基于RFID技术的室内定位算法研究
2019-10-30樊晓曦王艺霖江翰峰张国平
樊晓曦 王艺霖 江翰峰 张国平

摘要:在本研究中为深入分析并提高室内定位系统的功能,在本节中设计了主动射频识别技术,将其应用于室内环境低成本定位仿真分析,通过引入仿真算法,参考标签辅助定位,由于布局导致接收信号不同对定位电子标签完成距离和方向进行预测,阐述了该系统的具体布局方式,针对不同方式对系统产生的定位精度开展仿真分析,结合仿真结果表明选取适合企业生产车间,人员定位的有效方案,利用该方案能够显著提高室内定位精确度,并降低整个定位系统成本具有较强的实用价值。
关键字:RFID;室内定位;算法;研究
近年来随着科学技术的发展,室内目标定位具有十分重要的作用,在本研究中针对某企业生产车间人员定位系统进行研究设计,在日常生产中利用该系统能够为企业提供人员考勤管理并有效实现生产指挥,一旦发现安全事故时,能够及时为抢险救灾提供保障,在室内环境下信息携带功能应用最广,传输可靠射频识别技术,射频识别技术定位系统是通过标签对物品的唯一识别性能,通过读卡器接收的电子标签信号来获得具体的定位信息。目前针对室内定位控系统其定位误差通常在1.2米左右的范围,其中射频识别技术的定位误差可达到一米以内,这种射频识别系统具有良好的可拓展性,适用于处理复杂环境,但该系统也会面临硬件设备成本高,耗时较长,定位精度很容易受到标签密度分布和形状的影响,因此对其使用范围受到一定程度约束。基于目前现有室内定位算法的不足之处的研究,提出了接受信号强度室内定位算法,利用多屏读卡器和转发读卡器指令标签信号进行定位,相比传统的定位算法来说这种算法所使用的读写器较少,而且标签较少,能够提高定位精度,降低企业的运营成本以及降低系统现场布局难度,通过组合方式扩大定位区域,能够弥补传统定位系统的不足之处。
1定位方法分析
常见的定位方法包括基于信号到达角定位,接受信号强度定位,信号到达时间定位等,由于室内环境被视距传输,多径传输效应的存在,导致信号到达接收端存在一定程度的时延和不同入射角。信号到达时间和信号到达角这两种定位方式在室内空间存在不可预测误差和高精度时钟、硬件设备成本较高等问题,相比信号强度定位方法检测设备比较简单,通过多次测量平均值来提高最终信号强度检测的精确度,以降低遮蔽和多径效应的不良影响,也是目前室内空间定位的主要研究方向,因此在本研究中采用基于信号强度这种方法进行定位系统的研究。
2构建系统模型
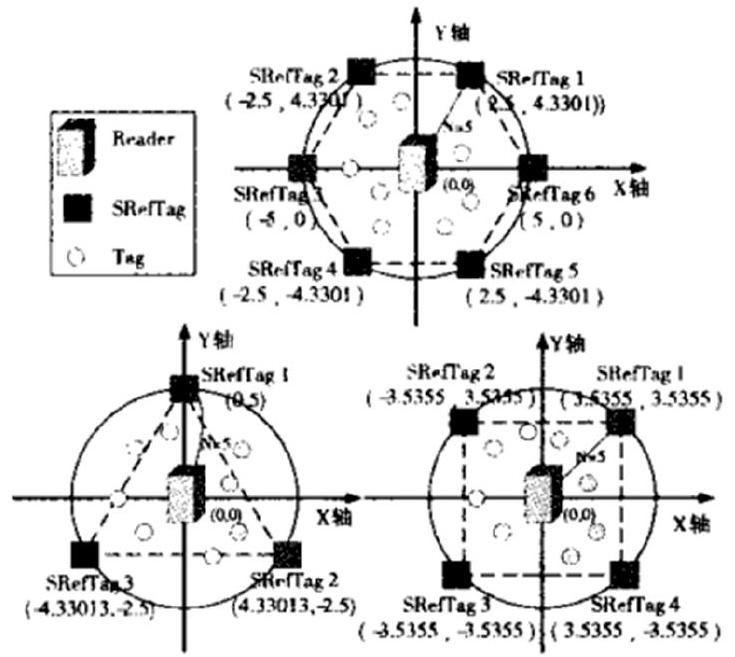
定位系统在布局上需要引入参考点,即使用参考标签完成辅助定位,这些标签能够实现转发读卡器信号的功能,结合布局情况和信号接收强度,对电子标签完成位置估计,整个定位系统的构建包括读卡器,参考标签,待定位标签。具体来看读卡器可以使用多屏读卡器用于发送不同强度的射频信号,最大信号强度为fullpower,最远距离为n米,指定参考标签并完成标签转发动作,参考标签的位置是固定的,其功率是sREFtgPw可传输距离最高为m米,能夠具备读卡器传输指令转发的功能。待定位标签其功率为tagpw可传输距离为n米,具体的系统布局如下所示,分别存在三、四、六个参考标签数目。
