一种基于实船试验的风浪中舰船旋回运动要素辨识方法*
2019-11-28张炜灵
霍 龙 蔡 烽 王 骁 张炜灵
(海军大连舰艇学院航海系 大连 116018)
1 引言
旋回运动性能是舰船操纵性的一项重要性能,通过实船试验可以求出舰船的一系列旋回运动要素,如横距、纵距、旋回直径、战术直径等[1]。当前我国舰船设计常以静水中的航行性能作为参数指标,然而大量实验表明,水面舰船在风、浪中的航行性能与其在静水中的航行性能有很大差别[2],直接影响舰船的航行安全。因此,准确测量风浪中的实船操纵性能尤为重要[3]。
2 风浪中舰船旋回要素辨识方法
2.1 实际海况对舰船操纵性的影响
舰船在实际海况中航行时,会受到风、浪和洋流等外部环境的影响和作用,导致舰船航向稳定性下降,甚至丧失保持理想航向的能力,产生旋回漂移、顺浪尾横等现象,影响舰船的航行安全[4]。
风对舰船的操纵性能会产生影响,当风速与航速比较大时更为显著,不同风向会导致舰船航向不稳定[5];波浪对保持航向和舰船的操纵性也有显著的影响,在波高较大时,舰船的稳性显著下降,产生6自由度摇荡,保持航向的能力显著下降[6]。
流对操纵性的影响与风浪不同,舰船在流中的航迹是其自身运动和随流漂移的合成运的结果[7]。所以,舰船通常可以用舰船与海水之间的相对速度来处理。开阔海域的局部表面流速度一般是稳定的,流速与流向接近常数。因此,如果流速较大并且较为稳定的条件下进行试验,则应该剥离流的影响,修正试验结果。
2.2 获取洋流信息的方法
获取流向流速信息主要有3种途径。
第一种是通过查潮汐表和海图上的潮流花来确定流向流速,这种方法获取的流向流速信息是一个常数,在天气条件较好,且试验时间较短时相对可靠;
第二种是通过测波浮标测量海表面流和波浪信息,该方法所测得的海浪和海流信息精度较高,但成本较高,试验开展相对复杂;
