水中无人作战平台发展现状与趋势分析
2019-10-30杜方键张永峰张志正高琳田明
杜方键 张永峰 张志正 高琳 田明

摘 要:以水中无人作战平台为核心的海上無人作战系统,具备高强度可重复执行高风险作战任务的能力,正在快速成长为一支强大的海战场作战力量,倍受各国海军关注。文章重点从无人水下航行器(UUV)与无人水面艇(USV)两个方面对水中无人作战平台的发展现状进行了详细介绍,分析了水中无人作战平台的发展趋势并给出未来发展建议。
关键词:无人作战;UUV;USV
中图分类号:TP242.6 文献标志码:A 文章编号:2095-2945(2019)27-0006-05
Abstract: The marine unmanned combat system, with the underwater unmanned combat platform as the core, has the ability to perform high-intensity and repeatable high-risk combat missions, and is rapidly growing into a powerful naval battlefield combat force, which has attracted the attention of navies all over the world. In this paper, the development status of underwater unmanned combat platform is introduced in detail from two aspects of unmanned underwater vehicle(UUV) and unmanned surface vehicle (USV), and the development trend of underwater unmanned combat platform is analyzed and some suggestions for future development are given.
Keywords: unmanned combat; UUV; USV
引言
军事科学技术日新月异的发展,在军事领域引发了一系列革命性的变化,武器装备的发展呈现出信息化、精确化、隐身化和无人化等特点。无人作战平台由于其便于执行艰险任务,降低人员战场威胁等诸多优点,被广泛研制并投入实战应用,进一步指导和促进了无人作战平台的研制与技术的开发。相较于空中与地面作战,水面/水下作战的危险性与困难程度更大,海上无人作战系统的建设在面临严重水下威胁的我国显得尤为紧迫。
海上无人作战系统是无人作战系统发展的重要方向,美国国防部(DoD)在最新版(2013版)《无人系统(一体化)路线图》[1,2]中给出海上无人系统定义:“海上无人系统(UMS)包括无人海上航行器(UMV)、所必需的支援保障设备,以及完成任务所需的完全集成的传感器和有效载荷,其中UMVs包括无人水面艇(USV,Unmanned surface vehicle)和无人水下航行器(UUV,Unmanned underwater vehicle)”。本文论述的海上无人作战系统是指由水中无人作战平台、作战任务载荷及通信指挥网络组成的综合化作战系统,是信息化战争中夺取水面/水下信息优势、实施精确打击、完成特殊作战任务的重要手段。
随着中国海洋国防战略由近海防御向远海防卫转变,中国海军正在加速转型为远洋海军,为应对现实和可能出现的威胁,满足国家战略利益空间拓展、国家安全和经济发展的需要,中国需大力加强无人水下航行器[3](UUV)、无人水面艇[4](USV)等水中无人作战平台的研制力度,推进海上无人作战系统的建设发展,提升中国海军准确、安全、快速遂行军事任务的能力。
1 发展现状
