单元独立接收信号,具有一定的方位分辨能力。乔文孝等[14−15]将相控阵技术应用于反射声波成像测井中,提出了方位反射声波成像测井方法,通过对独立接收的八方位声波信号进行相控阵接收处理,准确地获得了井旁反射体的距离和方位。
前人在反射声波测井工作上做了大量研究,在实际偶极横波反射声波测井资料处理中,对于尺度较大的地质构造,如地层反射界面、断层等,偏移成像图中有明显的指示;然而对于尺度较小的地质构造,如裂缝、孔洞等,成像图中往往没有类似的指示。这是因为当异常体的尺度接近或小于声波波长时,回波信号以散射波为主,且回波幅度较小,在反射波的成像图中得不到清晰的异常体反映。因此,本文对井旁溶洞的偶极反射声波测井响应进行了研究。首先,利用有限差分方法,得到了井旁溶洞的散射波波形;然后,分析了散射波的波形特征,总结了等源距波形中散射波的规律;最后,对散射波进行偏移成像处理,提出了一种井旁溶洞在偶极反射声波测井成像图的识别方法。
1 数值模拟方法及结果分析
1.1 计算方法
对于井旁溶洞偶极反射声波测井模型,不存在解析解,只能进行数值求解。有限差分法是一种常用的数值模拟方法,广泛应用于弹性波在复杂介质中传播特征的研究。实际地层中的溶洞近似为一个三维球体,数值模拟井旁空洞的声波散射成像问题应该采用三维有限差分方法,且需要计算充液井孔中多个不同深度的声源产生的声场及井内多个声波接收器接收到的不同源距的接收波形信号。本文利用二维柱坐标系有限差分方法近似模拟了井旁溶洞模型中的偶极反射声波测井的过程,没有采用更为严格的三维有限差分计算的原因是:采用二维模型模拟相比三维模型模拟在计算时间上有明显的优势,二维计算是三维计算的近似的结果,也可以得到所研究问题的主要特征。柱坐标中各向同性介质中的速度-应力波动方程如下所示:
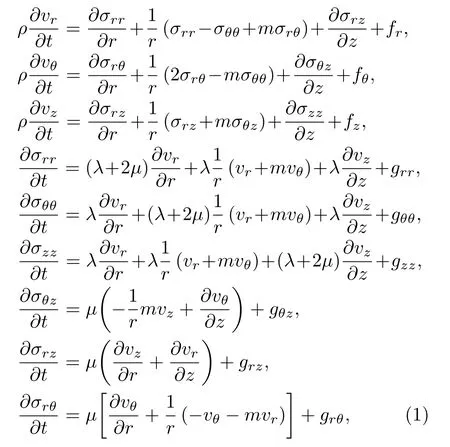
式(1)中,ρ为介质密度,vθ、vr、vz为速度分量,σrr、σθθ、σzz、σrz、σrθ、σθz为应力分量,λ成为拉梅系数,µ为剪切模量。当声源分别为单极、偶极或四极时,m取值为0、1或2。g和f为声源项,取值方式如下:
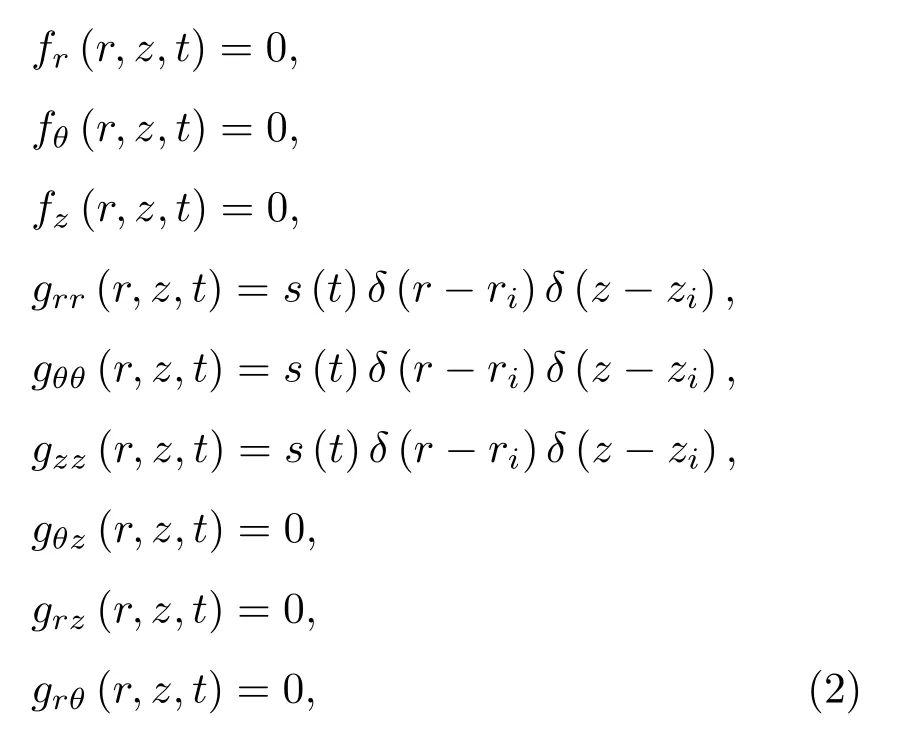
式(2)中,s是声源函数,δ是脉冲函数,ri和zi是第i网格的坐标,i是网格的序号。声源函数s为雷克子波函数,

式(3)中,f0是为声源的中心频率,τ0为声源激励的延迟时间。
1.2 计算模型
针对井旁溶洞的偶极反射声波测井的研究,设计如图1所示的计算模型,图1(a)是无溶洞模型,图1(b)是模型井旁地层中有一圆形溶洞,回波波场通过有无溶洞的两种模型波场作差求得。声源和接收器均放置与井孔中,井孔和溶洞中均填充流体。计算模型尺寸为15 m×5 m,网格尺寸为0.01 m×0.01 m,网格数为1500×500。井孔半径为0.1 m,溶洞中心的坐标为(7.5 m,4 m)。声源中心的初始坐标为(0.5 m,0 m),最小源距为2 m,最大源距为5 m,接收器间隔0.1 m,共计31 个接收器。定义z= 15 m处为深度零点,最小源距的中点为深度记录点,即第一个深度记录点为13.5 m。模拟实际测井的上提过程,每次上提0.5 m,共上提19 次,即最后一个深度记录点为4.5 m。各介质的弹性参数如表1所示。
