非刚性三维形状匹配中基于谱分析的形状描述符综述∗
2019-10-28武仲科王醒策吕辰雷刘香圆周明全
张 丹 , 武仲科 , 王醒策 , 吕辰雷 , 刘香圆 , 周明全
1(北京师范大学 信息科学与技术学院,北京 100875)
2(北京师范大学 虚拟现实与可视化技术研究所,北京 100875)
非刚性三维形状匹配是图形学中的重要问题,是形状识别[1]、形状检索[2]、形状配准[3]、形状分割[4]等工作的研究基础.同时,非刚性形状匹配也为三维可视化[5]、生物计算[6]、人脸识别[7]、医学图像处理[8]等应用领域提供了坚实的理论依据.在上述研究中,非刚性三维形状检索与非刚性三维形状匹配是两个非常相似却不相同的研究问题.非刚性三维形状检索的主要思想是:首先,将非刚性三维形状库中的所有形状映射到特征空间中,计算所有形状的特征值并添加索引;其次,根据用户的需求设置检索阈值,并选择合适的相似度计算方法;最后,提取出满足阈值的形状,并按照相似度降序输出形状[9].而非刚性三维形状匹配研究的是形状相似性问题:同样将待匹配的形状映射到特征空间中,选择形状的局部特征、全局特征或者两者的结合代替待匹配的形状;然后选择某种代价函数或者距离函数度量特征,并将特征之间的度量值作为非刚性三维形状匹配度.可将其概括为两个关键步骤:(1) 提取形状上有效的形状描述符;(2) 选择合适的相似度度量.
本文综述了非刚性三维形状匹配中基于谱分析的形状描述符.对于刚性三维形状匹配,目前已有大量的研究成果[10−12],其中,迭代最近点匹配算法(iterative closest point,简称ICP)[13]是最常用的三维形状匹配算法.ICP将形状上采样点的空间位置作为形状描述符,通过多次迭代最小化源形状和目标形状采样点之间的空间距离,实现刚性三维形状匹配.然而,ICP 采用人为设置的迭代次数作为迭代终止条件,导致算法容易陷入局部最优.此外,对于有拓扑噪声的形状,仅用空间位置作为形状描述符,无法实现非刚性三维形状的高精度匹配.因此,研究者需提取更加有效的形状描述符用于三维形状匹配.形状描述符是一种描述形状语义信息和几何信息的方法,有时候也被称为某种算子,研究者通过选择合适的形状描述符,可以实现非刚性三维形状的高效匹配.常用的形状描述符一般包括4 类:基于形状表面特征的描述符、基于形状统计特征的描述符、基于形状拓扑的描述符以及基于谱分析的形状描述符,本文重点综述了基于谱分析的形状描述符.
第1 类形状描述符致力于描述形状表面的特征及其在全局欧氏变换下的不变性.尺度不变特征变换(scale invariant feature transform,简称SIFT)描述符[14]是其中应用最广的描述符,SIFT 于1999 年由Lowe 等人提出,被用于检测和描述图像中的局部特征,并在2005 年由Mikolajczy 等人证明其具有很强的鲁棒性[15].之后,许多研究者也在此研究的基础上引入隐马尔可夫模型、核判别分析及测地线圆环等方法对其进行不断改进,提高了SIFT的实时性及鲁棒性[16−18].形状上下文(shape context)[19]描述了形状表面上图像中的线条,同时存储每个点相对其他点位置的分布,并给出形状上点的局部上下文信息,在一定的图像区域内将点云分布转化为二维自旋图,执行三维形状的表面匹配.为了分析有特殊铰链和关节的三维分子形状,Feng 等人提出了一种基于节点感知的三维形状描述符[20],该描述符由形状边界上任意点的局部形状半径变化的信息编码定义,用于描述有关节的三维形状.积分不变量(integral invariant)[21,22]描述符通过对称组对原始形状进行重建,用积分不变量作为形状的特征,该描述符可作为定义形状之间其他距离的基础.梯度方向直方图(mesh HOGs)[23]由离散网格上顶点的几何特征定义,例如曲率、测地线积分等,该描述符描述了形状上的纹理特征而非几何特征.与此类似的还有Tombari等人提出的一种局部描述符——CSHOT 描述符[24],该描述符通过匹配形状的特征点获得点对点的对应,主要用于三维形状表面匹配、目标识别等.
第2 类形状描述符基于对形状统计特征的描述,主要描述形状的全局属性.Osada 等人[25]在2002 年提出了形状分布(shape distribution,简称SD)描述符,其算法步骤为:(1) 在形状上选择合适的欧式度量函数,如D1 距离(测量形状上某个中心点到其他任意点的距离)、D2 距离(测量形状上任意两点间的距离)以及D3 距离(测量形状上任意3 点组成区域面积的平方根)等,图1 为Osada 的文章中提到的5 种距离;(2) 计算形状上所有采样点对间度量函数的分布直方图;(3) 将该直方图作为形状的线性形状描述符,并用于形状分析.该方法基于统计分析思想、易于理解且具有很强的普适性,然而SD 方法中的提到的5 种距离只适合描述刚性物体的属性,当物体发生非刚性变化时,例如等距变换,其值会随之变化.等距变换是指形状保持曲面上任意两点间曲线长度不变的变换,例如一个人弯曲胳膊后,胳膊上任意两点长度不变,形状发生等距变换后的不变性称为等距不变性.基于上述研究,Mahmoudi 等人[26]使用基于D1 距离改进的测地距离分布直方图作为新的形状描述符.测地距离是欧式空间中的直线段在黎曼流形上的推广,具有等距不变性,测地距离定义了曲面上两点间的最短距离[27].测地距离不仅具有局部最短性,还含有其他丰富的几何信息,但当两点间的曲面部分发生缺失或者有缝隙时,测地距离会因为联通路径不能通过而发生改变,对拓扑变化鲁棒性不足.此后,其他的工作也对此进行了改进,但始终无法克服测地距离对拓扑变化的敏感性[28].基于形状统计特征的形状描述符继承了统计学中统计量的稳定性,在描述性状特征时鲁棒性较高,很适用于分子形状比较(molecular shape comparison,简称MSC)或者三维关节变形形状.Liu 等人使用内部距离形状签名(inner distance shape signature,简称IDSS)描述了三维分子形状,并计算了IDSS 直方图之间的度量作为三维分子形状间的相似度[29].在此基础上,Liu 等人基于可见性图提出一种新的内积距离计算方法,计算了有关节的三维体模型的内部距离,其对关节变形形状发生拓扑变化鲁棒,能够很好地描述三维关节变形形状[30].
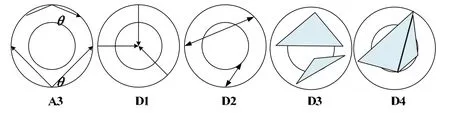
Fig.1 Five distances defined in shape distribution图1 形状分布中定义的5 种距离
第3 类描述符基于对形状拓扑结构的特征提取,该类描述符将三维形状匹配问题转换成其拓扑结构匹配问题,应用两个形状拓扑结构的匹配结果作为形状的匹配结果.三维形状的拓扑结构精确地描述了形状的全局和局部几何形态特征,并且保留了形状的层次结构.具有代表性的两类描述符分别是基于Reeb 图理论的描述符和基于形状的骨架线理论的描述符,图2 为两个不同形状的Reeb 图和骨架线图示.

