三维激光扫描技术在土方测绘项目中的应用
2019-10-29纪志刚樊东昊
郑 磊 纪志刚 易 恒 樊东昊
(天津市市政工程设计研究院,天津 300051)
作为众多工程项目重要组成部分的土方工程,不仅关系到工程项目进度的合理安排,施工组织的优化设计,更关系到施工成本的有效控制,因此,如何精确高效地获取土方数据一直以来就是广大科研技术人员研究的热点之一。当前,工程上常用的土方测量方法有水准仪测量法、全站仪测量法和GPS-RTK/VRS测量法等。其中,水准仪测量法受限因素较多,采集点位效率低下,不适宜大范围、起伏较大场地的作业;全站仪测量法虽然较水准仪测量法在多个方面均有了明显的提高,但是该方法对通视条件要求高,同时也存在采集点位效率低下的不足,难以实现土方的精细化测量;GPS-RTK/VRS测量法虽然较全站仪测量法免去了通视条件的要求,但却容易受到树木、建筑等信号遮挡的影响,同时也存在采集点位效率低下的不足。土方表面点位数据采集效率的低下以及由此可能造成的点位数量的不足不仅影响了土方工程的进度,更影响了土方模型的精细程度,进而影响到土方数据的精确程度。随着三维激光扫描技术的出现以及计算机性能的不断提高,一种采集速度快、点位密度大、精度高、非接触和测量范围广的土方测绘方法便成为了可能。
1 土方扫描测绘技术
三维激光土方扫描测绘技术作业流程主要步骤如下。
1.1 现场踏勘,制定扫描作业技术设计书
扫描作业技术设计书应在现场踏勘的基础上,根据现场地形、地物实际特点,结合扫描作业的技术特点,合理选择扫描站点以及扫描测站数量。一般而言,扫描测站点位应优先选择在位置较高的稳固区域,以尽可能提高扫描覆盖范围,并减少扫描测站数量,降低劳动强度;其次,目标区域宜由3站及以上扫描测站的点云叠加而成,且不同测站点云之间应有足够的重叠部分,扫描测站几何构图形状也应尽可能优化,以利于减少目标区域的扫描死角,保证点云数据处理成果在X,Y,Z三个维度的精度。
1.2 扫描测站点测量
扫描测站点就是三维激光架设的站点。扫描测站点测量主要是利用CORS技术、GPS-RTK或者全站仪人工采集得到,以得到高精度的三维坐标。扫描测站点坐标主要是用来为点云数据的配准和定向提供依据,以得到点云数据的绝对坐标。
1.3 检核点测量
