基于老年代步车的车载智能管理系统设计
2019-11-19查懿伦
查懿伦


【摘 要】针对现有的老年代步车功能上进行智能化改造,在现有的功能基础上增加避障功能、自动巡航功能、电池管理系统等功能。其中避障功能采用超声波检测障碍物,使其遇到障碍物时能减速或停车。自动巡航功能通过限制电机转速,从而使得车辆的行驶速度固定在某一个数值。防盗功能是在车辆上装上倾角传感器,当车辆被移动时,传感器会检测到相应的加速度与角速度,当测量的速度超过某个固定数值时,即可人为车辆被移动,从而车辆发出声音警报。电池管理通过使用专用的电源芯片,编写程序来进行电池的电量显示、充放电等功能。
【关键词】车载智能管理系统;超声波避障;自巡航;倾角传感器
中图分类号: TP391.44;TN929.5文献标识码: A文章编号: 2095-2457(2019)25-0031-002
DOI:10.19694/j.cnki.issn2095-2457.2019.25.014
Design of on-board Intelligent Management System Based on Elderly Scooter
ZHA Yi-lun
(School of electrical and electronic engineering,chongqing university of technology,Chongqing 400054,China)
【Abstract】Based on the existing functions of elderly mobility vehicles,intelligent transformation is carried out.On the basis of the existing functions,obstacle avoidance function,automatic cruise function,battery management system and other functions are added.The obstacle avoidance function adopts ultrasonic detection to slow down or stop when encountering obstacles.The automatic cruise function fixes the vehicle's speed at a certain value by limiting the motor speed.The anti-theft function is to install an inclination sensor on the vehicle.When the vehicle is moved,the sensor will detect the corresponding acceleration and angular velocity.When the measured speed exceeds a certain fixed value,the human vehicle can be moved,and the vehicle will issue sound alarm.Battery management through the use of a special power chip, write a program to display the battery power,charge and discharge functions.
【Key words】Vehicle intelligent management system;Ultrasonic obstacle avoidance;Since the cruise;Dip sensor
0 引言
作為老年代步车,避障是老年代步车在行驶过程中必须要解决的问题[1]。常见的老年代步车避障有红外避障和超声波避障。红外避障检测范围小,而且容易受到各种类型光源的干扰;而超声波避障检测距离较广,超声波模块与舵机相连还能检测来自不同方向的障碍物,检测范围宽,检测距离长,不易受到外界其他因素干扰,是一种避障的好方法[2]。
目前,关于老年代步车在超声波避障方面的研究相对比较多,其中大多数研究是从电机驱动原理、调速方案、测距原理方面等分析。