海上无人作战系统的设计可以忽略乘员的需求,其组成部分具有体积更小、重量更轻、航时更长、机动性更强、隐身性更好、生存能力更强等诸多优点,因此系统作战效能更高,倍受各海洋军事强国关注。水中无人作战平台是海上无人作战系统的最主要组成部分,主要包括无人水下航行器(UUV),无人水面艇(USV)等。
1.1 无人水下航行器国内外现状
世界各军事强国对无人水下航行器的发展极其重视,美国和欧洲已研发出多种军用UUV[3,5,6],亚太地区的新加坡和日本等国同样热衷发展此类技术,其中以美国研发平台最多,技术也最先进,表1给出了美国开发的部分军用UUV概况。
除美国外,俄罗斯研制有用于搜索核潜艇的MT-88型和“泰菲络纳斯”型UUV,法国国家海洋开发中心研制有用于深海资源勘探的“逆戟鲸”号UUV,英国BEA系统公司研发的Tailsman型、挪威康斯伯格公司研发的Hugin-1000型、瑞典萨博水下系统公司研发的AUV62MR型、新加坡海军“梅雷迪思”型等UUV可以完成情报侦察、反水雷等工作。
从表1中可以看出,1000m以上的浅海海域是大多数UUV的主要作战区域,主要原因是多数UUV针对的作战对象主要集中在浅海海域,如敌方水面舰艇、潜艇、水雷等,浅海作战UUV的直径大多在533mm以下,任务载荷较少,作战应用简单,重点突出隐蔽机动作战能力,多执行防区渗透侦察、对潜跟踪探测、扫/反水雷作战等军事任务;深海作战UUV的直径大多在533mm以上,载荷类型多样,重点突出多任务载荷搭载、多功能应用能力,多执行深海目标探测、深海设施破坏、监听网络部署、深海救援等作战任务。
对表1中UUV性能参数进行对比分析,能够较为准确反映UUV作战能力并以较为明显的区分界限描述UUV类型的性能参数就是UUV的直径,最为明显的就是Bluefin-9、Bluefin-12、Bluefin-21系列与REMUS-100、REMUS-600、REMUS-6000系统,利用直径可以对上述UUV进行准确的型号划分,而其他参数不具有类似区分能力。
2000~2004年间发布的2版《美海军UUV總体规划》[2,7,8]中将UUV分为便携式(11~45kg)、轻型(324mm口径,约230kg)、重型(533mm口径,约1400kg,潜艇发射)、大型(约10t,水面舰或核潜艇投放)四类。这种分级方式受到国际现行鱼雷标准口径影响较大,由表1中可以看出,多数UUV采用324mm与533mm口径,可以充分利用324mm轻型鱼雷和533mm重型鱼雷的发射装置和建制保障装备,迅速形成装备规模和战斗力。但这种分级方式存在两个问题:(1)混合采用口径和重量2个物理量作为分级依据,各级间界限不清晰,实际应用中会引起一些争议和混乱;(2)基于鱼雷标准口径分级忽视了垂直发射管、干湿遮蔽舱、艇体等发射途径,已不能适应UUV产品谱系的不断扩充。因此,美海军在2016年提出了新的更科学更合理的UUV分类和分级方法。
美国海军在2016年呈国会的《2025年UUV需求》[2,9]报告中将UUV分为自推进UUV、环境驱动UUV和其他系统3大类。其中自推进UUV分为4个级别:(1)超大型UUV,直径大于2133mm,利用起吊装置等操作设备从岸基或船上发射;(2)大型UUV,直径533~2133mm,可从干式甲板坞舱(水平安装潜艇背部)、潜艇载荷发射管(2210mm口径垂直发射管)、以及合适的水面舰船上布放;(3)中型UUV,直径254~533mm,可从潜用鱼雷发射管、垂直发射管或逃生舱中发射;(4)小型UUV,直径76~254mm,可由各类平台甚至较大的无人海上航行器发射,潜艇上可从装填发射器、垃圾处理装置、逃生舱、水声对抗器材发射器和指挥台围壳内的通用模块化桅杆底座中发射,水面舰船一般从舷边布放与回收小型UUV,而潜艇一般仅发射而不回收。环境驱动UUV分为2类:(1)浮力滑翔器,借助固定翼将浮力变化转化为前进动力,推进速度一般为1~2kn,携带的能源主要用于支持各类传感器与通信载荷的长期工作,可从小艇/刚性充气艇上发射与回收;(2)波浪滑翔器,将类似冲浪板的水面浮体通过脐带缆与水下数米带有一组小翼的滑翔器相连,利用小翼将波浪运动转化为推进动力,速度1~2kn,浮体表面的太阳能板可为滑翔器电池充电,续航力可达数月,可由岸基或舰船布放和回收。