第三种是通过船载计程仪测出的对水速度与对地速度解算出的表面流信息,但实际试验数据表明,由于对地速度是风浪流的综合作用结果,该方法获取的表面流信息数据波动较大,存在较大误差。
本文采用第一种方法获取的表面流的信息。
2.3 风浪中旋回运动要素辨识方法
开展本次实船旋回试验完全按照国际惯用的《舰船操纵性试验规程》[8~9]执行,选取右舵 15°和30°两种舵角进行试验,旋回运动要素如图1所示。
在开阔海域中,由于万吨以下舰船一次旋回历时一般在10min以内,可以近似认为整个旋回过程的流速和流向是稳定的,通过矢量迭加的方法可以消除流对旋回轨迹的影响,从而对旋回轨迹的偏移进行修正。
以电罗经提供的航向HT为风浪中无流航向,并与由试验或资料获得的流向HF、流速VF、对地航速VC一同作为已知量,推算舰船在剥离流影响后纯风浪中的航速VT为

采用航程积分法[10],根据每个时间点的罗经航和剥离流影响后的航速VT,通过式(2)、(3)可解算出舰船的实时方位坐标,利用梯形近似法可得到舰船旋回的枢心轨迹[11]。
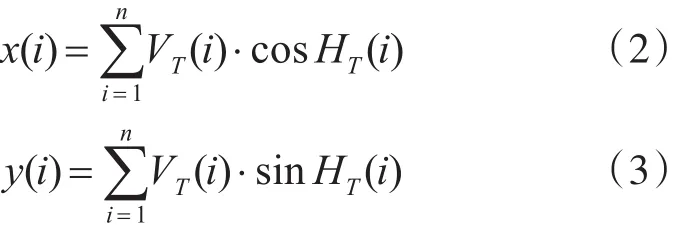
其中,x(i)和 y(i)是第i s时航行轨迹的x,y坐标,第HT(i)和VT(i)为第i s时的航向和航速,n为回转试验总时长(s)。
3 辨识旋回要素实例
3.1 实船试验的基本情况
此次实船试验于2018年4月17日早晨0630-0700在黄海长山群岛附近海域,广鹿岛以南,獐子岛以西的开阔海域进行。海面波高小于0.5m,有小涌,水深48m,流向34°,流速0.9节;气温8.6℃,气压1015hPa,相对湿度68%,平均风速5m/s,平均风向178°;试验舰船长163.5m,宽22.2m,平均吃水5.9m,排水量约为9996t。试验从0630开始,进行了两车进二的15°舵角和30°舵角的试验。
