嫦娥四号着陆器定向中继链路指向及盲捕策略
2019-11-11张婷赵洋杨眉李飞
张婷 赵洋 杨眉 李飞
(北京空间飞行器总体设计部,北京 100094)
嫦娥四号任务是人类首次月球背面软着陆的探测任务[1-2],嫦娥四号探测器与中继卫星之间的中继链路是任务实施的关键环节。
嫦娥四号中继卫星位于地月L2点的平动点轨道,着陆于月球背面的着陆器与巡视器,由于受到月球遮挡,对地球处于不可见状态。上行遥控及下行遥测(科学数据)无法对地直接传输,只能通过与中继卫星之间的前/返向测控数传链路进行传输,与地面系统进行数据交互。早在20世纪70年代,Farqubar[3]就提出了发射一颗中继卫星至地月L2点Halo轨道以支持月球背面载人任务的设想;2011年,美国Artemis任务的两个航天器首次进入L1/L2平动点轨道进行探测;近年来,我国也分别在2011年的嫦娥二号扩展任务中和2014年的嫦娥五号试验星中,开展了日地系L2点和地月系L2点轨道试验。美国国家航空航天局(NASA)等航天机构也在近年开展了很多以月球或其他天体为探测目标的中继通信卫星相关工作。
中继定向通信链路是嫦娥四号着陆器对“鹊桥”中继卫星通信的关键通信链路,承担着着陆器着陆月球背面后,对中继卫星的返向数据传输任务。如何保证着陆器上定向天线对中继卫星的精确指向,以确保定向通信链路的可靠不丢失,是嫦娥四号定向中继链路设计中需要重点解决的问题。本文结合嫦娥四号月背中继通信任务需求,对中继定向通信链路天线指向控制策略及链路丢失后盲捕方案的设计和在轨验证情况进行了介绍。
1 任务分析及特点
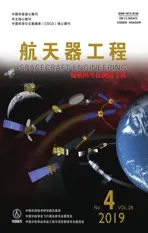
嫦娥四号任务中,探测器着陆于月球背面,不能直接对地球通信,只能通过与“鹊桥”中继卫星之间的通信链路,间接实现与地球测控站的通信。着陆月球背面后,着陆器、中继卫星及地面站之间的中继通信链路规划如图1所示[4]。
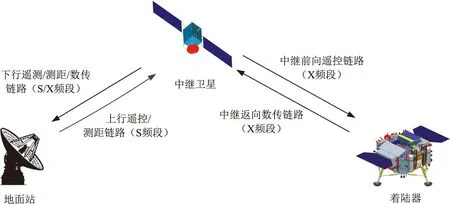
图1 嫦娥四号着陆器中继通信链路规划
在月面工作期间,着陆器通过器上全向天线接收中继卫星转发的前向遥控信号;着陆器的返向数传信号(含遥测及科学探测数据)通过着陆器的全向天线及定向天线发送,中继卫星通过星载4.2 m大口径天线接收和发送。