新的分级方法基于装备现状并面向军事应用,明确给出了各级别的直径范围和可采用的发射方式(水声对抗器材、通海抛物口、逃生舱、鱼雷发射管、垂直发射管、背驼式坞舱等),消除了因分级界限不明和口径分级局限而产生的表述混乱、覆盖不全的问题,更有利于军用UUV成为建制装备,快速形成战斗力。对于少数异型UUV,如Manta、STDV、XRay等,可以选取合适的外形特征参数和折算方法划入对应级别。采用最新UUV分类方法,表1中Slocum与Sea Glider属于浮力滑翔器,其余属于自推进UUV,依据直径或折算参数可将自推进UUV划分至相应级别,分级方式科学合理,清晰明确。
我国在无人水下航行器研发方面起步较晚,但也取得一些研究成果,先后研制了多型UUV[10],具备较强的军事应用潜力,表2给出了我国研发的部分UUV概况。
从表2中可以看出,我国无人水下航行器存在口径规格不统一,搭载布放方式单一(多为水面船布放回收)、多功能应用能力不足等问题,UUV的发展缺乏长期连续的国家总体规划指导,急需在国家层面制定符合我国国情与军事应用需求的我军UUV总体规划,制定科学合理的技术框架与发展路线,深入研究UUV的任务使命,拓展任务领域,实现我国军用UUV的统一高效发展。
1.2 无人水面艇国内外现状
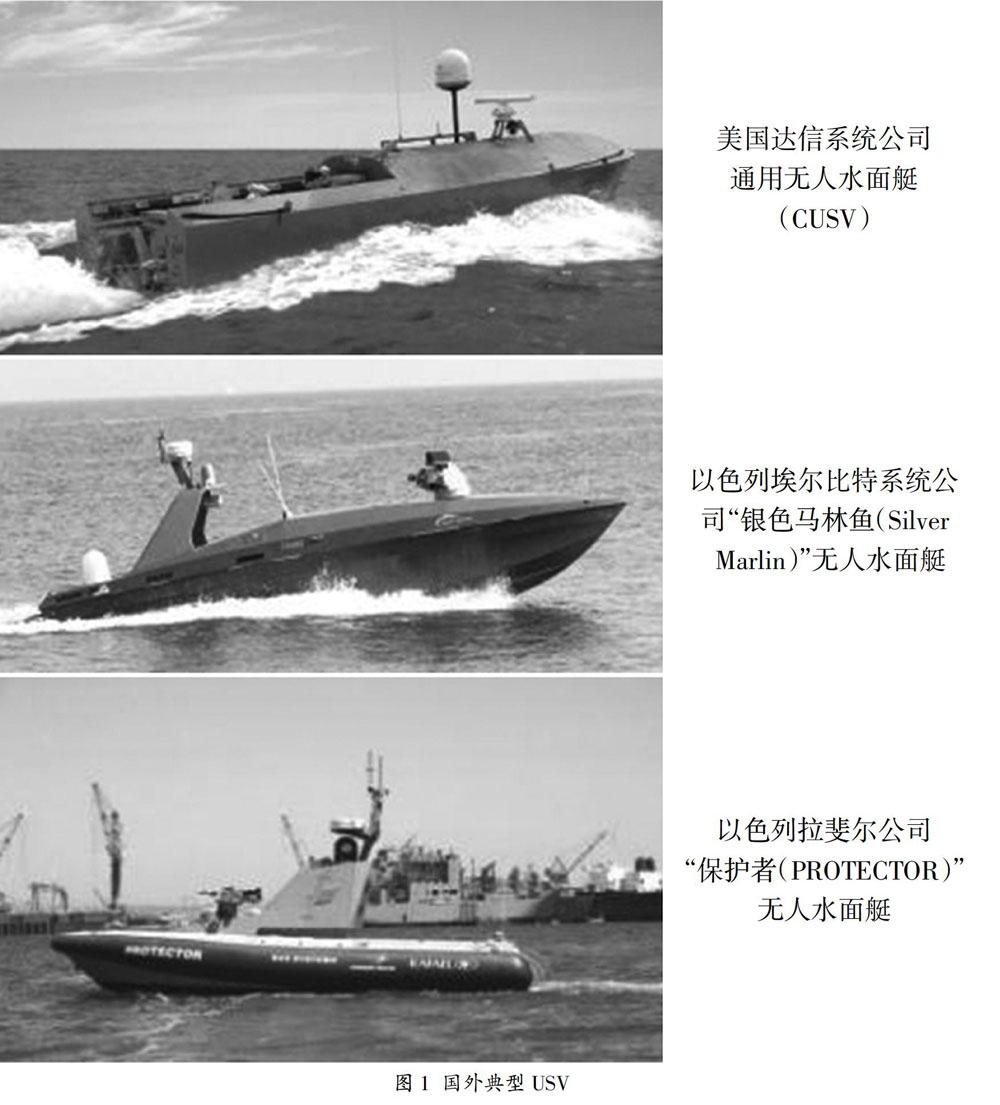
出于保护人身安全的目的,无人水面艇在执行扫雷、侦察等危险系数高的任务时具有很大的优势,作为有人近海作战舰艇的有效补充,已受到各国海军的重视,但迄今为止,只有美国和以色列在USV的开发上取得了实质性进展,典型USV如图1所示。
美国海军于2007年发布的《USV主计划》[4,11]加快了无人水面艇的发展,重点拓展USV反水雷战、反潜作战、海上安全、水面作战、支持特种部队作战、电子战和海上拦截作战等任务领域。
2011年,美国国防高级技术研究局(DARPA)将超长航时无人艇(ELEUSV)更名为反潜持续跟踪无人艇[12,13](ACTUV,ASW Continuous Trail Unmanned Vessel),明确了ACTUV的任务是在没有人员支持的敌对环境下对敌方安静型常规动力潜艇进行长达数月的持续跟踪。该无人艇重点突出稳定性、续航力、自主导航等性能设计,采用主动声呐作为主要探测手段,部署在港口要道、海上咽喉等关键海域,平时用于搜集潜艇情报,战时作为反潜攻击平台使用。2016年4月7日,ACTUV技术验证艇“海上猎手”号服役,开始为期2年的概念验证和艇载传感器测试。除军方外,成立于20世纪90年代的Navtec公司研发了基于喷水动力的USV-Owl MKⅡ,它在隐蔽性和搭载能力上有显著提高,并具有侧扫声呐和摄像功能,已被应用在波斯湾。
以色列是在USV军事化方面领先的国家。最负盛名的是以色列国防部研发的“保护者(PROTECTOR)”系列的USV,该USV能在不暴露身份的情况下执行高危作战任务,降低船员和士兵的作战风险。“PROTECTOR”采用远程控制方式,最大航速能达到40kn,该型号USV已被新加坡和美国军方采购。以色列国防部还研发了一款自动航行的中型USV——“银色马林鱼(Silver Marlin)”,通过岸边监控系统和卫星通信控制系统实现对其的监控。该USV能够实现船舶的自动避碰,并具有自动航行和超视距操作功能,能携带多个传感器和武器系统,主要用于执行沿海智能化巡逻任务,是防卫、反恐、扫雷、搜救和救援的重要保障。2005年以色列Elbit公司推出一款“黄貂鱼(Stingary)”号USV,它是基于Elbit公司在无人机的基础上研发的,船型小、隐蔽性好,能够完成海岸物标识别、智能巡逻、电子战争等多项任务。