两车进二,15°舵角试验开始于0632,历时867s。如图2(a)所示,为实测的航向、航速曲线。将流进行矢量叠加之后,可得到如图2(b)所示的舰船在纯风浪中的航向、航速曲线。
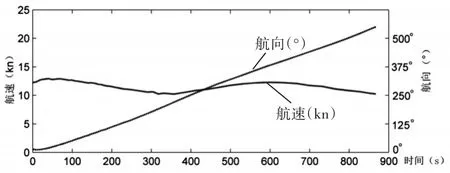
图2 (a) 两进二、15°舵角航速、航向

图2 (b) 两进二、15°舵角叠加流速后航速、航向
两车进二,30°舵角试验开始于0649,历时610s。实测的航向、航速曲线和将流进行矢量叠加之后,舰船在纯风浪中的航向、航速曲线分别如图3(a)和图 3(b)所示。
通过图2(a)和图2(b)及3(a)和3(b)的比较可以看出,将流进行矢量叠加以后,航向变化不大,而航速到某值后基本趋于稳定,这与理论上舰船在静水中旋回特点更加接近,说明利用航程积分法叠加流描绘轨迹的方法是有效的。下面通过实际轨迹描绘来说明。
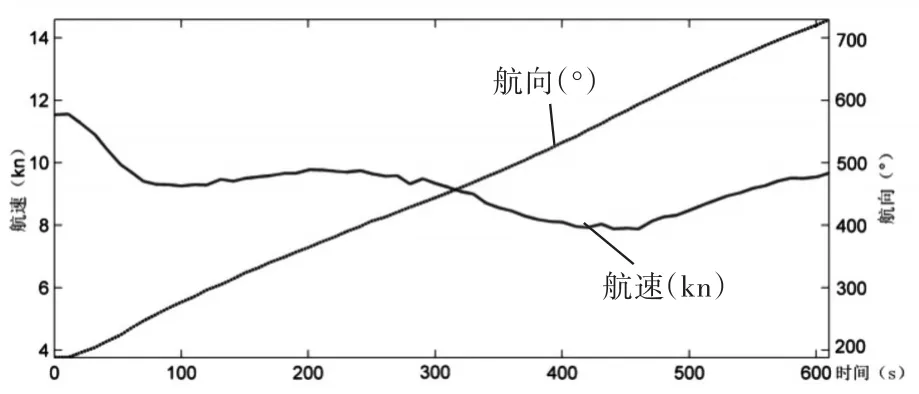
图3 (a) 两进二、30°舵角航速、航向
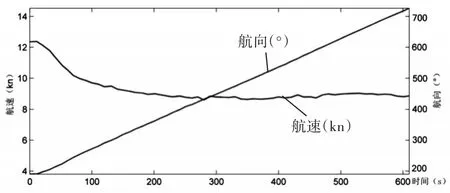
图3 (b) 两进二、30°舵角叠加流速后航速、航向
3.2 枢心轨迹描绘
将图 2(a)和图3(a)的数据进行内插处理后,利用Matlab绘图可以得到图4(a)和图4(b)的旋回枢心轨迹[11]。
3.3 剥离流速影响后的枢心轨迹
通过2.3节介绍的方法,在剥离流速影响后,用Matlab绘制航行轨迹,得到如图5(a)和图5(b)所示的枢心轨迹。
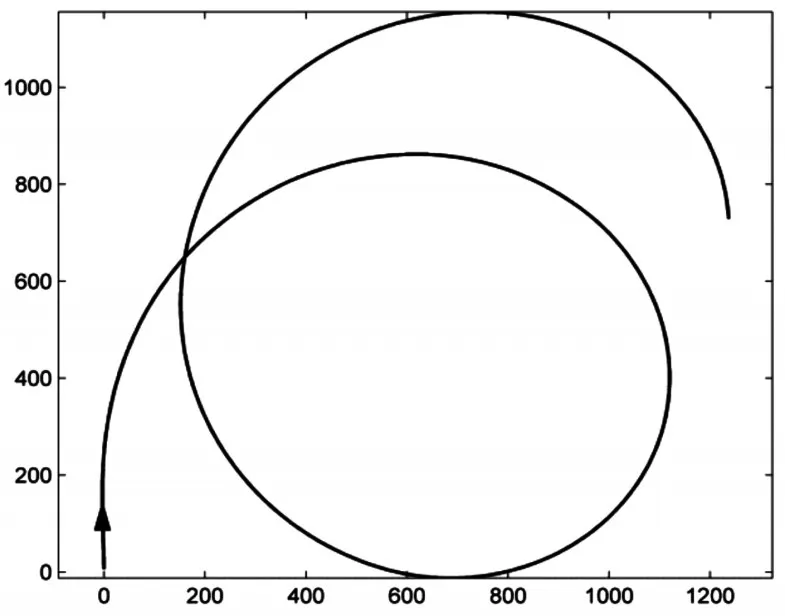