Fig.2 Diagram of Reeb graph and skeleton with different shapes图2 不同形状Reeb 图与骨架线图示
Reeb 在1946 年基于形状的拓扑结构提出了Reeb 图的概念,其具体步骤为:首先,在三维形状的顶点上定义连续光滑函数f:M→R;其次,根据形状的顶点坐标计算顶点处的函数值,并将顶点进行分类;最后,根据顶点分类结果将形状M映射为Reeb 图R,函数值相同且位于同一连通区域的顶点在Reeb 图中映射为一个节点.Reeb 图能够很好地刻画形状的拓扑结构,且能起到降维的作用.定义合适的函数f是Reeb 图算法的关键,常用的函数f有高度函数和Morse 函数.Shinagawa 等人[31]采用高度函数、权重函数和形状上孔的数量等先验知识自动地生成三维形状的Reeb 图.Hilaga 等人[32]通过测地距离、测地线定义了Morse 函数,并基于此提出了多分辨率Reeb算法(MRG),Bespalov 等人[33]在此研究上改进了MRG 算法,并用于CAD 模型匹配.Biaso 等人[34]基于Morse 函数,提出了扩展Reeb 图算法(extend reeb graph,简称ERG),该算法刻画了形状上临界点之间的拓扑关系,但该算法对形状发生拓扑变化时鲁棒性较差.Tierny J 等人[35]基于特征点的思想构造Reeb 图,其通过特征提取算法提取形状的特征点,并通过图构造方法生成Reeb 图,并应用Reeb 图进行部分形状检索.骨架线,也被称为三维形状的中轴,是刻画三维形状拓扑结构的另一个重要方法,不但能用线段很好地描述模型的结构信息,而且能高效地保存形状,提高形状空间存储率和形状检索率.Sundar 等人[36]使用拓扑细化算法提取了形状的骨架线.Cao 等人[37]提出了一种基于拉普拉斯压缩的骨架线提取算法,该算法可快速提取点云模型的骨架线.Sfikas 等人[38]基于形状的拓扑信息和共形几何特征,提出了一种非刚性三维形状检索方法,该算法具有稳健又高效的检索精度和计算速度.
以上3 类形状描述符大多应用于描述刚性形状,对于形状发生等距、拓扑等非刚性变化不鲁棒,因此不适用于非刚性三维形状匹配.近年来,应用基于谱分析的形状描述符进行非刚性三维形状匹配成为了一个新的研究热点,部分研究工作[39−44]表明,基于谱分析的形状描述符对非刚性形状的拓扑噪声有较好的鲁棒性,同时具有等距不变性.谱分析源于黎曼流形表面上的拉普拉斯-贝尔塔拉米(Laplace-Beltrami,简称LB)算子[45,46],LB 算子是一个著名的内蕴算子,它被分解为特征值和特征向量的组合,研究者常常将LB 算子的特征值称为“谱”.为了研究方便,研究者将三维非刚性形状定义为黎曼流形,通过LB 算子描述形状特征,将形状用“谱”的方法表示.这种在谱空间中进行形状分析的方法被称为谱分析[47].谱分析源于形状的内蕴属性,该方法提供了一种自然的方式进行非刚性三维形状匹配.
谱分析包括谱形状描述符及诱导出的谱距离,常用的谱形状描述符包括形状DNA(shapeDNA)[48]、全局点签名(global point signature,简称GPS)[49]、热核签名(heat kernel signature,简称HKS)[50]、双调合签名(biharmonic signature,简称BS)[51]、波动核签名(wave kernel signature,简称WKS)[52]等.在一个形状表面上,由谱形状描述符诱导出的谱距离[53]是一种较好的度量结构,具有等距不变性以及对拓扑变化的鲁棒性.常用的谱距离包括交换时间距离(commute-time distance,简称CD)[54]、热扩散距离(heat diffusion distance,简称HDD)[55]、双调和距离(biharmonic distance,简称BD)[56]及波核距离(wave kernel distance,简称WKD)[57].使用谱形状描述符进行三维非刚性形状匹配时,需要选择数量一致的采样点,为了避免非刚性形状匹配时采样点的选择问题,基于SD 方法,Bronstein 等人提出使用谱距离分布函数作为一种新的形状描述符[58,59].谱距离分布函数将一对形状的相似性转化为其形状上谱距离分布函数的相似性,同时兼具SD 方法和谱形状描述符的优点,能描述形状的全局统计属性.Cao 等人也应用谱距离分布函数进行了三维非刚性形状分类,并比较了几种谱距离分布函数的性能[60].因此,基于现有研究方法,本文对基于谱分析的谱形状描述符和谱距离分布函数用于三维非刚性形状匹配进行了详细的研究.
本文第1 节给出基于谱分析的三维非刚性形状匹配的一般框架、LB 算子的详细介绍及离散化计算.第2节首先详细介绍了几种谱形状描述符:shapeDNA,GPS,HKS,BS,WKS,给出了谱形状描述符的推导过程及其在离散网格上的计算方法;其次,总结与分析了这几种形状描述符在非刚性三维形状匹配中的表现和特性.第3 节给出谱距离的定义和形式化表达,同时给出不同谱距离在三角网格上的离散计算方法以及谱距离分布函数的计算方式.第4 节是实验验证部分,实验中使用不同谱形状描述符和谱距离分布函数进行非刚性三维形状匹配,观察不同谱形状描述符参数变化对匹配效果的影响,同时验证了第2 节提出的预测的有效性,并做出合理分析.
现有的形状描述符研究工作[9,61−66]对于谱分析的总结和介绍相对较少,大多数研究工作只是从理论上研究了谱形状描述符或谱距离分布函数,很少有文章系统地对于两类形状描述符进行理论分析和实验验证.本文基于现有的研究成果,弥补了表1 中工作的不足,主要贡献如下.
(1) 提供应用基于谱分析的形状描述符进行三维非刚性形状匹配的框架,并给出该方法的原理分析和数值计算;
(2) 系统地对比不同形状描述符的数学定义及算法特性;从计算精度、鲁棒性、时间复杂度等多方面比较其各自优缺点;并且在非刚性三维形状标准库中进行了两类描述符的实验比较;
(3) 给出不同谱形状描述符和谱距离分布函数的最优使用场景,讨论了谱分析应用于非刚性三维形状匹配中存在的问题以及未来的发展趋势,对谱分析进行推广,为研究者选择基于谱分析的形状描述符提供参考.
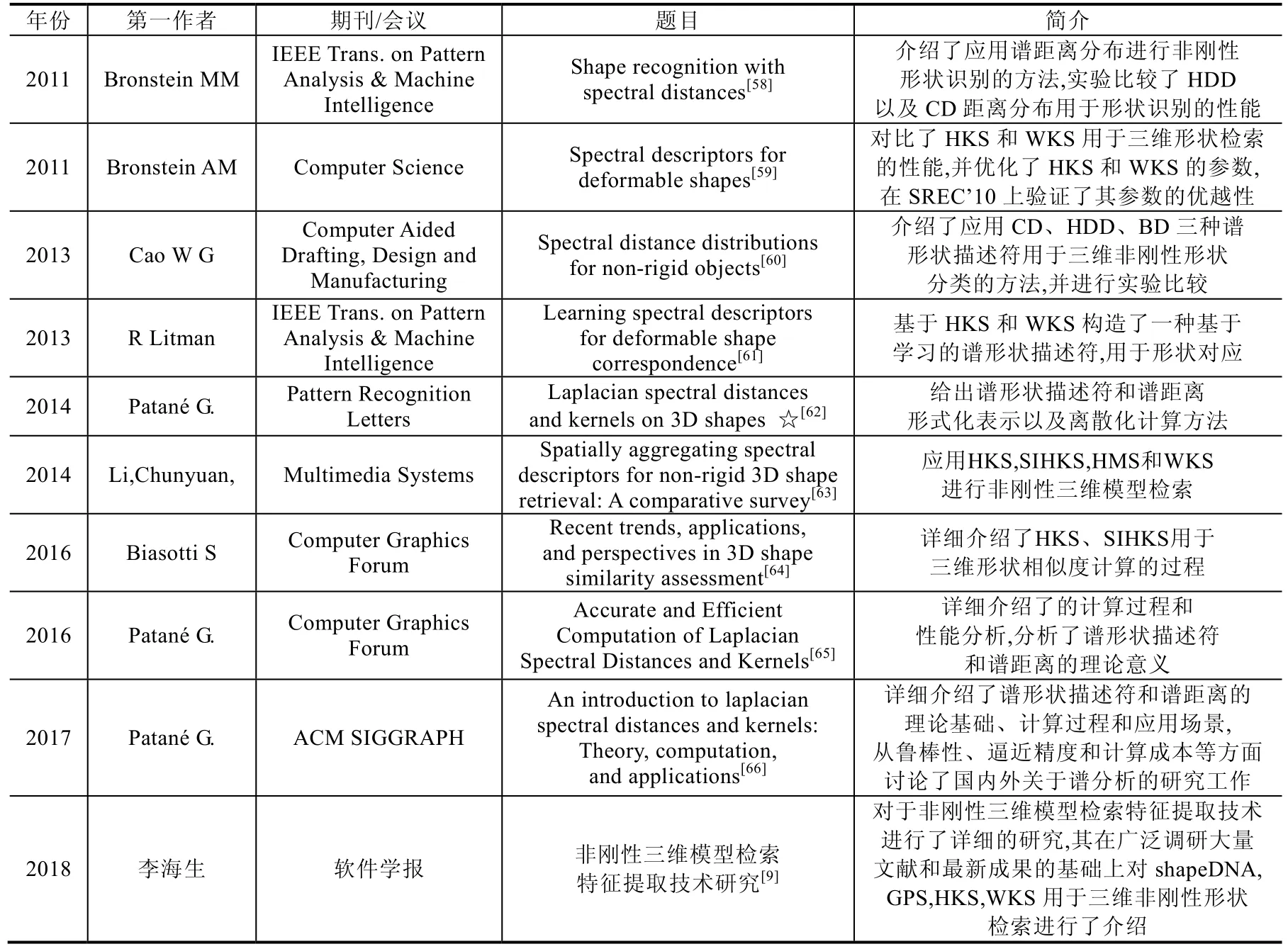
Table 1 Several studies about summary and analysis of spectral analysis表1 谱分析的主要文章综述与分析
1 基于谱分析的非刚性三维形状匹配框架
本文首先对基于谱分析的非刚性三维形状匹配的框架进行介绍.在数学中,谱分析是一个广义的方法,它将一个矩阵的特征向量和特征值理论扩展到一个含有更广泛运算符结构的谱空间中.在形状匹配中,谱分析是指将形状上的LB 算子离散化表示为LB 矩阵,对LB 矩阵进行谱分解得到LB 算子的特征向量和特征值.利用LB算子的特征值和特征向量,可以定义出不同的谱形状描述符及其诱导出的不同的谱距离.通过计算一对形状上的谱形状描述符离散值或谱距离分布函数值,研究者可以对比一对形状的局部或整体对应关系,得到一对形状的非刚性匹配结果.本节首先给出非刚性匹配谱分析的一般框架,其次给出LB 算子的定义及离散化计算及谱分解形式.
1.1 非刚性匹配谱分析框架
LB 算子的特征值与特征向量常常被用来描述模型的形状特性.利用谱形状描述符和谱距离可以很好地进行非刚性形状匹配,本文给出基于谱分析的非刚性三维形状匹配的一般框架如图3 所示.三维非刚性形状匹配的具体流程如下.
· 第1 步:输入一对3D 非刚性形状(点云模型、三角片模型等).
· 第2 步:计算形状上每个采样点的LB 算子值,并将其进行谱分解,由LB 算子特征值和特征向量定义不同的形状描述符,谱形状描述符可以诱导出谱距离.
· 第3 步:对谱形状描述符和谱距离分布函数进行离散化求值,得到谱形状描述符矩阵和谱距离分布函数矩阵.
· 第4 步:应用方差或其他度量方法计算一对形状间谱形状描述符或谱距离分布函数数值,并选择合适的度量函数进行形状匹配,形状匹配结果可以应用于形状检索、形状分类、形状对应等.
整个匹配过程中,形状描述符的选择是重要步骤,通过选择合适的形状描述符,研究者就可找到一对形状间的局部或整体匹配关系.
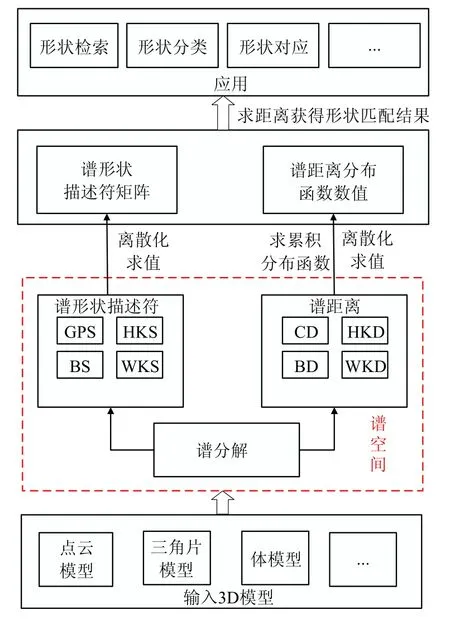
Fig.3 Non-rigid shape matching framework using spectral analysis图3 非刚性形状匹配谱分析框架
1.2 拉普拉斯-贝尔塔拉米算子
作为谱分析中的重要算子,拉普拉斯-贝尔塔拉米算子是Laplace 算子黎曼流形上的推广.Laplace 算子是欧氏空间中作用于光滑函数f的二阶微分算子,描述为f的梯度的散度[67].任意二阶可微函数的Laplace 算子定义为