在平面中间放置读卡器,读卡器和参考坐标的具体位置信息是一致的,在距离一层读卡器n米位置均匀分布参考标签,参考标签的数目可以是三,四,六个等,可以假设n个待测定标签位于半径为n的区域内。
收集定位系统的信息.在信息收集过程中具体流程如下:第一需要以最大功率由读卡器对待定位标签,参考标签进行信号的发射,并准确记录被识别的定位标签;第2步参考标签按照顺序转发读卡器的信号指令,并准确记录每个参考标签信号被哪些在定位标签所接收;第3步需要改变读卡器信号传输的功率准确定位哪些已经被识别的定位标签;第4步重复上述步骤。
3具体定位算法的实现分析
可以通过两种信号确定在定位标签的位置,包括位于参考标签的传输范围内,以及能够被读卡器发送的辅助信号识别,由于在定位系统中参考标签的位置是固定的,由读卡器所发送的辅助信号功率是根据环境不断变化的,因此在本研究中算法可以根据参考标签和待定标签的位置进行细化。假设读卡器发送辅助信号功率分别为power a和b,则power可以表示读卡器发送功率power信号强度时能够达到的最远距离,且power a低于power b且小于等于fullpower。在定位标签位于0个参考标签范围内,结合读卡器所读取的待定的标签信号强度,进而判断该位置的远近,但在信号获取中无明显的方向信息,且在这种情况下需要待定位标签位置及读卡器位置存在下列公式,
该公式中(Reader-X,Reader-Y)表示处于平面中间的读卡器坐标。
如果待定位标签有一个位于参考标签范围内,且待定位标签位于读卡器和窗口标签的连线位置与参考系的区域,需要结合信号功率强度进行计算。绑定该定位标签在读卡器发送的辅助信号a和b之间,那么待定位标签的位置可以用下列公式表示
当待定位标签位于power a的范围内,那么最终带定位标签的位置信号可以用下列公式表示
最终带定位标签的方程如下
如果待定为标签在两个参考标签的范围内,待定位标签在读卡器和两个参考标签连线位置的垂线直线上,且与读卡器距离为dis。当定义标签位于a和b辅助信号范围内,则与读卡器的距离如下
当待定位标签位于a辅助信号范围内,那么其与读卡器之间的距离可以用下列公式表示
通过上述公式能够计算待定位标签的位置存在两个目标解,其距离参考标签较近的可作为最终真值。
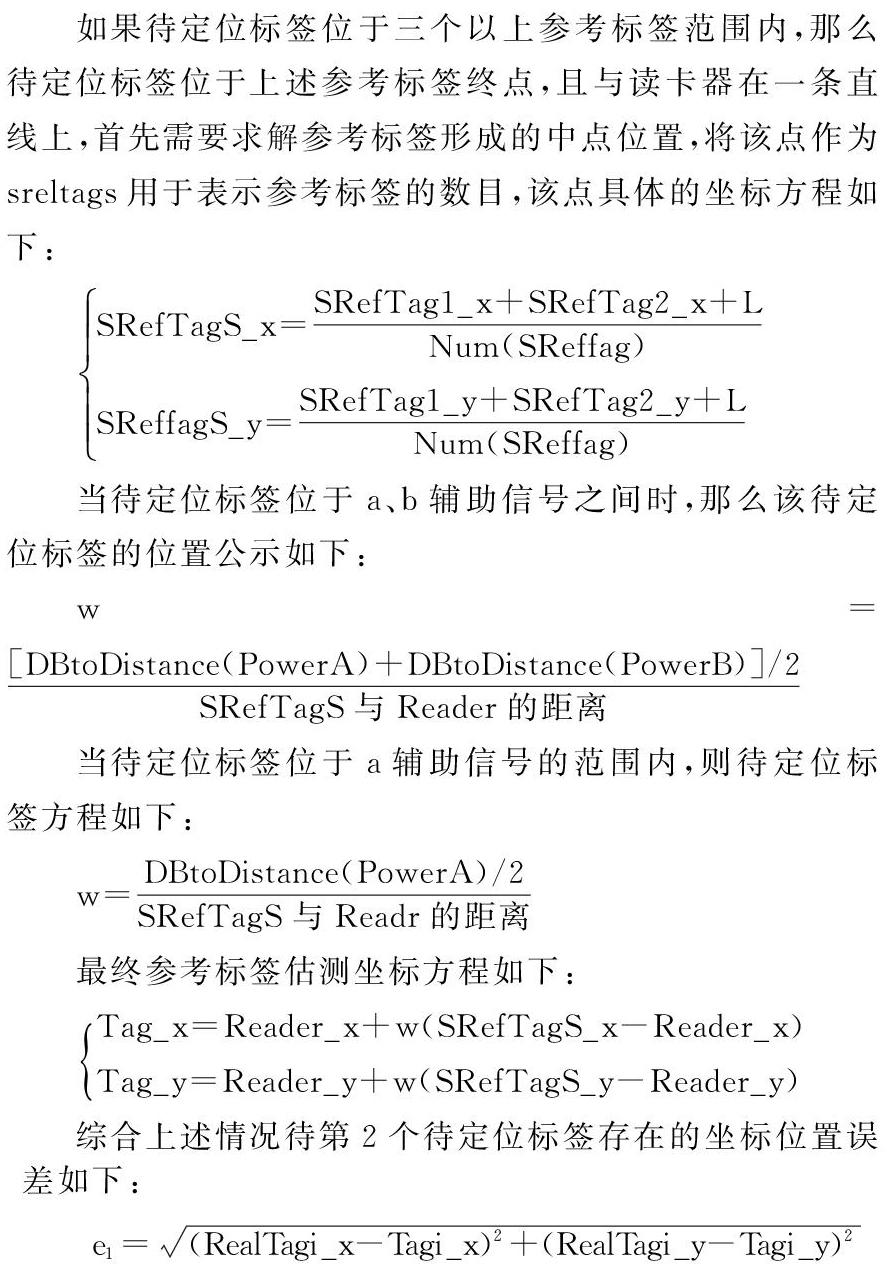
如果待定位标签位于三个以上参考标签范围内,那么待定位标签位于上述参考标签终点,且与读卡器在一条直线上,首先需要求解参考标签形成的中点位置,将该点作为sreltags用于表示参考标签的数目,该点具体的坐标方程如下
当待定位标签位于a、b辅助信号之间时,那么该待定位标签的位置公示如下,