在嫦娥三号任务中,着陆器在月球正面着陆后,定向天线展开后即指向地球。定向天线对地指向的控制由地面根据测定轨结果进行计算,通过地面站指令或数据注入,开环控制其转动方向,以使地面站能够迅速捕获着陆器下行链路。如在对地指向过程中出现故障,则由地面结合着陆器遥测参数及地面站接收到的卫星下行信号,进行判别,并进入盲捕程序。对于盲捕过程的判定及相关操作,在嫦娥三号任务中,主要依赖于地面站频谱仪、基带等设备以及地面站操作人员进行监视及初步定位,配合进行对探测器信号的搜索捕获。
在嫦娥四号任务中,着陆器定向天线波束的指向对象为中继卫星而非地球,需结合中继卫星的运行轨道及实时位置、姿态等计算并控制着陆器天线的实时波束指向方向。在定向天线波束的指向过程中,由于着陆器本身着陆位置及姿态误差、中继卫星的轨道测量误差以及定向天线自身指向控制偏差等问题,都可能导致中继链路的丢失。同时,由于中继链路时延大,导致的中继链路捕获困难、效率低等问题,均需通过盲捕操作来实现链路的重捕获。与嫦娥三号任务中对地通信不同的是,盲捕过程中,无法及时通过地面接收设备等辅助设备进行判别及辅助操作,需通过中继卫星对定向天线信号进行捕获和识别。
2 中继链路指向概述
2.1 着陆器与中继卫星空间位置
嫦娥四号中继卫星“鹊桥”的使命轨道为地月系L2平动点轨道。地月系L2平动点位于地月连线的延长线上,距月球距离约6.5~7.9万千米。由于地月距离是变化的,L2点距离月球的距离也是变化的,变化周期和月球轨道周期一致。图2为L2点轨道示意图。L2平动点轨道始终对准月球背面,同月球一起围绕地球公转,中继轨道约14天运行一个周期,平均角速度约1(°)/h,角速度变化缓慢。
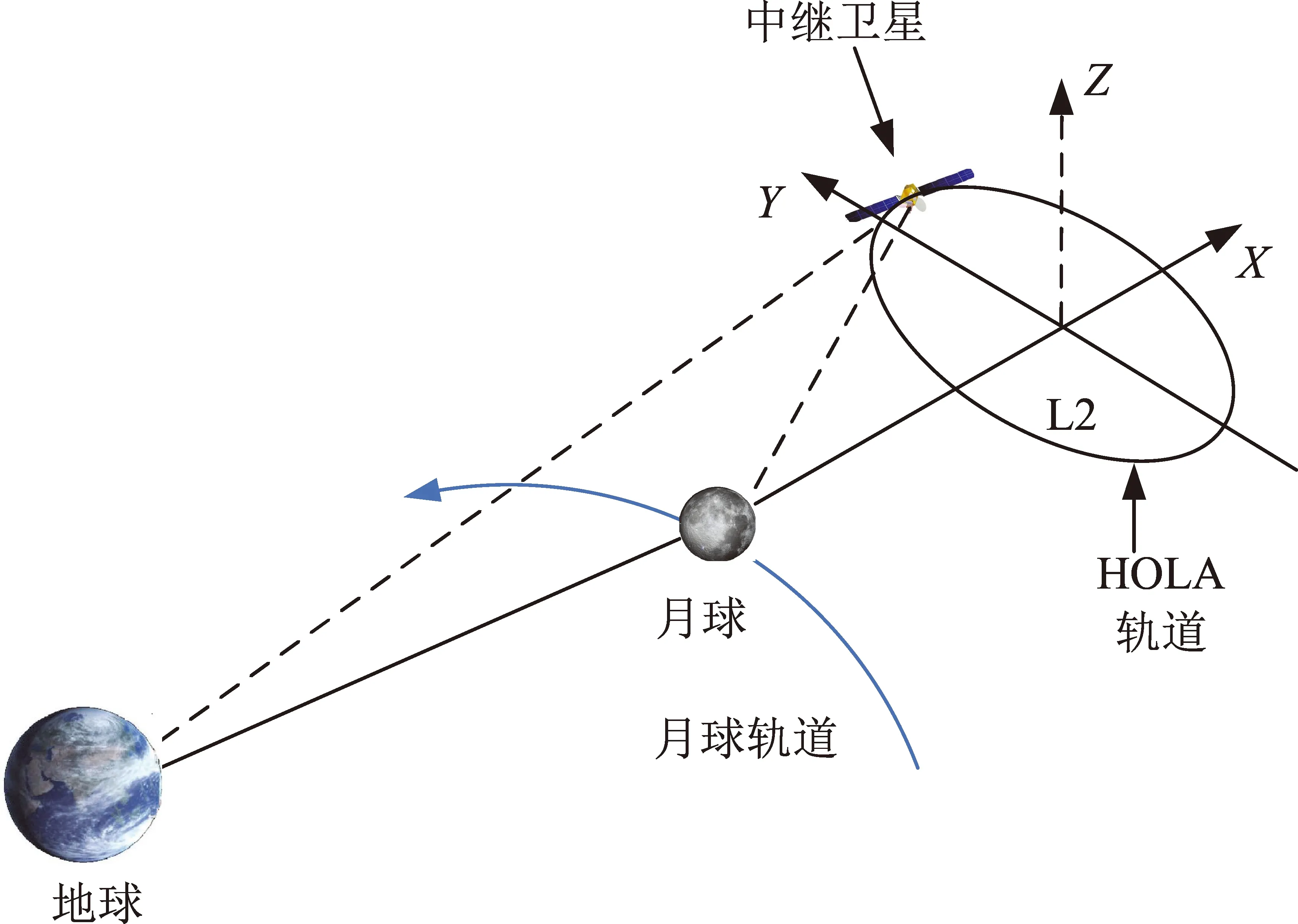
图2 中继卫星地月L2平动点轨道示意图
2.2 着陆器及中继卫星定向天线指向概述
嫦娥四号着陆器定向天线在继承嫦娥三号设计的基础上,在天线波束设计中,充分考虑了对地球站及中继卫星的覆盖性[5-6]。在中继卫星发射前,针对2018年5月、6月不同发射窗口的中继卫星轨道,综合考虑着陆姿态偏差,以及主、备着陆区的不同约束后,对着陆器指向中继卫星的在轨最大指向范围进行了计算。着陆器对中继卫星中继链路的指向范围最大出现在一个椭圆范围内,将此范围定义为定向天线的双轴转动范围。经综合分析,通过一定的指向控制策略,通过地面控制着陆器定向天线定时间隔转动,应确保能够使天线指向中继卫星。