根据黎曼流形梯度和散度的定义,若g为流形上的度量张量,G为矩阵{gij}的行列式,则函数f的LB 算子在局部坐标系中定义为[68]

在非刚性三维形状匹配中,研究者需要计算离散网格上每个顶点的LB 算子值.网格上某顶点vi周围三角形面片示意图如图4 所示.
在离散数学中,有限维离散LB 算子通常称为离散LB 矩阵,是对连续LB 算子的一种逼近.在顶点数为n的三角网格上定义函数f,则该函数在网格顶点vi处的离散LB 算子可以定义为[69]

等式(3)中,当计算点vi的LB 算子时,考虑网格中的所有顶点.对于网格上某顶点vi,若仅对其周围三角形面片能量求和,然后计算其偏导数并合并同类项,得到该点对应离散LB 算子的值:

其中,αj和βj分别表示连接vi和vj的边eij两侧的对角,Neigh(vi)表示与顶点vi相邻的顶点的集合.在完备有界的紧致流形上定义的LB 算子,具有对称性和非负性.若将LB 算子进行谱分解(或称特征分解)为特征值和特征向量的矩阵乘积形式,可得到流形上的LB 谱,即LB 算子的特征值和特征向量表达式:

λ0≥λ1≥…≥λn是LB 算子的非负特征值序列,λi是第i个特征值,φi是第i个特征值对应的特征向量.如果在封闭区域使用Neumann 边界条件[70],第1 个特征值为0,一般将最小的非零特征值定义为λ1.由于LB 算子是半正定算子,所以λn≥0.LB 算子可以解析地计算一些形状几何量(例如矩形、圆柱、圆盘或球面等).如果一些形状,例如动物、植物等,变换其形体姿态,例如在其关节处只有轻微的拉伸,这种情况被称为近似等距变化,LB 算子同样对近似等距变化鲁棒.
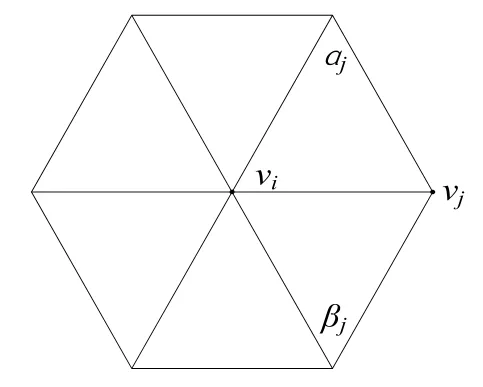
Fig.4 Diagram of a vertex vion a triangular mesh图4 网格上某顶点vi 的三角面片图示
2 谱形状描述符
由LB 算子的特征值和特征向量以定义不同的谱形状描述符,例如上文提到的shapeDNA,GPS,HKS,BS 和WKS,本节对几种谱形状描述符的详细定义以及离散计算方法进行介绍.
2.1 ShapeDNA
ShapeDNA 是Reuter 等人在2005 年通过提取黎曼流形表面的LB 算子的特征值序列进行非刚性形状检索,它的主要优点是易于表示形状,计算简单[48,71].ShapeDNA 是全局描述符,不能用于局部形状分析.Reuter 等人对LB 算子特征值序列的数目进行了研究,当特征值序列数目等于500 时算法收敛,在工程应用中,数目取值一般为50~100.基于LB 算子的定义,形状M上某点x的shapeDNAx可被计算为

g是被定义在形状M上的度量,n为特征值序列的编号,shapeDNA 为非负值.ShapeDNA 很好地描述了形状的内蕴属性,不依赖形状的参数化表示.形状上,所有采样点的shapeDNA 组成了shapeDNA 矩阵,确定n的取值后,可以唯一确定该形状的shapeDNA 矩阵,但相似形状的shapeDNA 矩阵非常近似,因此,其对于相似形状的区分度较差.
2.2 全局点签名算子
由于同类相似形状的shapeDNA 值很近似,为了提高shapeDNA 对同类形状的区分度,Rustamov 等人在其基础上定义了一种新的谱形状描述符——全局点签名.如果将形状内在的对称性转化为特征空间,将非刚性形状的特征空间映射到一个无限维空间——全局点嵌入域(global point signature embedding dominant),那么在该无限维空间中,可以定义M上的每点x的GPS(x)可定义为