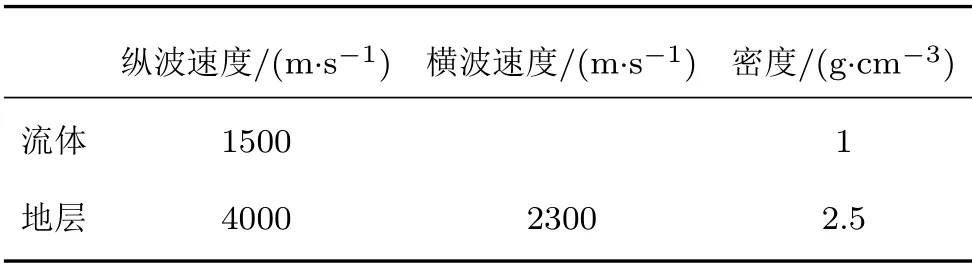
表1 各介质声学参数Table1 Acoustic parameters of model
声源的时域波形及频谱如图2所示,声源的中心频率为3 kHz,地层横波速度为2300 m/s,横波脉冲波主频处的波长为0.77 m。改变溶洞直径,分别为0.5 m、0.8 m、1.6 m (即2/3、1、2 倍地层横波波长),探究溶洞尺度的大小改变对回波波形的影响。
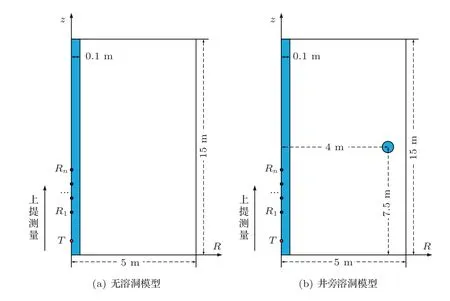
图1 溶洞模型反射声波测井模拟示意图Fig.1 Schematic diagram of dipole reflection imaging in cave model

图2 声源的时域波形及其频谱Fig.2 Source wave in time and frequency spectrum
1.3 计算结果分析
图3为深度记录点为4.5 m时溶洞直径为1.6 m的阵列波形图及其STC 处理结果图。井孔模式波主要包括P 波和S 波。P 波到时较早,幅度很弱;S波到时较晚,幅度较强。P 波相关性较差,速度约为3980 m/s,基本等于地层纵波速度;S波相关性较好,速度约为2200 m/s,略低于地层横波速度,这是由于偶极子波的频散特性造成的。