中继卫星星载定向天线尺寸较大,天线自带驱动机构质量代价太大,因此,中继卫星定向天线不配置双轴转动机构,而是通过地面注入的轨道参数,由星上导航、制导与控制(GNC)系统进行轨道外推,调整整星姿态指向着陆器,在任务期间,确保中继卫星对月定向天线能够实时覆盖着陆器。同时也避免了复杂的定向天线捕跟系统,大大简化了中继系统的设计。
3 定向天线概述及指向精度分析
3.1 定向天线概述
嫦娥四号着陆器定向天线安装于着陆器上舱顶板,在探测器发射段、飞行段及动力下降段均处于压紧状态。着陆月球表面后,定向天线完成解锁并指向中继卫星方向[7-8]。在整个在轨任务期间,实时完成对中继卫星的捕获跟踪及实时指向,以保证期间通信链路的正常实现。
图3为定向天线在着陆器上压紧安装位置。图4为在轨“玉兔二号”巡视器所拍摄的着陆器,定向天线正在指向中继卫星方向。

图3 定向天线在着陆器上安装位置
图4 定向天线在月球背面指向中继卫星(巡视器拍摄)
3.2 天线指向精度分析
制定天线指向控制策略,必须考虑天线在指向过程中各个环节的误差,并分析这些误差对指向角度的影响[9]。在计算嫦娥四号着陆器定向天线对中继卫星的指向时,需结合两器位置误差、对天线的控制误差以及各器的时差误差等各因素进行分析及计算。着陆器对中继卫星的指向精度主要包括:着陆器及中继卫星的位置误差、测量误差、星历误差等,定向天线自身由于双轴驱动机构特性及抛物面的热特性,也存在一定的误差影响指向精度。结合本次任务,对天线指向精度进行分解说明,如图5所示,根据图5可简要分析构成误差的各部分因素。
1)测量误差对指向影响
测量误差主要包括定向天线的零位基准误差δ1(安装精测后得到)、着陆器的位置测量误差δ2(由动力下降段GNC敏感器外推信息及降落相机拍摄结果的地形匹配得到)、中继卫星的位置误差δ3(地面测定轨测量误差)以及着陆器的姿态误差δ4(GNC测量误差)等。经分解,由测量误差导致的天线对中继卫星的指向误差σ1=δ1+δ2+δ3+δ4≈1.5°。
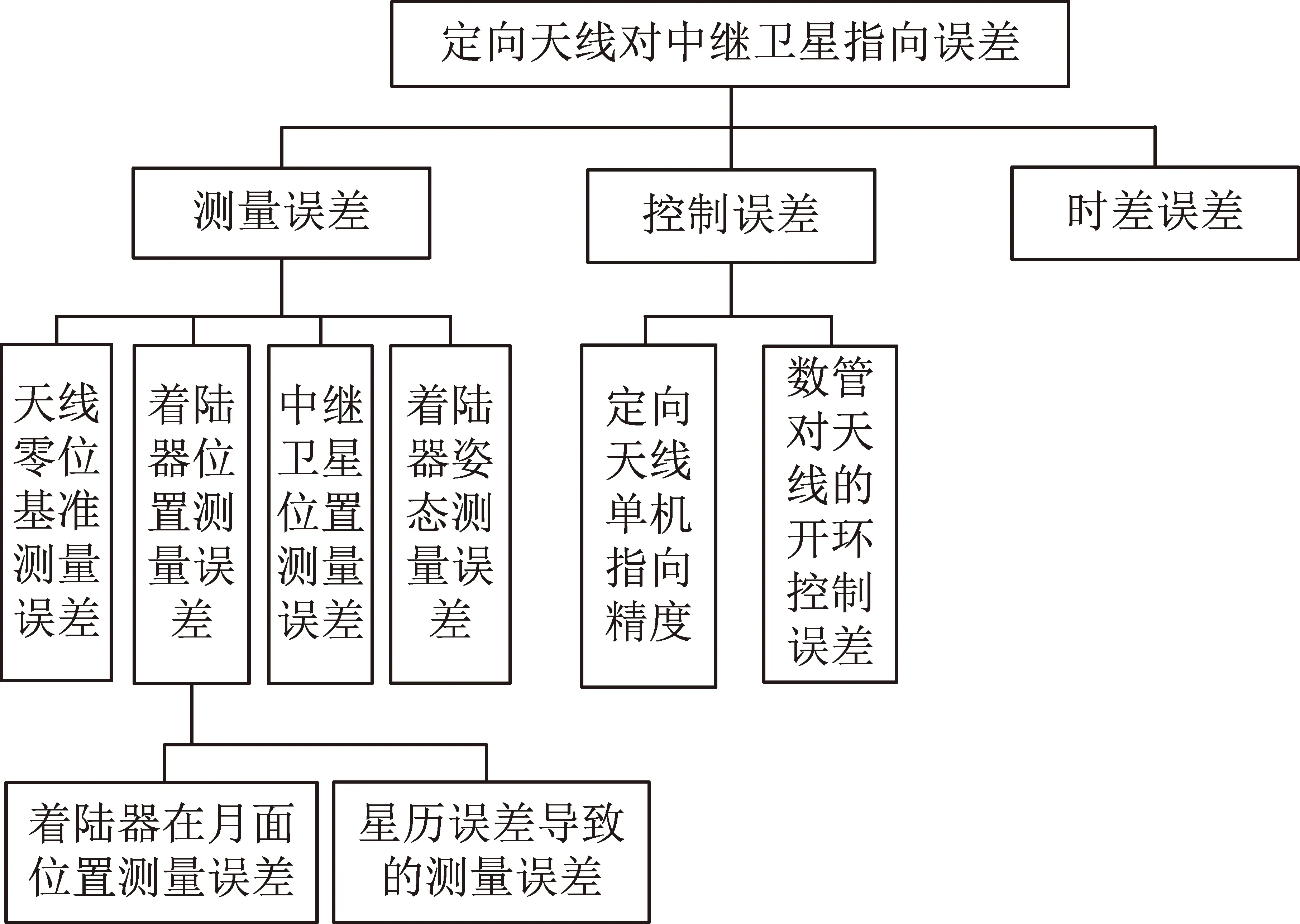
图5 定向天线对中继卫星指向误差分解图
2)控制误差对指向影响
控制误差引起的天线对中继卫星的指向误差主要包括天线单机的指向精度(含器上安装精测误差)δ1以及数管对天线转动的开环控制误差δ2。经分析,由控制误差引起的天线对中继卫星的最大指向误差σ2=δ1+δ2≈0.5°。
3)器星时差对指向影响
着陆器和中继卫星器(星)-地时间的差异,造成的指向角度误差主要取决于定向天线转动的角速度。结合着陆器主着陆区中心点及着陆标称姿态,对着陆器对中继卫星指向过程中的角速度进行了分析,结果见图6和图7。