和shapeDNAx一样,GPS(x)描述形状的全局特征.形状上每个点的GPS(x)都表示一个向量,一个形状上所有采样点的GPSM表示为一个m×n的矩阵,其中,m为形状上采样点的数量,n为LB 算子特征值数量,如等式(8)所示.
由上述定义可知,一个形状的GPS 矩阵维数很高.研究者需要根据应用选择合适的特征值数量n,以避免较高的计算量.
2.3 热核签名算子
根据热扩散理论,假定在形状上每点有初始热源μ0(x),并随时间t在形状M表面上进行热量扩散.在一定时刻,形状表面上达到热平衡状态.在这个过程中,定义热核ht(x,y)为t时刻从x点到y点转移所需的热量,表示热量从一个点传递到另一个点的可能性.等式(9)为形状上的热扩散偏微分方程,描述了形状表面上温度随时间变化状态.

其中,μ(x,t)是形状M上时间t对应的热量分布函数,Δ是LB 算子.该方程的解为

同样,对热核进行谱分解:

热核能完全表征一个形状表面的几何信息,如果将热核限制在时间域内,可得到一个简洁的形状描述符——热核签名:

HKS 具有多尺度特性,能通过调节时间t改变其描述的是形状的局部特征或者全局特征.形状M在不同时间尺度下HKS 值分布可表示为
其中,每一列代表形状在不同时间t下的HKS 值分布.图5 给出了在较小t时刻下,3 个形状的热核签名示意图.可以从图中看出,当t很小时,热核签名描述了形状的局部特征[44].
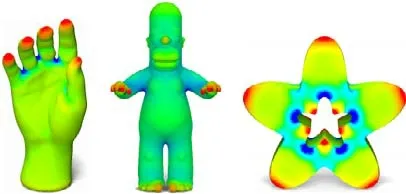
Fig.5 Diagram of heat kernel function for a small fixed t on the hand,Homer,and trim-star图5 较小t 值下手掌、人偶及五角星的热核签名图示
基于HKS,Bronstein 等人对HKS 进行改进,提出了具有比例不变性热核签名(scale-invariant heat kernel signature,简称SIHKS)[72].该描述符采用对数采样以及傅里叶变换,消除了一对形状缩放前后的缩放倍数,在原有的HKS 上增加了缩放比例不变的特性.其具体过程如下.
· 首先,设缩放系数为β,对于形状M,其发生缩放后的形状为M′=βM.参照HKS 定义,缩放后的特征值和特征向量满足λ′=β2λ,φ′=βφ,则缩放后,形状M′上某点x处HKS(x)的谱分解形式可写为

· 最后,对h取对数,消除β2的影响:,则.接着对hτ˙进行傅里叶变换,使时域的平移变换转移到复数域:

对等式(15)两边取傅里叶模后得到等式(16):

文献[72]从理论上证明了形状缩放前后的的热核签名仅有时间轴上的偏移,SIHKS 具有尺度变换不变性.图6 为原始马和缩放变化后,马的缩放不变热核签名图示.
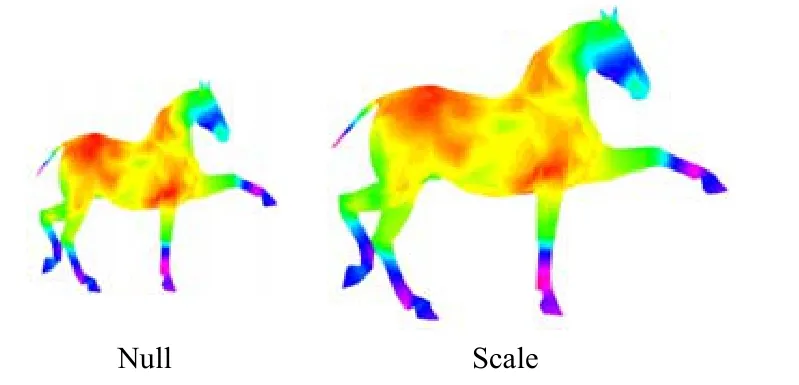
Fig.6 Scale-invariant heat kernel signature for the initial and scaled shape图6 原始形状和缩放变化后形状的缩放不变热核签名图示
2.4 双调和算子
为了同时兼顾形状的局部特性和全局特性,在HKS 和GPS 的基础上,将LB 算子的特征值和特征向量进行另一种组合,在形状M上的某点x定义另一种谱形状描述符,即双调和签名:

与GPS 类似,形状上的每个点的BS(x)都表示一个n维向量.一个形状的BSM表示为一个m×n的矩阵,其中,m为形状上点的数量,n为LB 算子谱分解数量.
BS 通过正则化拉普拉斯算子的特征值,很好地平衡了形状的局部特征和全局特征.BS 算子来源于双调和微分方程,该算子在形式上与GPS 非常相像,但是性能却有很大提升,分母由LB 算子的特征值的平方根变为LB算子的特征值,大大加快了描述符的归一化.与GPS 一样,当我们选用BS 表示形状时,需要根据应用场景选择合适的谱分解数量n,以避免较高的计算量.
2.5 波核签名
对于形状上的每个点,通过测量不同能量级的量子粒子的平均概率分布,文献[52]定义了一种新的形状描述符——波核签名,形状表面上的量子粒子的演化由波函数控制.通过求解Schrödinger 方程可得:

波函数的形式表达类似于热核函数,但意义却截然不同:热核函数表示是热量耗散,波动函数表示了能量的振荡.其中,x是形状上任意一点,Δ是LB 算子,i 是虚数,LB 算子和i 的乘积确保能量经过不同频率振荡后不会衰减.通过及谱分解理论可得,波函数φ(x,t)的谱分解形式为

其中,fk(t)为t时刻粒子的第k个频率,φk(x)为第k个频率对应的特征向量,可计算如下:

当t=0 时,表示期望值为E,频率λk的概率分布.Laplace 谱没有重复值,结合公式(20)及公式(21)可得:

|φ(x,t)|2为点x处粒子的概率分布.由于时间参数t对概率分布没有直接影响,若只考虑能量参数,将WKS 算子定义为点x处能量为E的一个粒子可被测量到平均概率:


由上述可知,WKS 采用带通滤波器,因此可以很好地分离形状,如图7 所示.
公式(24)中,WKS 的表达式具有一般性,可以通过选择不同能量概率分布函数fE(λk)得到不同的WKS.选择对数正态分布函数作为能量概率分布函数,则WKS 可写为
eN为能量规模参数,eN=log(E),λk为LB 算子第k个特征向量,σ为正态分布的方差,Ce为正则化WKS 函数.在实验中,本文采用与文献[52]一样的参数设置,则形状的WKS 在不同能量规模下分布为