国内USV起步较晚,但已从最初的概念设计阶段逐渐过渡到实际運用阶段,上海大学研发有“精海”USV,全长6.28m,宽2.86m,吃水0.43m,满载重量2.3t,最大航速18节,最大续航力120海里,可按预设规划航路自动完成规避障碍物,自主完成S形转弯等特殊机动,其主要功能是自主完成水体环境要素探测、环境测量及海洋水文测量任务,具有较大军事应用潜力。上海海事大学研制有“海腾01”号高速USV,具有全自航模式、半自航模式和全遥控模式三种工作模式,配备有毫米波雷达、激光雷达、前视声纳等监测设备,可进行水上和水下障碍物的全方位探测,并通过多源信息融合提高障碍物探测的准确性和可靠性,为自主壁障提供足够信息。中国航天科工集团公司所属沈阳航天新光集团与中国气象局大气探测技术中心共同研制成功了我国首艘无人驾驶海上气象探测船“天象一号”,探测船总长6.5m,船体用碳纤维制成,采用智能驾驶、雷达搜索、卫星应用、图像处理与传输等诸多前沿技术,该探测船有人工遥控和自动驾驶(可按预定航线行驶)两种驾驶方式,如途中遇到障碍物可通过目标搜索识别系统和处理系统进行避让航行,该船配备可靠的动力系统,其航程可达数百公里,一次航行可在海面作业20天左右,填补了我国海洋气象动态探测空白,在应对海洋突发事件和监测海洋、大型湖泊等的环境及灾害预警等方面具有重要意义。
相较于国外发展现状,我国USV的发展依然缺乏符合我国国情与军事应用需求的总体规划,军事应用潜能还有待挖掘,探测、通信、导航、对抗等事关USV整体作战性能的关键子系统的战术性能与联合作战能力仍有待提升。
2 发展趋势
2.1 大力推进平台与载荷的模块化、标准化设计
美国海军UUV、USV研究目标的一部分就是实现模块化,要求UUV、USV在设计和建造过程中采用更多的模块化技术方法,并提出了实现模块化的途径。模块化设计可以保障UUV、USV根据任务的不同加载不同的任务模块,以及时适应未来多任务作战需求,如扫雷模块、反潜模块、电子战模块、诱饵模块等,通过模块化设计使UUV、USV具备更多的作战功能。
在标准化方面,目前仅在UUV、USV的主尺度设计上考虑了标准化问题,还需在控制系统、关键接口、载荷连通性等各个方面实现标准化,以期实现UUV、USV的通用化。在动力和推进设备、探测设备、通信设备等方面均有系列产品,便于总体采购和选型。
2.2 充分借鉴并利用已有民用成熟技术与产品
新型装备的发展往往要冒很大的风险,在资金投入上也非常巨大。美国海军在发展UUV、USV的过程中,充分利用了现有民用成熟技术,尽可能选用民间开发的UUV、USV作为试验平台,对其各种作战能力进行演示验证。这种将民用技术转化为军用的模式,既满足了需求,又降低了风险,并节省了大量的系统研制费用,同时也加快了研发速度。例如,美国的Bluefin系列、REMUS系列UUV均是从民用成熟产品改进而来[3,14]。
2.3 不断拓展任务领域,提升多任务作战能力
随着UUV、USV技术的不断发展,其军事应用潜能不断被挖掘,已远远超出替代有人作战平台执行高危作战任务的范畴。UUV、USV已由传统的水下静止目标探测(如军事海底测绘、情报、监视和侦察、水下障碍物搜索定位等),作战载荷布放(水声对抗器材、水下传感器、声呐浮标等),反水雷(探雷、猎雷和灭雷)等任务能力,向具备执行侦察和探测机动目标如对方潜艇,快速环境评估、区域控制、中继通信、中继导航甚至火力打击等多任务能力方向发展。
2.4 持续加快新技术与新材料的研发及应用
UUV、USV作战能力的拓展,作战水平的提升,离不开计算机、信息网络、人工智能、导航控制等众多领域新理论与新技术的快速突破。目前,水中无人作战平台水下自主控制技术、路径自主规划技术、机动目标探测技术、目标智能识别技术、组合式导航技术、新型电池技术等一系列新技术得到了充分的重视和发展。