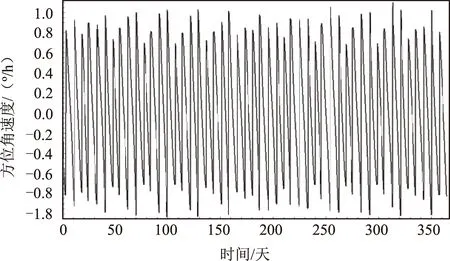
图6 天线对中继卫星指向方位角速度
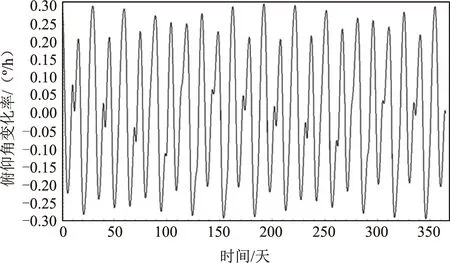
图7 天线对中继卫星指向俯仰角速度
如图6,7所示,着陆器相对中继卫星指向的方位角最大角速度约1.36(°)/h、俯仰角最大角速度约0.31(°)/h;着陆器与中继卫星均由地面进行授时,最大器(星)-地时差不大于6 s。计算可得,在最大器(星)-地时差内,中继卫星角度最大变动σ3约为0.002°。
由上述分析可知,综合各种因素,着陆器定向天线对中继卫星指向误差最大约为:σ=σ1+σ2+σ3≈1.5°+0.5°+0.002°=2.002°。即,着陆器定向天线对中继卫星指向误差最大不超过±2.1°。结合此指向误差可规划天线开环控制的指向控制策略。
4 定向天线月面工作指向及控制策略
与嫦娥三号着陆器对地通信过程不同,嫦娥四号中继卫星轨道为L2平动点轨道,幅值为X向约±1.2万千米,Y向约±3.7万千米,Z向约±1.3万千米。L2平动点轨道始终对准月球背面,同月球一起围绕地球公转。嫦娥四号着陆器对中继卫星实现通信时,中继卫星与月球距离不大于8万千米,中继卫星天线波束对着陆器和巡视器实现100%的覆盖,因此中继卫星与着陆器二者为全时段可见。在分析中,可将中继卫星视为在L2平动点轨道上的地球测控站或应用站。
4.1 月面正常捕获跟踪指向控制策略
如取主着陆区中心点,以标称姿态为例对中继卫星指向进行一年的指向分析,如图8所示。
如以上分析,着陆器定向天线对中继卫星方位角最大变化约28.5(°)/天,俯仰角最大变化约7.5(°)/天。中继轨道约14天运行一个周期,平均速度约1(°)/h,角速度变化缓慢。着陆器定向天线的波束覆盖范围为±3.5°,因此,通过地面控制着陆器定向天线定时转动,可以确保其实时指向中继卫星。
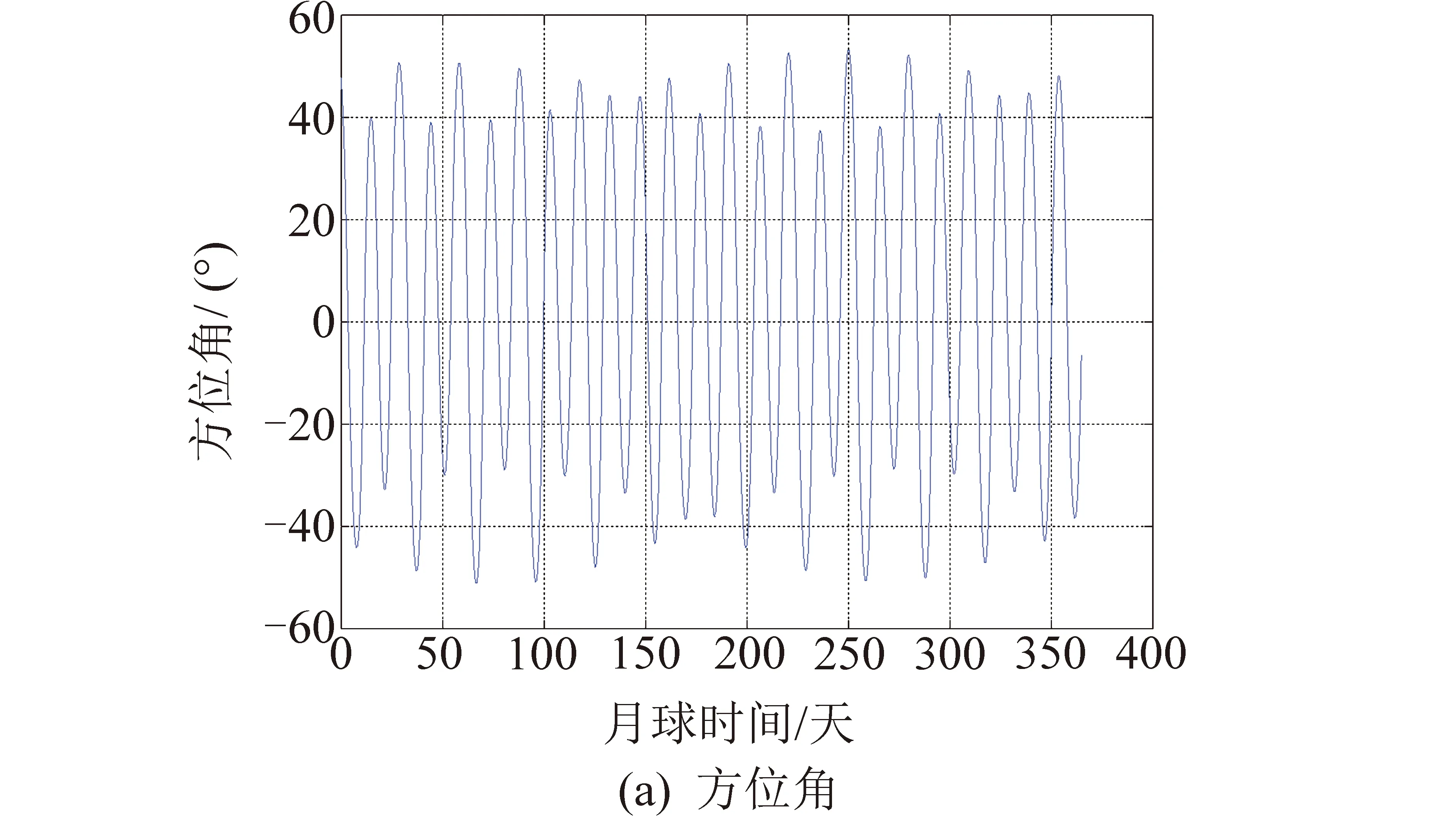
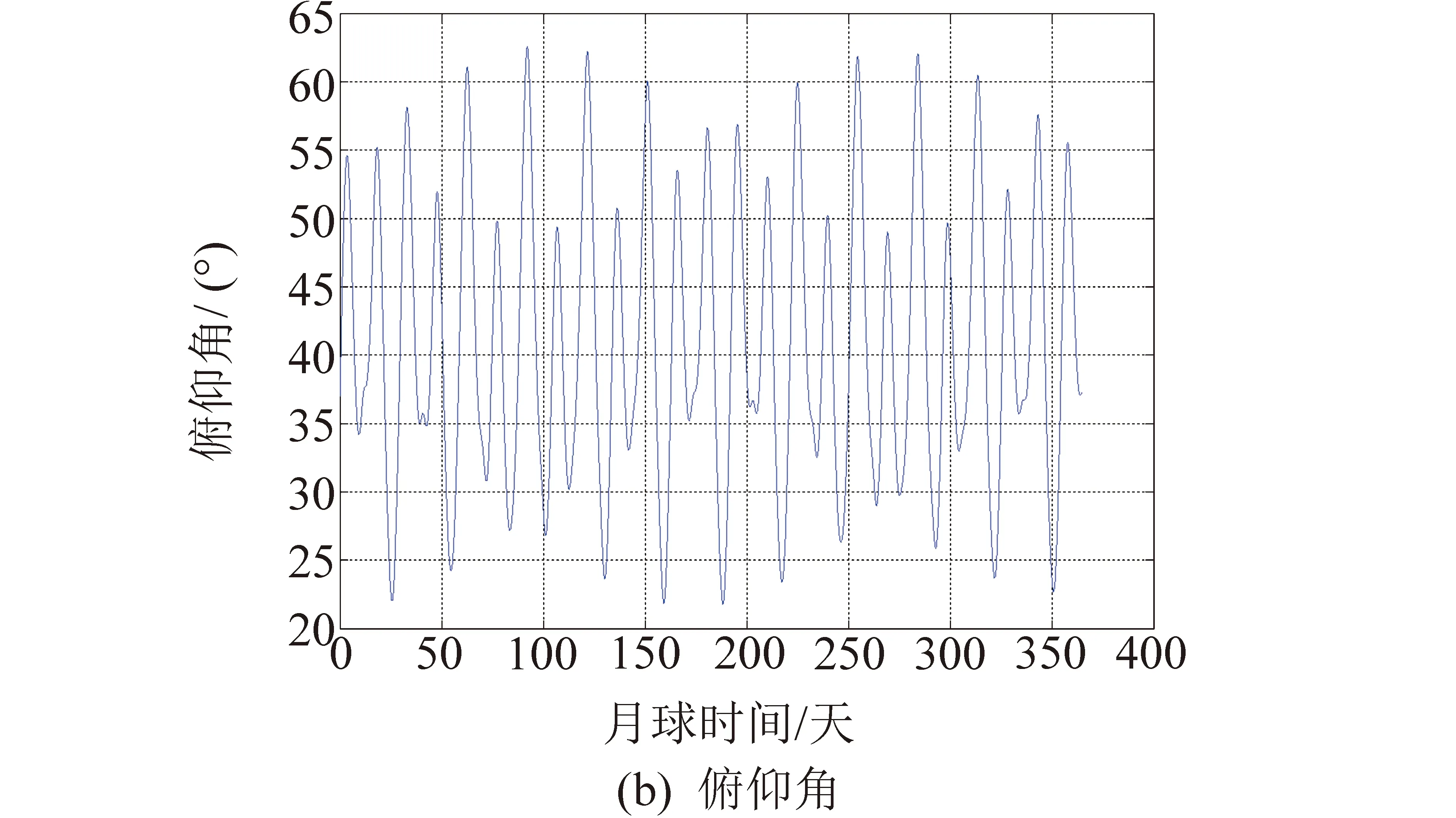
图8 定向天线对中继卫星指向角度
探测器着陆后,着陆器定向天线捕获跟踪正常程序如下。
(1)着陆器着陆后,定向天线解锁,天线驱动机构完成从压紧点到天线零位的回零操作。