自巡航功能是老年代步车中较为重要的一个功能。常见的自巡航功能是通过在老年代步车上安装一个车距传感器,车距传感器持续扫描前方车辆道路,当检测到行驶道路上存在速度更慢的车辆时,自巡航系统会降低车速并控制前方车辆的间隙。当检测到行驶道路上不存在车辆时,自巡航系统将加快车速使之回到原来的速度。该系统是通过限制电机转速,从而使车辆的行驶速度固定在某一数值上,以保障老年代步车的安全性。
防盗功能也是老年代步车中不可或缺的功能之一,在老年代步车中增加一个倾角传感器也是实现防盗功能的主要手段之一。其中倾角传感器大致有三类[3],摆式传感器,利用角速度积分的传感器和多种传感器组成的复合式倾角传感器。其中摆式传感器又可以根据摆的不同而分为固体摆式跟液体摆式以及气体摆式,通常,固体摆式传感器是最常使用的倾角传感器。在该系统中选择的是利用角速度进行积分的倾角传感器[4],车辆被移动时,传感器会检测到相应的加速度与角速度,当测量的速度超过某个固定数值时,即可人为车辆被移动,从而车辆发出声音警报。
1 车载智能管理系统的组成与各功能的原理
该车载管理系统主要包括以下几部分:避障系统、自巡航系统、防盗系统。
1.1 超声波避障系统
超声波检测过程:在老年代步车的车头正中间加一个超声波避障模块,该避障模块是一个有发射器与接收器的传感器。当发射器发射出超声波被障碍物接收时,会被障碍物将声波反弹至接收器上,然后通过超声波避障模块将接收器接收到的声波传送至避障控制器进行信号的处理得到避障信号,避障信号又通过电路将信号传递至电机驱动模块使电机开始转动并且使舵机控制转向,最后将处理好的信号发送给老年代步车,使得老年代步车能得以正常的运行,最终起到避障的功能。主要是根据声音在空气中的传播速度为340m/s,时间t为发射器发射超声波到接收器接收超声波的时间差?驻t,根据S=V·?驻t/2,即可求出避障物到代步车之间的距离。
1.2 自巡航系统
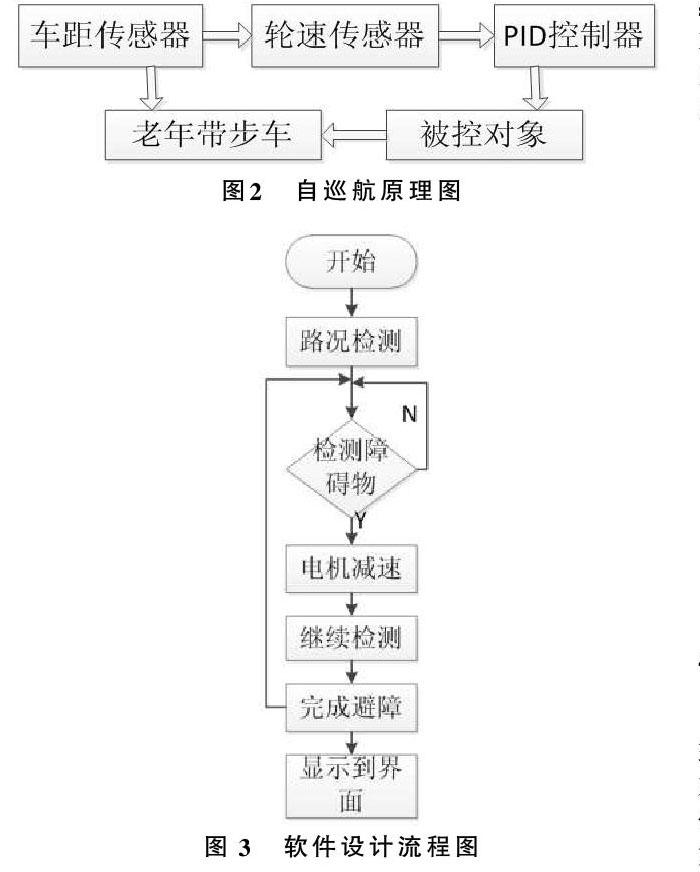
自适应巡航系统就是在老年代步车前部安装一个车距传感器,用车距传感器扫描前方的路段,同时再用轮速传感器收集信号。将信号传递给PID控制器里,然后PID控制器又将信号传递给被控对象,最后再传递给老年代步车。其中使用PID控制器是因为PID控制可以适应各种控制对象,只要参数稳定合适,即可实现无差控制,稳定性好。自巡航原理图如图2所示。
1.3 防盗系统
防盗系统是在老年代步车上安装倾角传感器,利用倾角传感器在一个系统内部虽然无法测量其速度,但是可以测量加速度,且在初速度已知的情况下,利用积分算出线速度,进而计算出直线位移,当位移达到一定的值时,就会触发蜂鸣器报警,从而起到防盗的作用。当倾角传感器静止时,即侧面跟垂直方向没有加速度作用,那么作用在其表面的就只有重力加速度。重力垂直轴与加速度传感器灵敏度之间的夹角就是倾斜角,其中倾角传感器的角度计算公式可大致记为:
2 车载智能管理系统软件设计
软件设计主要由以下几部分构成:主程序控制,轮速传感器的检测的程序,超声波避障程序,中断程序等几大部分构成,其软件流程图如图3所示。
3 车载智能管理系统测试
车载管理系统的测试结果可以在车载智能管理系统的界面上看到,界面上可以显示出路况的实物照片,以及行驶里程数。車载智能管理系统的界面是由android studio软件设计,该软件主要是用来开发各种android的游戏跟android app。运用android studio开发的车载智能管理系统,可用来显示自巡航跟避障的结果,还可实现紧急联系人的设置等,实物图如图4。
4 结语
经实验可得,在此次基于老年代步车的车载智能管理系统中,增加的超声波避障功能,自巡航与防盗功能对车载智能管理系统有着相当重要的作用,其他的实用性功能还可以继续探索跟研究,让车载智能管理系统更加完善。
【参考文献】
[1]尚建荣,黄海燕,王福杰.基于LPC1769的智能小车设计[J].微电机,2014,47(10):76-78.
[2]张萍.超声波避障智能小车的设计[J].自动化仪表,2017,38(9):40-43.
[3]张维胜.倾角传感器发展与原理[J].传感器世界,2002,8:18-21.
[4]高国伟.倾角传感器[J].传感器世界,1995,8:29-38.
[5]谷文豪,王洪亮,皮大伟,等.基于倾角传感器的坡道角度识别研究[J].河北科技大学学报,2015,36(6):566-572.