图4 (a) 两进二、15°舵角内插后的流中枢心轨迹
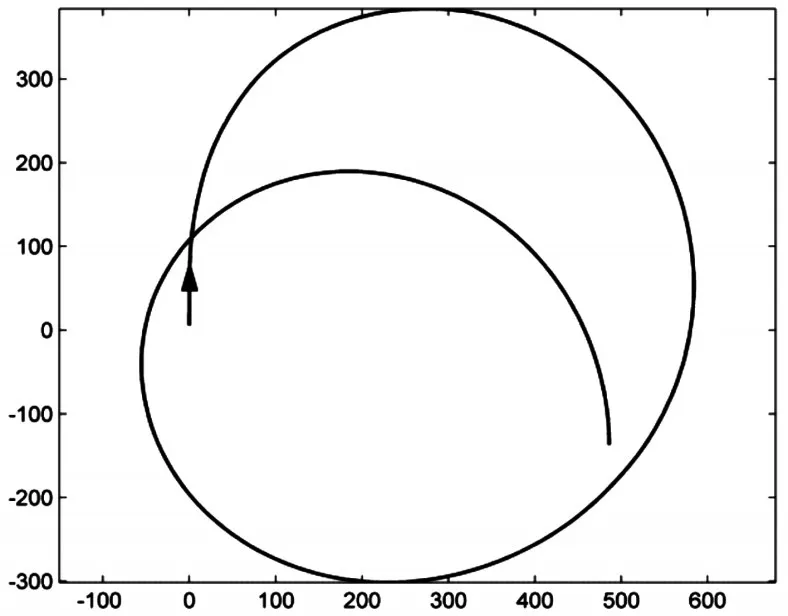
图4 (b) 两进二、30°舵角内插后的流中枢心轨迹
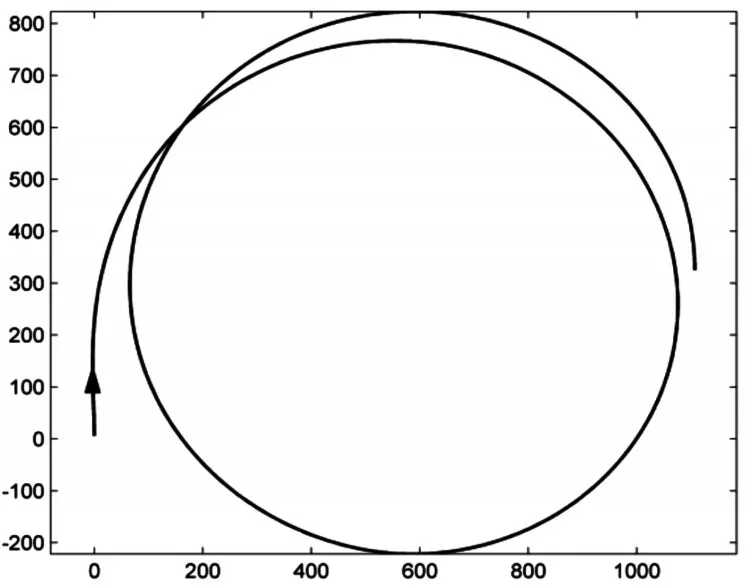
图5 (a) 两进二、15°舵角剥离流后的枢心轨迹
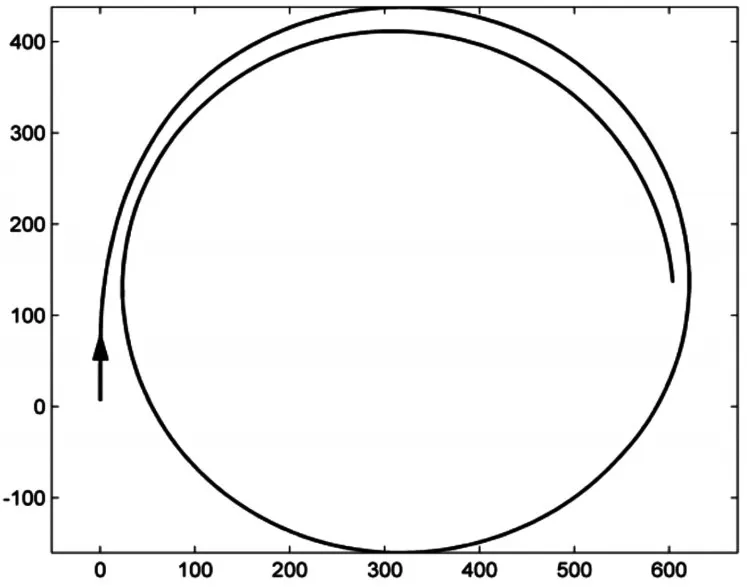
图5 (b) 两进二、30°舵角剥离流后的枢心轨迹
通过图4(a)与5(a)以及4(b)与5(b)的对比可以看出,剥离流后的枢心轨迹非常接近理论上舰船在静水中的旋回轨迹,这说明通过这种方法实现的轨迹描绘是合理的。
3.4 风对枢心轨迹的影响
舰船在航行中受风的影响,会边向前航行边向下风方向漂移。舰船在正横受风时漂移速度可由式(4)表示[12]:

其中:V'为航行中风致漂移速度(m/s);Va为真风速(m/s);Ba为船体水线上侧面积(m2);d 为舰船实际平均吃水(m);Lwl为水线面长度(m);V0为舰船航速(kn)。
本次实验中,风速Va约为5m/s,试验舰船的航速V0约为8~12节,平均吃水d为5.9m,水线长Lwl约为144m,水线以上侧面积Ba约为2244 m2。
由式(1)求得正横受风时,风致漂移速度V'为0.06m/s~0.11m/s之间,而在非横风的情况下则要小于该值。风致漂移会对旋回的轨迹有一定影响,这也是导致剥离流影响后的旋回轨迹(图5(a),5(b))虽然比流中旋回轨迹(图4(a),4(b))更接近正圆,但与理论静水旋回轨迹(图1)仍有一定偏差的主要原因。由于风致漂移的速度远小于流速,可判断风对枢心旋回轨迹的影响远小于流的影响。而舰艇旋回运动时的风致漂移速度是动态变化的,规律较为复杂,本文暂时未考虑剥离风的影响。