(2)地面站依据中继卫星下传的着陆器的实际着陆点经纬度以及着陆器惯性姿态数据,计算着陆器——中继卫星连接矢量在着陆器机械坐标系的指向,得到定向天线反射面机械轴相对中继卫星的转动角度数据,并据此生成定向天线双轴转动控制的数据注入块[10]。地面通过数据注入发送给中继卫星并通过中继卫星与着陆器之间的全向通信链路转发后,控制天线双轴转动,建立返向通信链路。简化的计算过程为:
①结合时刻T(UTC)、着陆器机械坐标系相对着陆点当地坐标系关系、着陆点月理坐标以及定向天线当前指向位置,计算出着陆点-中继卫星矢量在月固坐标系中位置,通过坐标系转换,获得矢量在机械坐标系中位置,再通过此位置矢量计算着陆点-中继卫星矢量在着陆器机械坐标系中的方位角A1和高度角E1,从而得到本次天线需转动的角度。定向天线指向步数计算:转动步数=(下次理论角度值-当前步数计数器角度值)/0.018° (0.018°为天线双轴转动机构的步距角)。
②根据着陆器定向天线对中继卫星指向的范围,考虑定向天线中心波束指向中继卫星时,半波束可覆盖的中继卫星轨道范围进行预算,使得间隔一定时间控制定向天线波束跟随中继卫星轨道转动,确保波束中心指向着陆器-中继卫星连接矢量方向,保证对中继卫星的稳定跟踪。
③着陆器着陆月球表面后,结合中继卫星对地测控弧段进行对着陆器定向天线指向的调整。定向天线对中继卫星指向调整的原则为:依据计算结果实时控制天线指向着陆器-中继卫星矢量。由于定向天线的波束张角为±3.5°,则返向链路在指向中继卫星时随中继卫星运动可能丢失。由于着陆器定向天线对中继卫星指向误差最大不超过±2.1°(见前文分析),因此定义定向天线对中继卫星指向变化超过波束角与指向误差值的差角1.4°时,对定向天线指向进行调整。即定向天线角度指向调整原则为,地面提前计算着陆器-中继卫星持续的矢量变化,如大于1.4°,则进行定向天线指向机构的角度调整,使定向天线波束指向天线调整时刻的着陆器-中继卫星矢量指向。
4.2 在轨不同工作时段天线指向控制策略
根据以上调整时机及原则,定向天线在着陆初期第一个连续测控弧段以及后续正常工作期间,角度指向控制策略如下。
1)着陆初期第一个中继卫星对地弧段
根据嫦娥四号着陆器首发窗口标称着陆时间,着陆后连续测控弧段有将近20 h。期间着陆器定向天线需要调整约5次。因此,在着陆器着陆后,天线解锁并指向中继卫星完成中继链路建立后,随即注入24 h的天线双轴机构延时指令数据,使天线实时指向着陆器-中继卫星矢量位置。
2)探测器在轨工作段