检核点可以采用靶标、靶球或者扫描区域内的特征明显的地物等形式。检核点选用靶标、靶球形式时,需要在扫描作业前将靶标、靶球布设到目标区域内,先对目标区域进行整体扫描,然后再对靶标、靶球进行精细扫描,以确保靶标、靶球有足够的点云密度,进而通过拟合计算等方法得到靶标、靶球的精确坐标。检核点选用特征地物形式时,则需要先对目标区域进行整体扫描,然后通过预览扫描后的点云信息,进而选定目标区域内适合作为检核点的特征地物(一般选择道路交叉口、台阶等,主要用来检查高程精度)。检核点测量主要是利用CORS技术、GPS-RTK或者全站仪人工采集得到,以得到高精度的三维坐标,并用来检核点云最终拼接以及平差成果的外符合精度。
1.4 点云外业数据扫描
根据技术设计书以及三维激光扫描仪操作手册,将扫描仪逐次架设在相应的测站点位上,接通电源,设置好各种参数后,即可对待测区域进行三维扫描。如果检核点选用靶标、靶球形式时,还需在整体扫描之后对检核点进行精细扫描。
1.5 点云数据内业处理
将点云数据从扫描仪中下载后导入计算机软件中,然后根据输入测站坐标→点云配准→去噪→平差(一般需要迭代处理)→滤波。滤波完成后即可进行质量检查与精度分析→抽吸→导出数据等步骤,得到土方计算所需的点云数据。
1.6 点云数据精度评定
三维激光扫描作业技术成果精度检查分为内符合精度检查与外符合精度检查。其中,内符合精度检查主要是检查点云数据拼接质量,主要方法是对拼接后的点云进行切片,查看不同测站点云之间是否存在分层以及分层的绝对间距。外符合精度检查主要是通过CORS技术、GPS-RTK技术或者全站仪现场人工采集测区内的特征地物的特征点数据,然后将人工采集的数据导入点云数据处理软件,检查检核点与点云数据之间的误差大小,作为点云数据的外符合精度。如若内、外符合精度超过限差,则均需要查明原因,并重新对点云数据进行拼接、平差处理,直至内、外符合精度均满足要求。
1.7 土方计算
当点云数据内符合精度、外符合精度通过质量检查之后,则可以根据土方精度的要求,确定格网大小,提取目标区域的点云数据,然后利用RiScan PRO配套软件或者CASS软件进行土方计算。
2 工程案例应用
2.1 工程概况
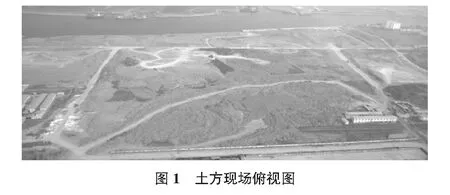
本工程位于天津市滨海新区,紧邻海河,是一处渣土临时存放点,南北长约1.5 km,东西宽约600 m。场地内部土堆数量多、起伏落差大、通视条件较差。堆土高度最高约15 m。紧邻本工程现场西北方位有多栋高层建筑正在施工但已封顶,楼顶高度预估在百米以上,可以俯瞰整个土方测绘现场,且有施工电梯可以直达高层建筑楼顶。紧邻本工程东南方位有一栋7层到顶的海警支队楼房,高约20 m。本工程土方测绘要求:根据甲方指定的范围线,3 d之内完成土方测绘任务并提交成果报告,见图1。
2.2 项目实施
1)制定测站布设方案。