根据设计模型,回波的理论视速度可以由第i个接收器与第j个接收器间距RiRj与到时差∆tij的比值求得,已知相邻接收器间距为0.1 m,散射波路径由图4中黑色虚线所示,到时ti可由式(4)求得:
式(4)中,TRi为声源与第i个接收器的源距,lr为溶洞在r方向与井轴距离,lz为溶洞在深度方向上的坐标,d为深度记录点深度,v为计算速度,计算S-S 波时取地层横波速度。通过对图4模型计算阵列接收器回波到时,S-S波到时与源距关系如图5所示,RiRj的接收到时差∆tij可由式(5)得出:
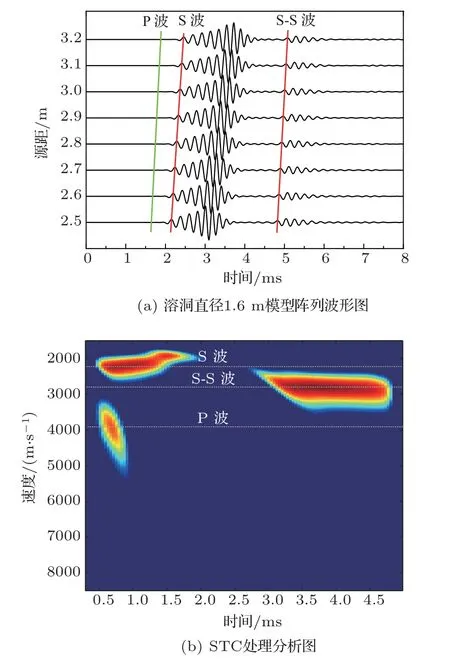
图3 深度记录点为4.5 m 处的数值模拟波列及STC 分析图Fig.3 Wave train of numerical simulation and STC diagram when the depth is 4.5 m
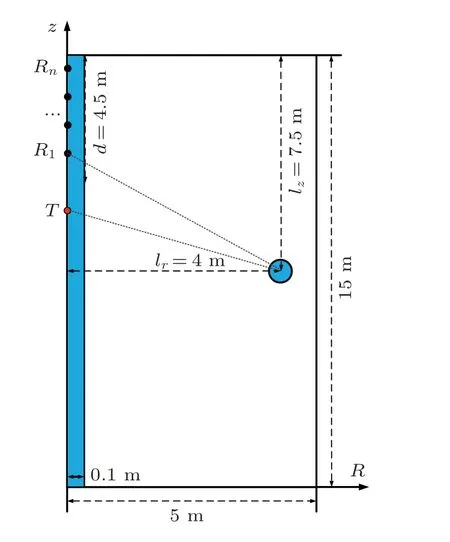
图4 深度记录点为4.5 m 时S-S 回波视速度计算示意图Fig.4 Velocity calculation diagram of S-S echo when the depth is 4.5 m
通过式(5)计算,S-S波的视速度约为3000 m/s,与图3(b)中STC 处理出的S-S 波视速度2850 m/s略有不同,导致视速度差距的原因是式(5)计算采用的是溶洞中心的坐标而实际情况产生散射处为溶洞外界面,从STC 分析结果来看,此差距对视速度影响较小。
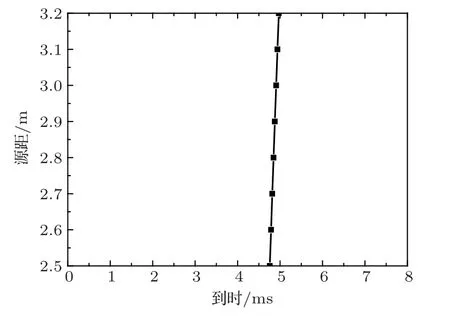