当待定位标签位于a辅助信号的范围内,则待定位标签方程如下
最终参考标签估测坐标方程如下
综合上述情况待第2个待定位标签存在的坐标位置误差如下
在上述公式中(RealTagi-X,RealTagi-Y)表示第i个待定位标签的真实距离,其表示第i个待定位标签计算距离,n是指待定位标签的数目
4仿真分析
在具体实验过程中,假设读卡器能够识别的圆形区域中任取400个点,作为样点和待定位标签的真实坐标,具体的模型布局如下所示:在仿真过程中设置参数假设读卡器和参考标签距离为5米,参考标签最大传输功率为18.77dbm,读卡器发送两层辅助功率时,第1层功率为18.77dbm,第2层为11.555dbm,当读卡器发送第3层辅助功率时第1层功率为18.77dbm,第2层为14.54dbm,第3层为7.32dbm,功率和距离等具体关系如下公式所示,
在上述公式中距离可用D表示,单位为米,距离地和传输功率关系可以用DBTodIstance表示其单位为dbm,结合系统参数变化能够对平均定位误差分析,找到更高的精度。
在分析辅助功率对整个系统定位误差产生的影响时,当读卡器发送2层辅助功率时,由于第1层辅助信号是不变的,需要改变第2种信号功率,实际能够处于0~18.77.5之间,当读卡器数目变化时,进而会改变读卡器第2层辅助功率对误差产生的影响。根据仿真结果发现,给定义参考标签数目之后定位模型误差会缩小,第2层辅助信号功率逐渐发生变化,当辅助功率在10 dbm时平均误差最小,而当读卡器达到第3层辅助功率时,第1、第2层信号功率是不变的,逐渐改变第3层的信号功率使其能够在0~14.54.5之间,分析对系统平均误差的影响,第1,第3层信号功率不变,改变第2层辅助信号功率,使其能够在7.32和18.77dbm之间进行变化,分析对其对于性统误差产生的影响。通过仿真结果发现,逐渐改变读卡器发送辅助工具信号强度对平均误差会产生影响,当第2层幅度信号功率处于14dbm时,其最终产生对系统产生的平均误差较小,让第3层信号强度在8dem左右时,此时对于系统平均误差产生的影响是最小的。通过比较发现,当读卡器辅助功率由第2直接升到第3层时,此时模型对系统产生的平均误差有一定程度影响,但如果仅增加辅助功率层数,则无法减少定位误差,但同时设置较多的辅助功率层数时也会很难计算坐标位置,且整个处理过程中难度较高。
分析参考标签的数目对系统误差产生的影响,通过模型结构我们可以发现该模型误差和使用参考标签数目是呈现反比例关系的,当参考标签数目由3个逐渐增加到4个,会降低对系统平均误差的影响,而当参考标签的数目由4个就是增加到6个,会使对系统平均误差的变化逐渐减慢。通过实验可以发现,如果仅增加参考编辑数目时,对于系统定位精确度的变化较小影响较小,而如果设置较多的参考标准数目是会增加计算难度,同时对于实时定位处理来说也是不利的。