UUV、USV在使用传统的钢制、铝制、钛制材料的同时,也在不断加大玻璃钢、碳纤维、陶瓷和合成物等新材料的使用范围,与传统材料相比,新材料具有重量轻、强度大、耐腐蚀等诸多优点,能够有效减轻UUV、USV重量,提高续航力与负载能力,并具备更好的隐身性能。
3 结束语
总之,美国海军在UUV、USV研究领域已经取得了突破性进展,部分装备已经投入使用,发展势头非常迅猛。其UUV、USV将向着高智能、系列化、多功能方向发展,UUV、USV协同作战使用将成为未来发展的热点。我国需要在国家层面统筹规划未来我国海上无人作战系统各方面的发展路线,深入研究海上无人作战系统的任务使命,拓展任务领域,对水中无人作战平台,如UUV、USV等重要组成部分制定科学合理的技术框架;增强海上无人作战系统互操作性和开放性,从资金、政策等多个方向支持水中无人作战平台自治、能源、推进、传感器、信号处理、探测、通信和导航等关键技术的突破,带动相关科学技术、相关产业的快速发展;鼓励有实力的单位利用现有技术储备与发展先进技术研制多样化、多功能、高自治能力的水面/水下无人作战装备,促进水中无人作战平台稳定、有序、良性发展,依据我国国情形成具有我国特色的国家海上无人作战与作业装备产业链,带动海军军事实力的飞速提升与海上国民经济的快速增长。
参考文献:
[1]United States Department of Defense.Unmanned SystemsIntegrated Roadmap FY2013-2038[R].U.S.:United StatesDepartment of Defense,2013.
[2]钱东,赵江,杨芸.军用UUV发展方向与趋势——美军用无人系统发展规划分析解读[J].水下无人系统学报,2017,25(1):1-30.
[3]陈强,张林根.美国军用UUV现状及发展趋势分析[J].舰船科学技术,2010(7):129-134.
[4]柳晨光,初秀民,吴青,等.USV发展现状及展望[J].中国造船,2014,55(4):194-205.
[5]李德远,吴汪洋,李晓晨.军用UUV的发展与应用前景展望[J].舰船电子工程,2012,32(4): 22-24,35.
[6]蒋荣华.潜载UUV的作战使用分析[J].舰船电子工程,2015,35(10):17-20,69.
[7]United States Navy.The Navy Unmanned Undersea Vehicle Master Plan[R].U.S.:Department of the Navy,2000.
[8]United States Navy.The Navy Unmanned Undersea Vehicle Master Plan[R].U.S.:Department of the Navy,2004.
[9]United States Navy.Autonomous Undersea Vehicle Requirement for 2025[R].U.S.:United States Department of Defense,2016.
[10]肖玉杰,邱志明,石章松.UUV国内外研究现状及若干关键问题综述[J].电光与控制,2014,21(2):46-49,89.
[11]The navy unmanned surface vehicle(usv)master plan[R].Navy US,2007.
[12]李本江,高孟,罗向前.美反潜无人艇作战使用分析[J].船舶电子工程,2012,32(8):3-4,7.
[13]李红军.美国“反潜战持续跟踪无人艇”对反潜战的影响[J].现代军事,2017,3:47-50.
[14]姚蓝,陈燕.发展UUV装备的几个问题[J].声学技术,2011,30(1):1-8.