其中,WKSM(eN)形状第m个顶点在能量规模为N下的WKS 值,每列代表不同能量规模下形状M每点的WKS值.当我们选用WKS 表示形状时,需要根据应用选择合适的能量规模eN,以突出WKS 的优势.
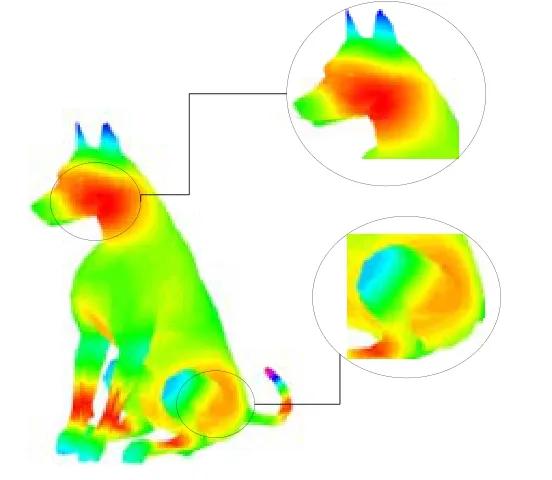
Fig.7 Wave kernel signature on a dog图7 狗的波动核签名图示
2.6 谱形状描述符比较
在谱形状描述符中,shapeDNA 的研究时间最早,因此整体性性能相对较差,但其为之后谱形状描述符的发展奠定了基础.每点的shapeDNA 由LB 算子的前n个特征值确定,忽略了LB 算子的特征向量的作用,shapeDNA最大的优点是易于理解,计算简单.但对局部特征的描述能力较弱,不适合相似形状的快速区分.
GPS 由LB 算子的前n个特征向量比上特征值得到.从定义上看,GPS 更加注重低频相关的信息,但对于形状发生非刚性形变(变化较小)时,形状上一点的GPS 值也会完全改变,增加额外的算法复杂度,性能并不好.总体来说,GPS 能够很好地反映形状上所有采样点的上下文信息,但对局部特征的描述能力较弱,适合非刚性形状的粗糙匹配,不适用于局部匹配.
HKS 定义了点x处的局部和全局属性.由于形状上的热扩散本质近似布朗运动,因此有较强的鲁棒性以弱化局部噪声的影响.作为低通滤波器的集合,HKS 主要由低频传输,能够很好地描述形状的局部几何信息.当时间t比较短时,形状上每个点的HKS 值与该点的高斯曲率直接相关,具有很强的信息存储性.但HKS 过于强调低频信息,会过滤掉一些高频率信息,损害精确定位特征的能力.因此相比较其他3 种算子,HKS 表征形状时不能很好地分离不同频率区域.此外,由于HKS 对时间参数敏感,所以在某个时刻下,不能同时表征形状的局部属性和全局属性.SIHKS 拥有HKS 所有的优点,还具有缩放不变性,但是其理解相对较难且计算复杂.
BS 平衡了大尺度距离(反映全局特性)和小尺度距离(反映局部特性),具有多尺度特性.它不依赖于时间参数,克服了HKS 依赖时间参数重的缺点,同时克服了GPS 没有多尺度特性的缺点.然而,由于BS 具有调和性质,单独表征形状的局部及全局属性性能较差.
WKS 同样对时间参数自由,其最大优点是采用带通滤波器能清楚地分离形状上的不同频率集合,且允许访问高频率信息,从而增加算子的精确匹配能力.此外,WKS 通过选择不同的能量规模而具有多尺度特性,若选择能量级别较高的量子粒子,波长越短,其分布越靠近形状上的点,此时反映形状的局部特性;反之,能量级别较低的量子粒子反映形状的全局特性.所以在匹配时,研究者应该根据应用场景选择一个合适的能量规模.
几种谱形状描述符在不同变换下鲁棒性等级见表2.

Table 2 Robustness levels of several spectral shape descriptors under different transformations表2 几种谱形状描述符在不同变换下鲁棒性等级
3 谱距离分布函数
谱距离(shape spectral distance distribution)源于谱分析,谱距离由形状表面上定义的谱形状描述符诱导得到,包括热扩散距离、交换时间距离、双调和距离等.若在形状M上定义度量空间,则由谱形状描述符诱导出的谱距离可定义为[62]

其中,φ(λi)为不同谱形状描述符使用的滤波器.在三角面片上,谱距离的离散化形式为[63]

其中,p,q为三角面片上的顶点,分别代表顶点p和q上LB 算子第i个特征向量.前文中提到的另一类基于谱分析的形状描述符就是谱距离分布函数,基于SD 方法的研究,Brostein 等人通过统计形状上任意两点间的谱距离,构造了谱距离分布函数最为一种新的形状描述符.假定形状M上任意两点的谱距离为d(x,y),若δ是距离阈值,μ是定义在M中的范数矩阵,χ是指示函数,则谱距离频率直方图可以计算为

在概率论与统计学中,概率密度函数(probability density function,简称PDF)是一个实值随机变量,用于描述多随机变量的分布,再由公式(29)可得谱距离分布函数可计算为

谱距离分布函数作为一种线性形状描述符,继承了谱距离的特征,具有以下特点.
(1) 采样不变性:对于形状M,如果对M的三角网格模型的顶点进行采样,包括上采样和下采样,则采样前后的形状的谱距离分布函数保持不变.
(2) 等距不变性:由于LB 算子是形状的内蕴算子,所以等距形状中任意两点的谱距离具有等距不变形.因此,等距形变前后,形状的谱距离分布函数理论上保持不变.但是在下文中,我们给出了不同谱距离的谱分解计算形式,在实际应用中,一般取前100 个特征值和特征向量.因此在实际的实验中,等距形状的谱距离分布函数与原始形状的谱距离分布函数值相似.
(3) 拓扑鲁棒性:相对测地距离分布,谱距离分布对拓扑变化的敏感性较低,谱距离分布函数具有较强的拓扑鲁棒性.
(4) 无需预处理:相对于谱形状描述符,应用谱距离分布进行三维非刚性形状匹配时,不需要寻找数量相同的采样点,也不需要配准采样点.
下文就详细对这4 种谱距离进行介绍.
3.1 交换时间距离
根据第2.3 节,在GPS 域中的内积可定义交换时间距离:

G(x,y)是两个无限维向量的内积,交换时间距离可写为

交换时间距离反映了连接一对点之间随机游走的平均时间.通过谱分解,交换时间距离可以表达为

其离散化形式为

热扩散距离和交换时间距离的关系为

热扩散距离反映了形状表面上两个点在时间t内的路径连通性,而交换时间距离是一对点之间在平均时间t内随机游走的扩散长度之和.
3.2 热扩散距离
热扩散距离由扩散核导出,并应用于降维和数据参数化等问题.扩散距离描述了形状M上点x与点y之间在时刻t时的连通率.将形状M上的随机运动看作是布朗运动,在这种情况下,扩散距离是对形状M上时间t时两点间的布朗运动的平均,更直观上的理解为两个热核之间的信息交互.所以形状上的两点x和y之间的扩散距离可以由下面的等式定义[39,51,73].

根据热核的谱分解形式以及热扩散理论,热扩散距离(也称热核距离)表示为

为了不失一般性,特征值从1 开始,离散化形式为

热扩散距离反映了扩散时间t内两点间的热流连通性.由于该距离是定义在形状表面的距离,所以是一个内蕴距离,当扩散时间t的取值很小时,此时热量扩散范围较小,该距离只能描述形状的局部特性;当t的取值较大时,该距离可以描述形状的全局属性,最后热量扩散直至达到热平衡状态.但t取值并不是越大越好,合适的t取值[60]为1/λj,λj为第LB 算子的第1 个非零特征值.
3.3 双调和距离
类似GPS 映射,双调和映射定义了一个无限维的双调和空间.
双调和域中的内积可定义双调和距离[40]:

B(x,y)是两个无限维向量的内积,双调和距离可表示为

通过谱分解,双调和距离可写为

离散形式可写为

3.4 波核距离
文献[66]用L2范式定义波核距离,类似于热核距离,波核距离的谱分解形式为

离散化形式为

4 实验与分析
为了对几种谱形状描述符和谱距离分布函数进行对比,本文在64 位32G 内存,win10 系统的Matlab2015 上进行了实验上进行了实验(注:由于shapeDNA 最早被研究,性能较差,因此在本文不加入比较).评估这种方法所使用的是TOSCA 2010(tools for surface comparison and analysis)数据集(高分辨率,http://tosca.cs.technion.ac.il/data/toscahires-mat.zip)[74]、SHREC 2011 数据集(鲁棒性,http://tosca.cs.technion.ac.il/book/shrec_robustness2010.html)[75]和 SHREC 2015 数据集(标准型,http://www.cs.cf.ac.uk/shaperetrieval/shrec15/SHREC15.zip).TOSCA 2010 数据集为非刚性形变的形状匹配提供了大量高清三维形状,图8 为部分TOS CA2010 库中形状.TOSCA 2010 数据库共包含80 个对象,包括11 只猫、9 只狗、3 只狼、8 匹马、6 人马、4 只大猩猩、12 个女性人物、2 个不同的男性形象,典型的顶点计数大约是50 000,数据库适用于非刚性形状分析.SHREC 2011 包含13 类形状的的各种变化形状,变化分为12 类,包括等距变化及在等距变化上加入洞、缩放、噪声、下采样等变化,每种变化共有5 个强度,图9 为部分SHREC 2011 库中形状.
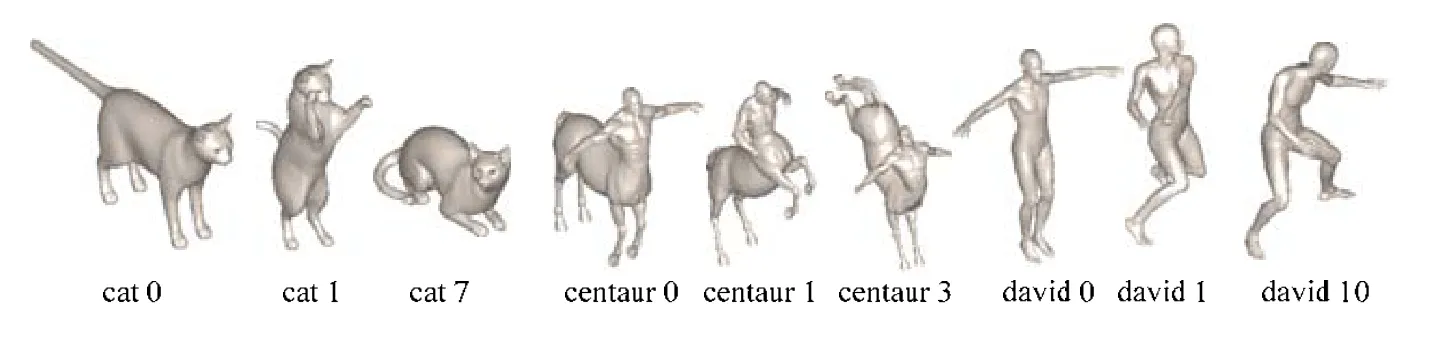
Fig.8 Part of the shapes of TOSCA 2010 database图8 TOSCA 2010 数据库中的部分形状
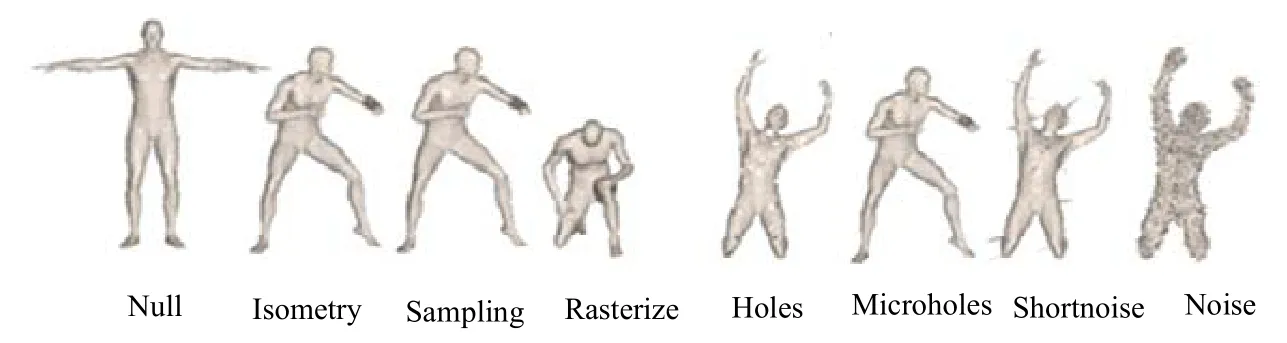
Fig.9 Part of the shapes of SHREC 2011 database图9 SHREC 2011 数据库中的部分形状
SHREC 2015 数据库由SHREC 2011[76]和SHREC 2014[77]中的部分形状组合而成,包含10 类形状,每类形状包含了基础形状的等距变化、近似等距变化、拓扑变化及加洞等非刚性变化,共计100 个形状,为非刚性三维形状检索提供标准形式,图10 为SHREC 2015 中的部分形状.
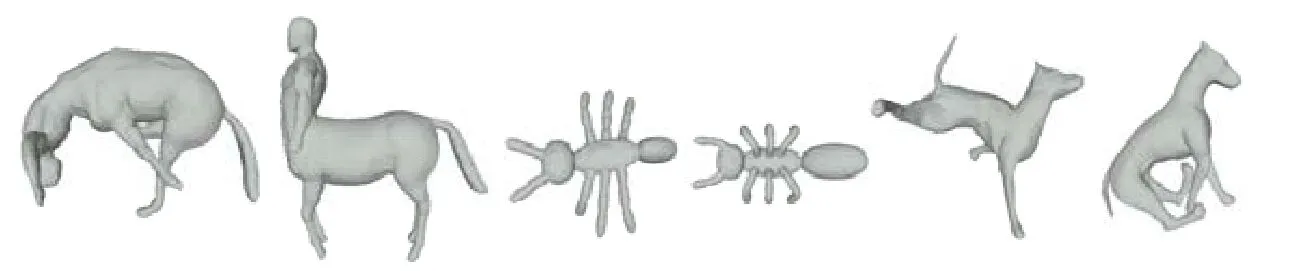
Fig.10 Part of the shapes of SHREC 2015 database图10 SHREC 2015 数据库中的部分形状
4.1 谱形状描述符参数比较
HKS 具有多尺度特性,由时间参数t决定该点描述的是形状的的局部或全局属性.图11 中选取不同时刻应用HKS 进行一组形状等距对应,颜色由黄到蓝代表HKS 值由大到小,当t=0.5 时,此时热量刚开始扩散,只能描述行david 足部的局部几何信息,此时,HKS 值与足部的高斯曲率值直接相关;当t=1 时,热量扩散到形状的大部分区域;当t=3.0 时,热量扩散到形状整个表面,此时,HKS 描述形状的全局几何信息.
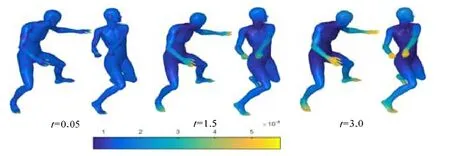
Fig.11 Non-rigid shape matching using heat kernel signature under different time t (shape:david 1 & david 10)图11 在不同时间t 下应用热核签名进行一组非刚性形状匹配(shape:david 1 & david 10)