参考标签的距离对系统产生平均误差的影响,由于系统布局和读卡器发送两层辅助信号的功率是固定的,在整个系统中使用4个参考标签,其最大承受功率在10~22.5之间,最大传输范围也会发生变化。通过仿真结果发现,当读卡器和参考标签的距离为5米时,此时在18dbm的范围内,其产生的平均误差较小,当读卡器和参考标签的距离为4米时,在16 dbm时读卡器产生的平均误差最小,参考标签最大传输功率对整个系统平均误差有显著影响,当读卡器和参考标签的距离最小时,最终平均误差达到最小所需的功率也是比较小的。
参考标签的具体位置对于平均误差产生的影响,结合由于读卡器发送两层辅助信号位置和系统布局形式是固定的设置,4个参考标签数目,逐渐改变参考标签和读卡器之间的距离,分析这种情况下对于平均误差产生的影响,结果可以发现当参考标签和读卡器的距离在1-9米之间进行变化时,其最终定位系统平均误差也会逐渐发生变化,但通过仿真发现两者之间的距离并不是越小越好,而在5米范围内此时能够是平均误差达到最小值。
扩大算法的范围分析。针对上述构建的模型定位系统面积越小,在實际使用过程中是难以存在的,为提高系统的应用性,可以在使用较小资源下获得较高精确度,增加系统覆盖面积,可以提高参考标签和读卡器传输工具,并将参考标签和读卡器的距离增加。比如当读卡器发送2层辅助信号功率固定时,相对应的读卡器和参考标签传输距离范围对整个系统平均误差产生的影响,可以发现当两者之间传输距离较大时,也会相应的增加系统平均误差。为解决这种问题,可以采用细胞组合的方式,由一个读卡器配备多个参考标签作为基本单元,该基本单元布局可以进行组合,进而扩大整体的覆盖范围,采用这种细胞组合方法可以提高系统的定位精确度,减少所使用的参考标签数目,适用于大范围的定位。
小结
在本研究中设计了主动射频识别技术的低成本定位仿真算法,利用该方法能够提高室内定位系统的性能。
参考文献
[1]王小辉, 田磊. 基于RFID技术的三维定位算法研究[J]. 电子设计工程, 2017, 25(06):136-139.
[2]尹强. 基于RSSI的RFID室内定位方法研究[D]. 2017.
作者简介:
1.樊晓曦,男,汉族,中国石油大学(华东),计算机科学与技术学院本科在读
2. 王艺霖 男 汉族 1999年3月 山东潍坊人 本科学历 中国石油大学华东在校生
3. 江翰锋,男,汉族,1999年2月,河南新乡人。本科学历 中国石油大学华东在校生
4.通讯作者为 张国平 ,张国平,1992年石油大学(华东)计算机应用技术专业毕业留校任教,1998年晋升为讲师,2001年石油大学(华东)计算机应用技术专业研究生毕业,2003晋升为副教授。工作期间主要参加计算机专业的教学和科研工作,先后主讲了《操作系统原理》,《数据库原理》,《面向对象程序设计——Java语言》,《Web数据库》,《Unix系统环境》,《软件工程》,《面向对象方法》,《UML语言》,《软件设计实例分析》等多门计算机本科、研究生课程。现从事的主要研究方向有:信息系统与信息集成技术、数据库与数据网格。[1]