后续实际飞控操作中,天线指向调整的策略为:每天结合中继卫星轨道计算当日着陆器-中继卫星矢量,并在每天进入中继卫星跟踪弧段后,地面注入当日天线双轴机构转动的所有延时数据注入,对定向天线角度进行调整,使得天线当日在弧段内外能够实时指向着陆器-中继卫星矢量方向。
3)天线指向调整延时数据注入需求及限制
根据估算,在着陆器的寿命周期中,着陆器相对中继卫星指向调整每日次数不等,最多一日为每小时调整1次,即24 h内需调整指向24次。因此,需考虑到着陆器每日延时数据注入的最大限制,确保延时指令注入条数不超过限制。
5 中继定向链路丢失后的盲捕策略
着陆器着陆后,定向天线转动到中继卫星位置时,如中继卫星无法捕获到天线下传信号,无法实现对着陆器数传信号的接收解调及转发,排除中继卫星接收问题后,可判断天线进入在轨盲捕模式。出现以上问题的原因主要为以下几项。
(1)着陆器着陆过程姿态控制超差,或着陆后GNC系统姿态测量设备等出现故障,无法给出着陆姿态;
(2)GNC系统给出的姿态数据偏差大,导致定向天线在轨展开后,无法准确计算天线轴线与中继卫星相对位置;
(3)天线角度传感器出现故障,天线无法归零或归零错误。
5.1 盲捕范围的确定
盲捕最大范围取决于固定窗口及已选着陆区情况下,探测器着陆后,天线相对中继卫星的指向最大范围。月面工作段影响着陆器到中继卫星指向矢量变化的因素包括:工作时间、着陆点位置、中继卫星位置以及着陆姿态偏差。
针对中继卫星确定的发射窗口,月面工作段着陆器在不同位置以标称姿态着陆,着陆器到中继卫星指向的方位角和俯仰角(即相对着陆点天西南坐标系)最大包络角度变化范围为:方位角:-54°~+67°;俯仰角:14°~64°,即可规定在盲捕中,方位角搜索范围约120°,俯仰角搜索范围约50°。在此范围内进行搜索,确保返向波束能够被中继卫星捕获。
5.2 不同指向偏差时的盲捕策略
对于目的为中继卫星的扫描搜索,其搜索范围一般应结合中继卫星轨道、深空探测器位置、姿态以及深空探测器和中继卫星的相互位置、相对运动规律等因素来确定。为减小搜索的时间和实现地面控制的简易性,在进行盲捕操作时,可分为小范围慢速扫描和大范围快速扫描模式。这两种模式主要用于使天线尽快找到中继卫星位置,进行着陆器对中继卫星的初步定位,完成遥测及数传数据下传。
5.3 小范围慢速扫描搜捕模式
小范围扫描模式主要应用于着陆器初始着陆姿态偏差误差较小,天线指向偏离范围不大的情况。