WKS 对时间参数自由,图12 中选取不同能量级下进行一组非刚性形状匹配.当能量级下的数量增大时,WKS 能更精确地表达形状的局部特征,但其数量并不是越大越好,过大的能量级会增加导致WKS 无法刻画形状的全局特性,间接增加更多计算误差;如图12 所示,本文选取e100作为合适的能量规模.
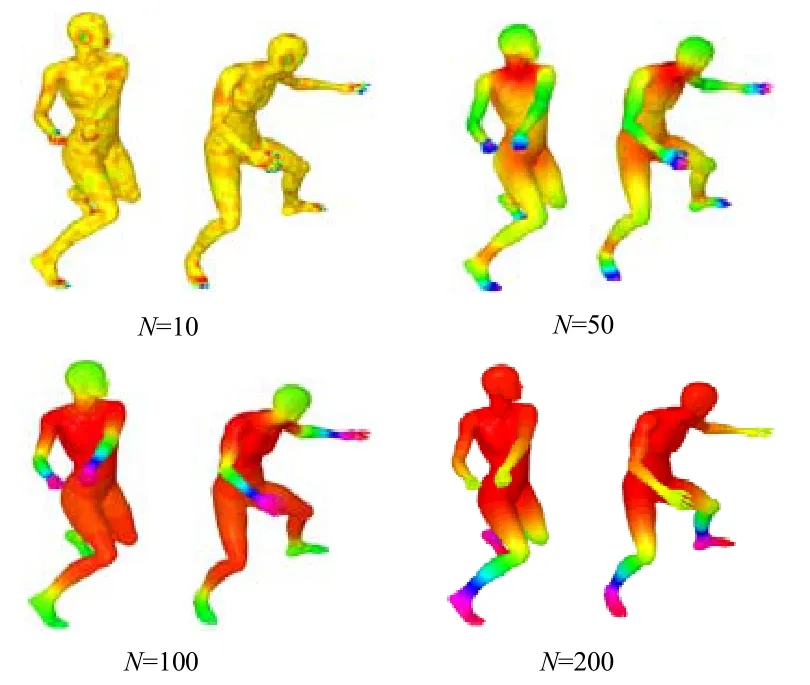
Fig.12 Non-rigid shape matching using wave kernel signature under different energy scale eN(shape:david 1 & david 10)图12 在不同能量级(eN)下应用波动核签名进行一组非刚性形状对应(shape:david 1 & david 10)
图13 基于库SHREC 2010 验证了表1 每种谱形状描述符在不同等距变化下的鲁棒性.可以看出,GPS 和WKS 总体鲁棒性较高.
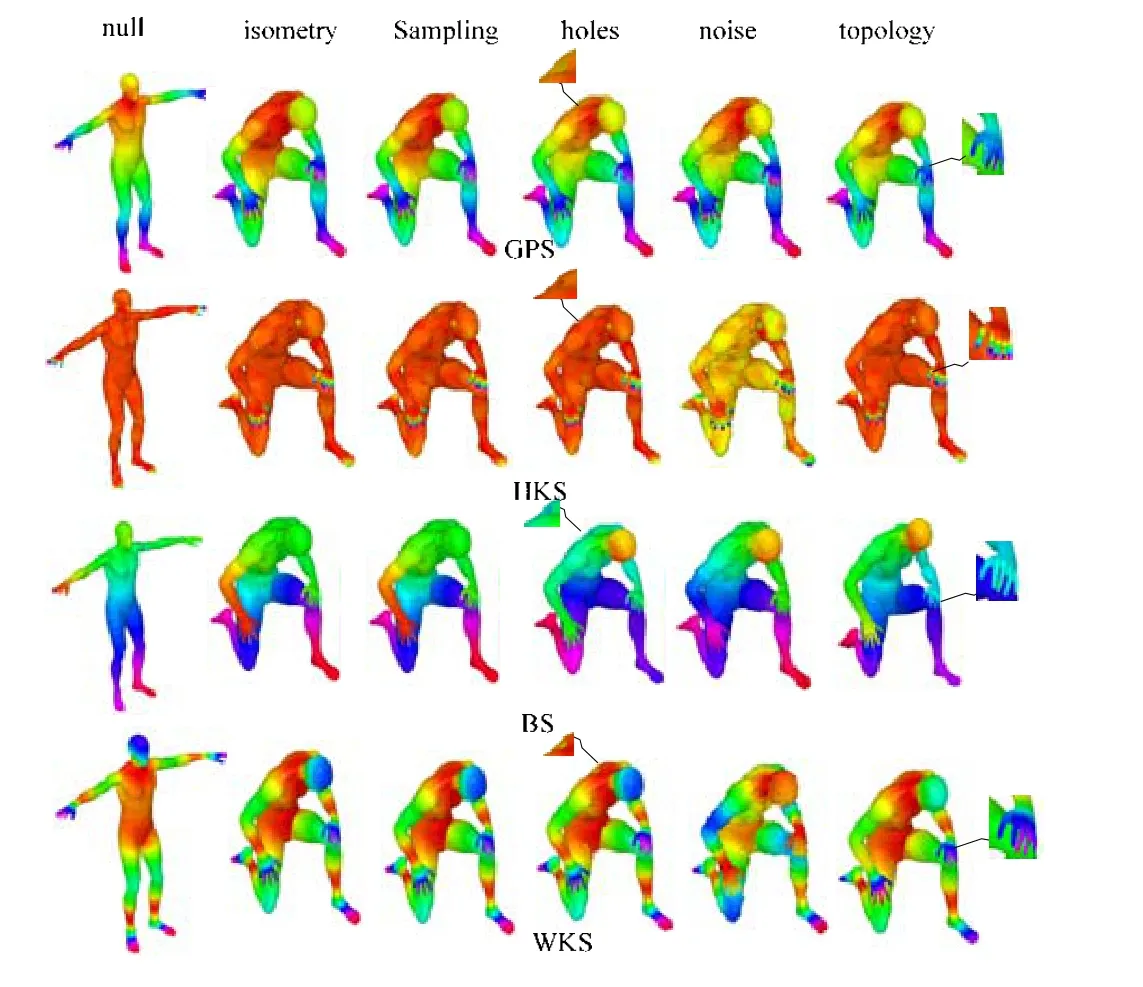
Fig.13 Compared with GPS,HKS,BS,WKS robustness in isometric,sampling,cave,noise and topological changes (t=3.0,λNum=100,e100)图13 对比GPS、HKS、BS、WKS 在等距、采样、加洞、噪声及拓扑变化下鲁棒性(t=3.0,λNum=100,e100)
4.2 谱形状描述符用于三维非刚性形状匹配比较
从图14 中可以看出,GPS 作为一个全局形状描述符,对cat 0 和cat 1 足部和腿部的细节描述不够,不能应用到局部匹配中,但是能够分清cat 0 和cat 1 前足和后足.
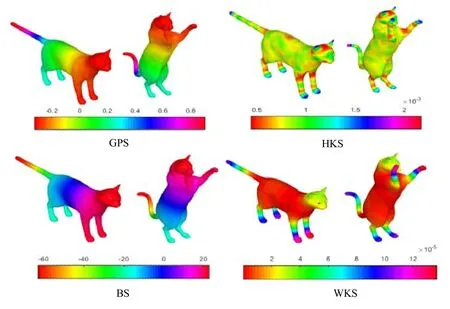
Fig.14 Non-rigid shape matching using GPS,HKS,BS,WKS (shape:cat 0 & cat 1,t=3.0,λNum=100,e100)图14 应用GPS、HKS、BS、WKS 进行非刚性形状匹配(shape:cat 0 & cat 1,t=3.0,λNum=100,e100)
而当时间参数足够大时,HKS 能表征cat 0 与cat 1 的局部几何信息和全局几何信息,但由于HKS 使用的都是一些低通滤波器,形状的高频率信息被抑制,不能精确地表示形状,相比GPS,HKS 能分清cat 的腿部和身体,但没有办法区分猫的前足和后足;BS 表现最佳,cat 1 相对cat 0 尾巴发生较大扭曲,此时,cat 0 和cat 1 为近似等距变化,BS 能够明确地描述尾部的近似等距变化且匹配度高;同时,WKS 在猫的尾部匹配度同样较高,且相比HKS,WKS 使用带通滤波器,减少低频的影响,在图中能够清楚地分离出形状的频带区域,具有优越的特征定位,且能区分猫的四足,适合高精度的匹配,但算法时间复杂度较高.
通过10 次实验求取平均值,几个形状描述符耗费时间如表3 所示,应用4 种谱形状描述符进行非刚性三维形状匹配的空间复杂度为O(n),n为三维形状上采样点的个数.由于GPS 和BS 都是高维向量,因此其耗费时间要多于HKS;同时,WKS 采用带通滤波器分离形状上的不同频率集合,对于形状的细节刻画较多,因此时间耗费相对最高.为了比较应用不同谱形状描述符进行非刚性三维形状匹配的匹配度,实验中,我们计算一对形状上采样点的谱形状描述符的相关系数R=corr2(A,B)作为三维非刚性形状匹配的匹配度(即一对形状的相似度),结果如表4 所示,WKS 和BS 都对参数自由,BS 能够调和地描述形状的全局和局部属性,WKS 能够在描述形状全局属性的同时刻画形状的细节.因此,应用WKS 和BS 的形状匹配相对较高.