图5 深度记录点为4.5 m 时计算的S-S 回波到时与源距关系图Fig.5 Time and source distance diagram of S-S echo when the depth is 4.5 m
图6为深度记录点为4.5 m、源距为2 m 时,无溶洞模型的井孔模式波和三种不同孔径模型的回波波形图。回波的幅度随溶洞直径的增大而增大,井孔模式波的幅度远大于回波的幅度。当溶洞直径为0.5 m 时,S-S 波的最大幅度约为偶极横波最大幅度的1/10;当溶洞直径为0.8 m 时,S-S 波的最大幅度约为偶极横波最大幅度的1/7;当溶洞直径为1.6 m时,S-S 波的最大幅度约为偶极横波最大幅度的1/10。溶洞直径越大,溶洞的外壁越接近于井孔,回波的到时越早。
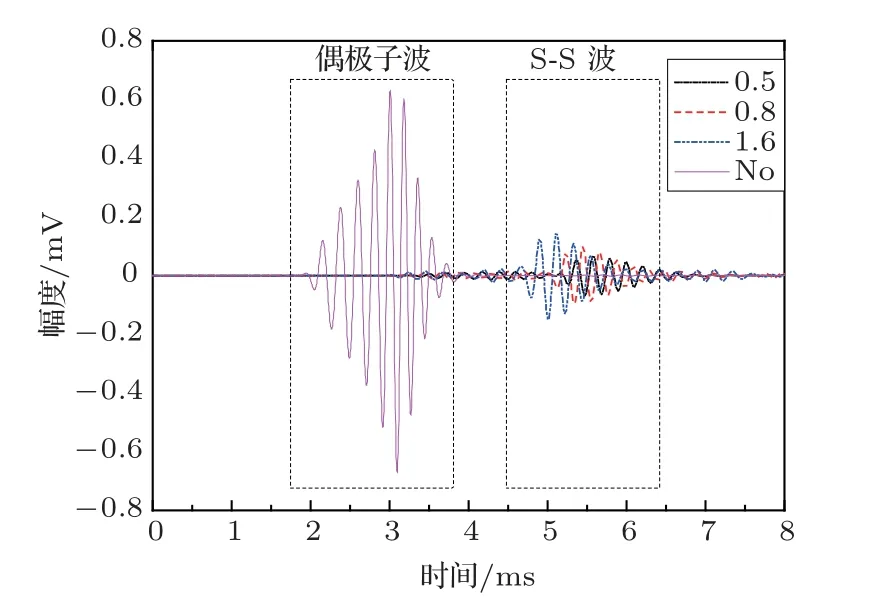
图6 不同尺度溶洞直达波和回波波形Fig.6 Waveforms of different scale hole echo and no cave model
图7为不同模型的等源距阵列波形图,源距均为5 m。等源距波形中的井孔模式波到时相同,波形幅度一致。当源距中点深度为溶洞所在深度位置时,S-S 回波幅度最大,到时最早;随着仪器提升,当源距中点深度靠近或远离溶洞位置时,S-S 回波到时逐渐靠后,幅度逐渐减弱。从S-S 回波同相轴的形态来看,与过井轴声阻抗不连续面反射产生的“V”字形特征不同,井旁溶洞产生的散射波特征为“抛物线”形,这是在波形图上判断井旁溶洞构造的重要波形特征之一。