考虑到着陆器与中继卫星之间返向链路的余量以及天线波束宽度等因素,确定小范围搜索捕获的搜索范围(±θ)。以扫描起始点为中心,在此小范围内进行慢速直线扫描,设定天线转动速度为慢速转动。在搜索捕获时,采取“一步一判”的方法,即天线每转动扫描1°,控制天线停转,对中继卫星下行遥测进行判读。如遥测显示,中继接收机已锁定着陆器定向天线传输的返向信号,则控制天线停扫;如未锁定,则控制天线继续按图9的路径图扫描,直至中继接收机锁定。具体步骤如下。
(1)根据实际着陆点位置、着陆时刻、标称着陆姿态,计算标称的定向天线指向目标方位角ATX,目标俯仰角ETX。
(2)定向天线按正常工作程序完成解锁并首次归零后,指向目标方位角ATX,目标俯仰角ETX。
(3)以方位角ATX,俯仰角ETX为中心,在方位角ATX-θ~ATX+θ,俯仰角ETX-θ~ETX+θ的范围内进行粗捕。粗捕路径及过程描述为:①控制天线从位置(ATX,ETX)开始转动到(ATX+1°,ETX),转动速度为慢速;②天线停转后,监视中继卫星中继接收机锁定遥测:如遥测值显示信号已捕获,即中继卫星接收机已实现载波锁定及帧同步,可以正常接收定向天线下传的遥测及数传数据。此时可以停止盲捕流程,进入正常工作模式;③重复上述步骤①~②,天线从位置(ATX,ETX)开始转动到(ATX+θ,ETX),转动到(ATX+θ,ETX+1°)如图9中虚线所示;④重复上述路径,本次粗搜索转动到(ATX-θ,ETX-θ)结束。
如采用小范围扫描模式无法搜索到着陆器下行信号,可通过大范围快速扫描模式继续搜索信号。

图9 小范围慢速扫描模式路径示意图
5.4 大范围快速搜捕模式
大范围快速搜捕模式的目的主要用于快速发现着陆器定向天线返向信号,进行天线对中继卫星的初步定位。此扫描模式主要用于着陆器初始姿态偏差误差较大,或在小范围慢速扫描中未能搜索到目标的情况。扫描起始点选择定向天线对中继卫星指向区域的中心点位置,天线采用直线路径方式进行搜索。
1) 捕获策略
控制天线以可实现的最大转速,在中继卫星相对于着陆器指向的可能范围内进行快速扫描搜索,由于天线转速较快,因此能够在较短时间内完成对整个波束可能覆盖范围的扫描。(波束所有可能覆盖范围定义为(ΦA,ΦB),由标称着陆点位置、着陆时刻,着陆姿态以及中继卫星在整个任务期间的轨道决定)
大范围快速扫描模式的搜索扫描角度覆盖了着陆器对中继卫星指向的所有范围。在扫描过程中,采用快速扫描模式找到中继卫星大致方向后(中继接收机载波锁定),需回到慢速扫描模式,直到中继卫星中继接收机锁定,遥测正常下传为止。扫描路径示意如图10所示。