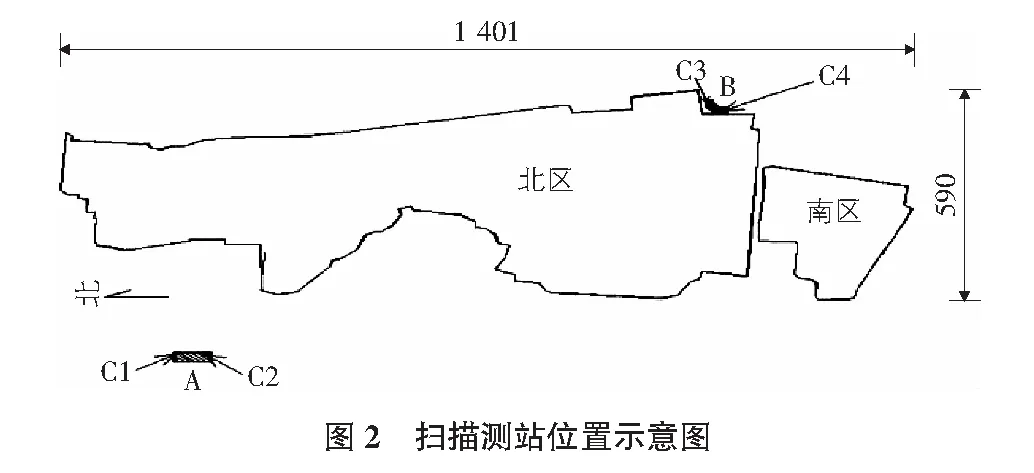
由于紧邻本工程西北方位存有高度超百米的高层建筑A,紧邻工程东南方位存在7层建筑B,且均可到达楼顶布设测站,因此,为了充分发挥三维激光扫描仪的扫描优势,特制定测站布设方案如下:在A高层楼顶布设C1,C2扫描测站,在B建筑楼顶布设C3,C4扫描测站,共计4站(如图2所示)。此方案实现了对向扫描、从高处往低处扫描,利用较少的测站实现了场地扫描的全覆盖,降低了作业强度,提高了作业效率。
2)点云外业数据采集。
本工程外业数据采集使用的是Riegl VZ1000三维激光扫描仪,测站点及检核点三维坐标基于天津CORS系统进行人工数据采集。其中,Riegl VZ1000三维激光扫描仪扫描最大距离可达 1 400 m,重复扫描精度可达±5 mm,扫描速度可达300 000点/s,每测站扫描用时约10 min;测站点及检核点平面坐标精度为±1 cm,高程精度为±2 cm。本工程外业数据扫描共计投入3人,见图3。

3)点云数据内业处理。
本工程点云数据处理采用RiScan PRO配套软件,点云数据拼接及处理后的部分效果图如图4~图6所示。
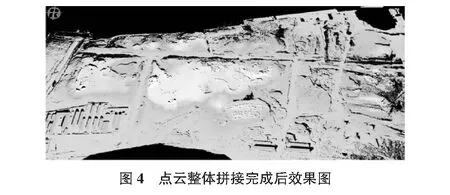
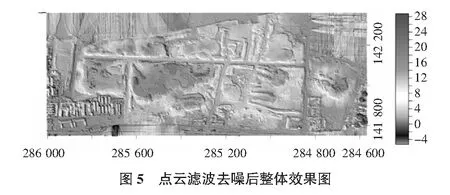
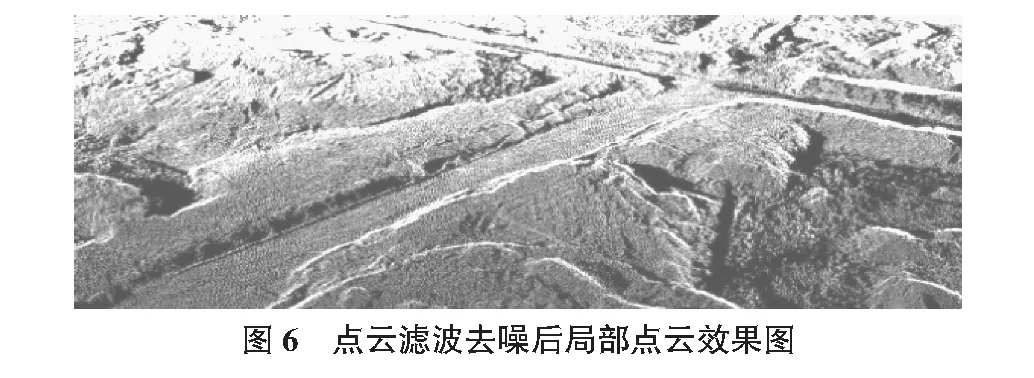
从图4~图6可以看出,本次土方扫描现场存在纵横交错的车道,这些车道又将其分割为多个高低不等的土堆(经统计本工程现场最大高程约为16.82 m,最低高程约为0.76 m),且本工程土方地形分布极不规则,人工测试难度极大;而本次土方测绘采用了高处架设三维激光扫描仪进行俯视扫描的技术方案,从点云数据上看,本次扫描以较少的人员、较少的测站,实现了对待测区域的快速、全覆盖、精细扫描,充分体现了三维激光在高精度地形建模以及土方测绘工程中的极大优势。
4)质量检查与精度分析。
点云切片宜在俯视图下矩形框选点云,然后通过旋转工具,侧视或平视,以查看不同测站点云之间是否存在明显分层,并量取点云分层之间的最短距离。
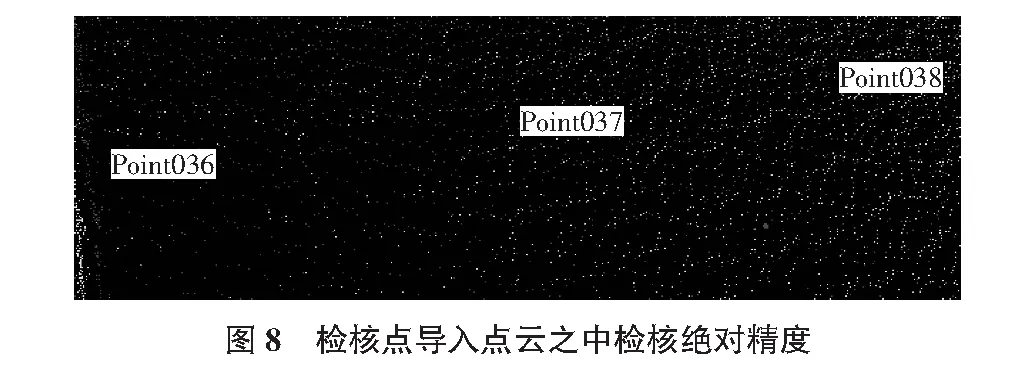
从图7可以看出,点云拼接效果较好,不存在明显分层,内符合精度良好。本工程利用GPS设备采用CORS技术共计采集特征点位45处,将检核点数据导入点云后如图8所示,通过中误差统计,本工程高程精度为±4.1 cm,满足土方测绘的精度要求。中误差计算公式如下:
其中,σ为高程中误差;hCORS为基于CORS技术得到的特征点高程值;hRS为基于三维激光点云成果得到的特征点高程值。
5)土方计算及效果分析。
鉴于不规则三角形法(TIN)在表征地形特征方面能力比较强,在计算土方时直接利用实测数据作为网格结点,不改变原始数据和精度,还能够插入地性线以保存原有关键的地形特征,计算得到的土方数据精度较高,本文采用不规则三角网(TIN)法作为本工程的土方计算方法。其中,计算软件采用的是CASS9.0,点云数据提取格网间距设置为5 m,并根据现场实际情况,适当增加特征点以及地性线,土方计算参考面为上一期测量成果。上一期土方测量采用的是“GPS+全站仪”模式,其中GPS利用CORS技术进行测站点平高坐标采集以及碎步点平高坐标采集,全站仪用来采集碎步点,点采集间距控制在5 m以内。
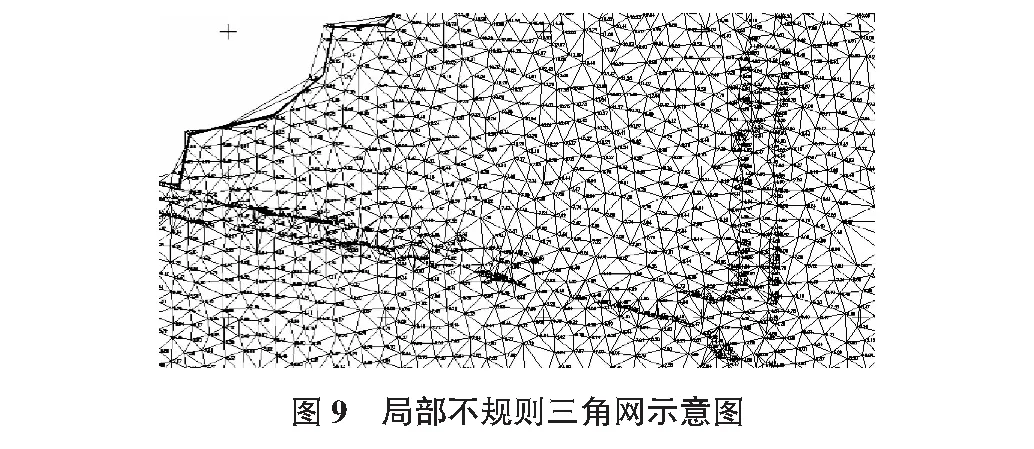
由于本工程利用5 m格网提取的点云数据较多,点云提取结果的整体缩微图以及由此生成的三角网整体缩微图展示效果较差,因此,本文在此给出局部不规则三角网示意图(如图9所示)以说明三维扫描测绘技术在土方测绘项目的应用情况。由图9可以看出,本次土方高程点数据量较为密集且分布均匀,而且构网三角形几何形状也比较好,大小也比较均匀,从而为构建高精度的地面模型以及高精度的土方计算结果提供了坚实的保证,也进一步说明了三维激光扫描技术在土方测绘项目中的应用优势。
为了进一步说明三维激光扫描技术在土方测绘项目中的优势,本文对全站仪+GPS、三维扫描两种模式的关键参数进行了统计,如表1所示。由表1数据可以看出,三维扫描模式的构网三角网个数是全站仪+GPS模式的1.5倍以上,地面模型的表征能力得到大幅提高;从投入人员数量上看,三维扫描模式所需人员则为传统方法的37.5%,节省人力成本60%以上;从作业耗时上看,全站仪+GPS模式需要耗时4 d,是三维扫描模式的4倍。

表1 土方计算成果量化数据对比表
3 结语
本文针对某渣土场土方测绘项目面临的土堆数量多、落差大、通视条件差等难题,给出了一种利用三维激光扫描仪进行扫描测绘的方法。工程实践经验表明,该方法人员需求少,作业效率高,点位密集且分布均匀,地面模型三角网个数较全站仪测绘方法有了显著提高,实现了土方测绘的精细表征与计算,使得土方计算结果的精度得到了有效保证与显著提高,对工程成本控制,优化施工组织设计也将起到积极的促进作用。需要说明的是,如需得到更高精度的土方计算结果,则点云提取的格网间距需要降低到1 m,甚至0.5 m;不过此时用于土方计算的数据量就会比较大,则需要考虑利用ARCGIS来完成计算。