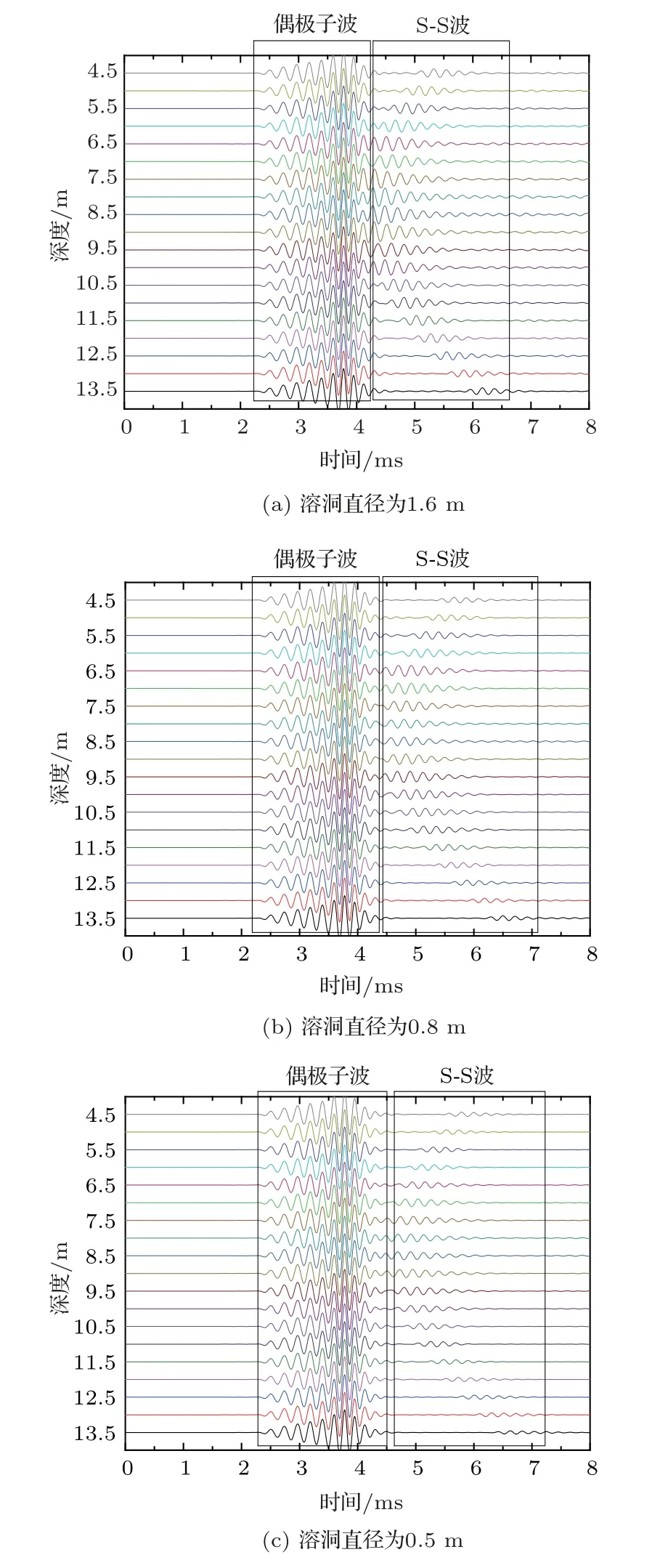
图7 不同模型的等源距阵列波形图Fig.7 Waveform of different size apertures’ cave in common offset gather
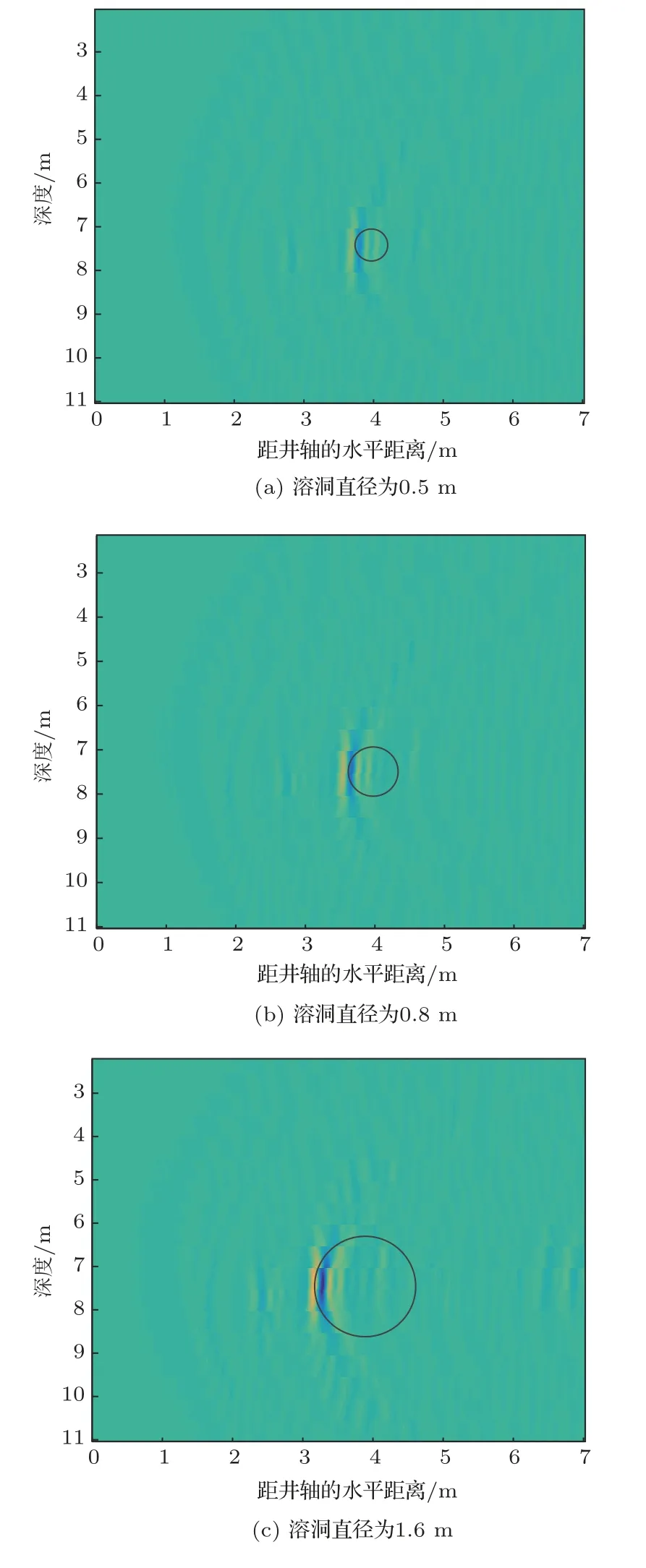
图8 不同溶洞模型的偏移成像图Fig.8 Migration imaging of different size apertures’ cave
图8为不同溶洞模型的偏移成像图。图中黑色实线标出的是实际溶洞在模型中的位置,成像位置显示了溶洞前界面的准确位置。对比“抛物线”状波形,偏移结果也有类似抛物线状结果,只是对溶洞所在深度位置叠加效果更为明显。从偏移成像的效果来看,当溶洞直径从2/3波长增大到2 倍波长时,如图所示,溶洞的成像幅度逐渐增大,成像效果逐渐清晰。
2 结论
(1)本文通过二维柱坐标系有限差分方法模拟了井旁溶洞的偶极反射声波测井响应,得到了井旁溶洞尺寸不同情况下的回波信号,探究了地层横波波长与井旁溶洞尺度之间的关系。当溶洞直径从2/3个波长增大到2个波长时,溶洞偏移反演的成像结果逐渐清晰,显示逐渐增强。
(2)井旁溶洞产生的散射波的等源距波形同相轴中具有“抛物线”型特征,这与井旁地层反射界面产生的“V”字型特征不同。在等源距阵列波形中,溶洞的深度位于源距中点深度时,S-S 回波到时最早,幅度最强;随着仪器提升,源距中点深度逐渐靠近或远离溶洞的位置时,S-S回波幅度逐渐减小。