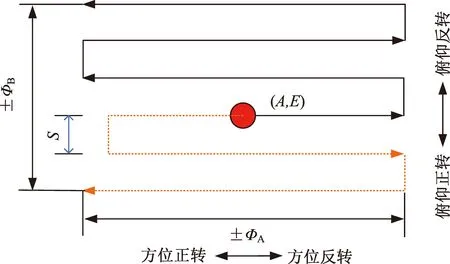
图10 大范围快速扫描路径示意图
2) 捕获流程
(1)定向天线按正常程序完成解锁并首次归零后,控制定向天线指向目标方位角ATX,目标俯仰角ETX。
(2)以方位角ATX,俯仰角ETX为中心,方位角ATX-ΦA~ATX+ΦA,俯仰角ETX-ΦB~ETX+ΦB进行粗捕。粗捕路径及过程如下:①控制天线从位置(ATX,ETX)开始转动到(ATX+ΦA,ETX),转动速度为快速转动,如图10中虚线所示;②从(ATX+ΦA,ETX),转动到(ATX+ΦA,ETX+S),如图10中虚线所示;(S为步长,步长的选择可按照扫描范围确定);③从(ATX+ΦA,ETX+S),转动到(ATX-ΦA,ETX+S);④重复上述路径,本次粗搜索转动到(ATX-ΦA,ETX+ΦB)结束。
(3)在上述天线单次转动过程中,对中继卫星下行遥测进行监视,在发现接收机锁定后,停扫,并判断粗捕结束。
与嫦娥三号着陆器盲捕操作相比,定向通信链路由对地改为对中继卫星,盲捕过程的实时判决缺少地面站的参与,因此需要通过对中继卫星的相关遥测量进行判决后再进行下一步规划,降低了处置的实时性,同时也增加了盲捕策略的复杂度。
6 在轨实际验证情况
嫦娥四号探测器于2019年1月3日着陆于月球背面后,定向天线顺利完成电爆解锁释放,双轴驱动机构完成展开归零,到达零位后再按照地面控制指令转动到中继卫星方向,建立返向中继链路。从落月后,定向天线双轴回零,到完成平台在轨交付用户(截止至2019年2月1日20点),根据本文中所制定的天线指向控制策略,通过指令控制定向天线对中继卫星进行指向,期间机构最快每隔约3 h左右调整一次,最慢每隔约5 h左右调整一次,定向天线双轴共计对中继卫星指向69次,指向准确,星间链路工作正常。完成在轨交付至今的在轨试验中,着陆器定向天线对中继卫星指向正常,未出现中继链路丢失现象。
7 结束语
在首次地月L2点中继通信任务中,结合任务特点,制定了嫦娥四号着陆器对中继卫星指向的天线控制策略及盲捕策略。根据定向天线对中继卫星的在轨指向结果及中继数传链路的工作状态,表明定向天线指向控制方案正确、指向策略合理、验证充分,有效保证了嫦娥四号着陆器与中继卫星的中继通信链路的畅通,圆满支持了嫦娥四号探测器中继通信任务。同时,本文提出的天线控制策略及盲捕策略也可为后续深空探测任务中天线指向控制策略的设计与验证提供了参考。