3.5 旋回运动要素辨识
根据水面舰船操纵性试验开展的条件及要求[13]:试验海区水深不小于舰船吃水的5倍,试验海区要求开阔,没有乱流,海水的密度和温度不允许有阶跃和明显变化,试验海域风力不超过蒲氏2级,海况不超过2级。
本次实船试验开展的天气及海况条件基本符合开展操纵性试验的要求标准。但如果根据未剥离流的影响的试验数据直接绘算,所得到的舰船旋回运动要素即被视为本舰船的旋回运动要素。如表1所示。
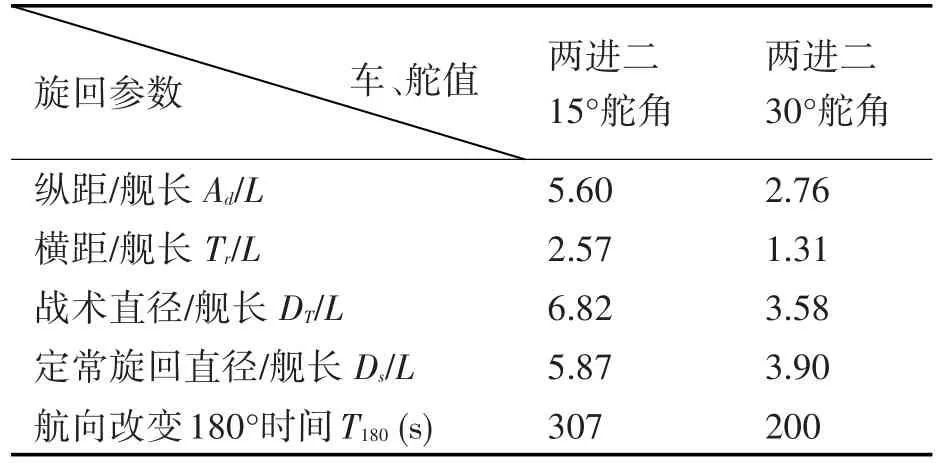
表1 流中旋回运动要素表
而根据本文提出的方法解算出该船在风浪中旋回的各项参数,如表2所示。

表2 静水旋回运动要素表
从而得到实际海况中与风浪中旋回要素的差值,如表3所示。
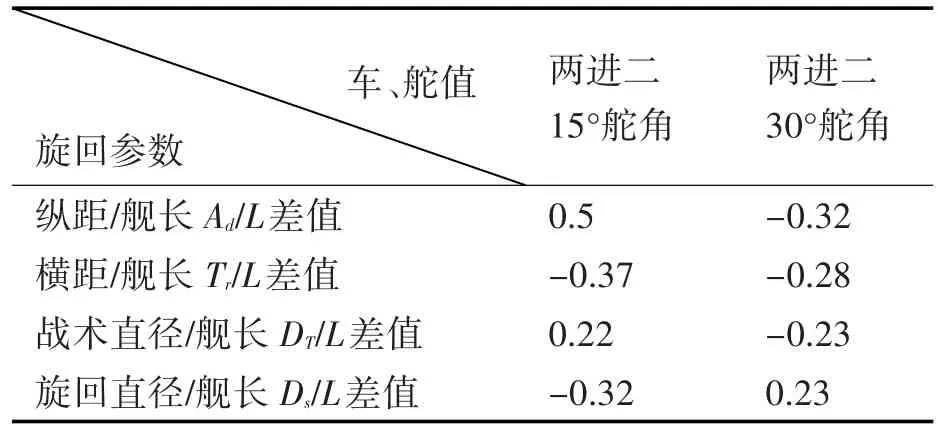
表3 流水与静水中旋回运动要素差值表
4 结语
通过对比可以看出,舰船在流中的旋回要素相较静水普遍存在0.2~0.5倍舰长的偏差,而且偏差值有正有负,这说明舰船在流中测出的旋回运动要素时大时小,呈现出不稳定的特点,不利于舰船操纵者准确掌握本船的操纵性能。
试验结果表明,当航向、航速测量比较精确时,通过航程积分法描绘舰船旋回的枢心轨迹是可行的。通过内插,可以提高精度,并且通过矢量叠加法能够剥离流对旋回的枢心轨迹的影响,从而得到舰船在静水中的旋回枢心轨迹和重心轨迹。
由于实际开展实船操纵性试验时,很难找到天气、海况完全理想的试验条件,因此,选取流速相对稳定的海域开展旋回试验,并应用本文的方法剥离流对试验的影响,从而辨识出舰船在风浪中的旋回运动要素,对操船者准确掌握本舰船旋回运动性能具有比较重要的参考价值。