Table 3 Time-consuming of non-rigid shape matching using spectral shape descriptors表3 应用谱形状描述符进行非刚性形状匹配所耗费时间

Table 4 Non-rigid shape matching using spectral shape descriptors表4 应用谱形状描述符进行非刚性形状匹配
4.3 谱距离分布用于三维非刚性形状匹配比较
有效的谱距离分布函数可以区分不同类别的形状,且对于形状发生非刚性变化,谱距离概率分布趋势差别较小,故可以通过匹配形状的谱距离分布,进行三维非刚性形状匹配[78].图 15 是计算一对形状(选用最TOSCA 2010 中最复杂的centuar0 和centuar1)的4 种谱距离分布:CD,HDD,BD,WKD,给出谱距离概率分布(注:由于整体分布趋势接近,无法看出差别,故同时给出分布概率小于等于0.1 的分布图作比较),可以很直观地从图15中看出,centuar0和centuar1的WKD概率分布趋势一致.说明WKD具有良好的精确匹配性,通过图中centuar0和centua1 的WKS 值对应,可以发现:应用WKD 概率分布能够区分半人马的胳膊、4 条腿;与上述相同,BD 概率分布同样趋势一致,但在区分本人马的前腿和后腿时区分度不大,只能分清前腿和后腿;CD 概率分布略有差别,由于GPS 对局部细节表述不够,导致CD 值有差异,图中的半人马仅能区分胳膊和腿部;HDD 概率分布总体走势一致,但差异较大,无法区分半人马的胳膊和腿,但同样的,对于局部细节刻画清楚.
通过10 次实验求取平均值,几个谱距离分布函数的耗费时间见表5.应用4 种谱形状描述符进行非刚性三维形状匹配的空间复杂度为O(n2),n为三维形状上采样点的个数.为了比较非刚性形状应用不同谱形状分布函数进行匹配的匹配度,实验中,为了直接得到一对形状的匹配度,我们同样计算一对形状的谱形状距离分布函数的相关系数作为三维非刚性形状匹配的匹配度(即一对形状的相似度),结果见表6.相比应用谱形状描述符进行形状匹配,应用谱距离分布进行形状匹配时,所有形状的匹配度都有提升.原因在于:应用谱距离分布进行形状匹配时不考虑形状的局部细节匹配,得到的是一对形状的全局匹配结果.因此,相比于谱形状描述符,谱距离分布函数在进行三维非刚性形状匹配时无需寻找一对形状的对应点,稳定性更强,更适用于非刚性形状整体匹配.
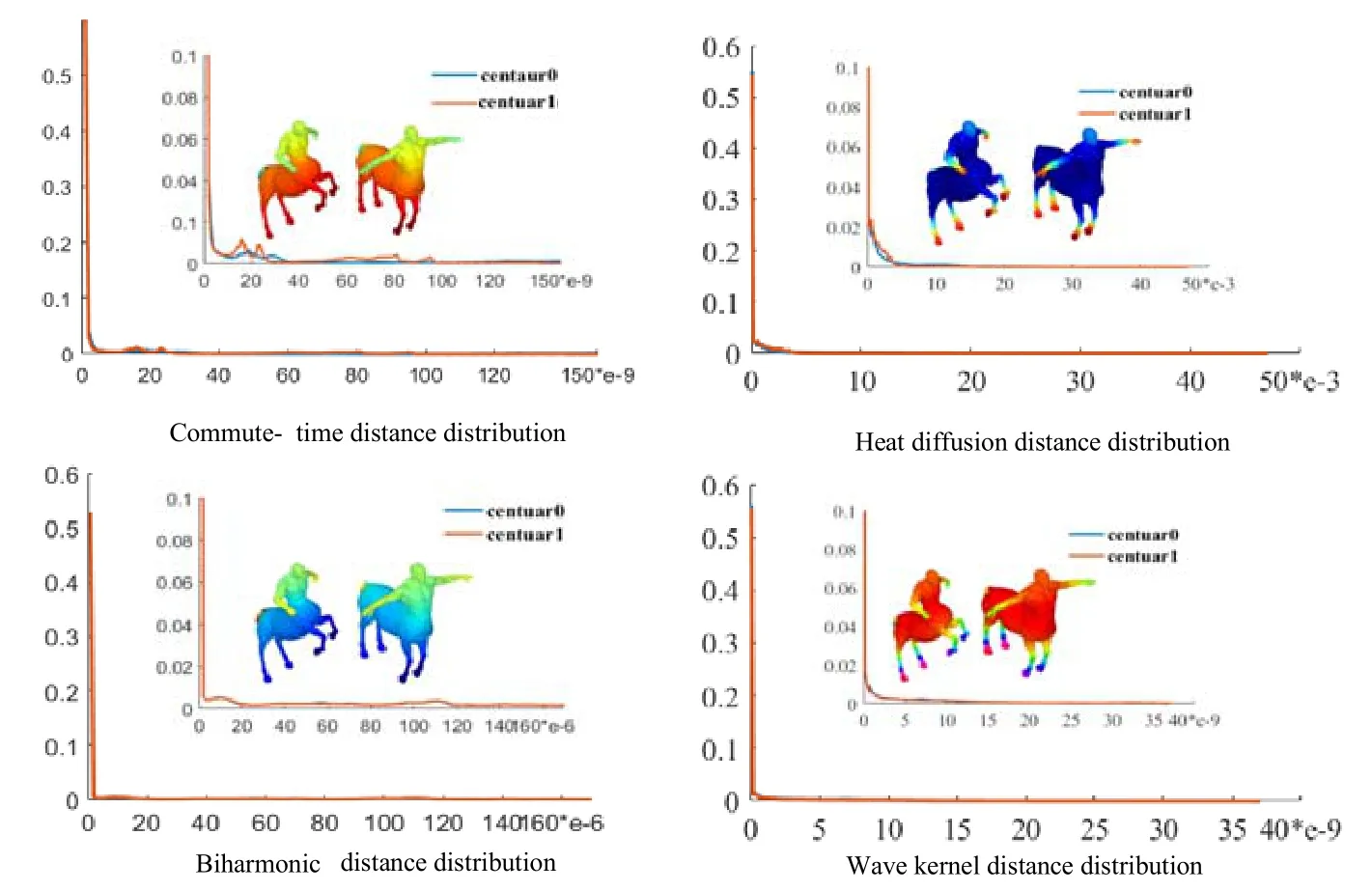
Fig.15 Distribution function of four spectral distances for non-rigid shapes using matching(shape:centaur 0 & centua 1)图15 4 种谱距离分布函数进行非刚性形状匹配(shape:centaur 0 & centua 1)

Table 5 Time-consuming of non-rigid shape matching using the distribution function of four spectral distances表5 应用4 种谱距离分布函数进行非刚性形状匹配所耗费时间

Table 6 Non-rigid shape matching using the distribution function of four spectral distances表6 应用4 种谱距离分布函数进行非刚性形状匹配
结合表3 和表5 我们可以看出,应用谱形状描述符进行形状匹配时的时间复杂度和空间复杂度要比应用谱距离分布函数的时间复杂度低,因为计算形状上任意两点的谱距离会耗费较多的时间和占用较多的空间.同时,结合表4 和表6 我们可以看出,应用谱形状描述符进行形状匹配时,随着形状大小的增加,形状的匹配度会略微降低;反之,应用谱距离分布函数进行形状匹配时,随着形状大小的增加,形状的匹配度会略微增高.因为当形状增大时,形状的三角网格面片数也会增加,导致采样点的谱形状描述符的计算量大大增加,降低形状匹配度;反之,形状的三角网格面片数增加,会增大谱距离分布函数的样本量,更能反映形状的全局属性,进一步提高形状的匹配度.
图16 为基于SHREC 2015,应用4 种谱距离分布函数进行非刚性匹配的形状相似性热力图.为了区分不同类形状的差异性,本文采用最常用的欧氏距离计算一对形状的相似性.
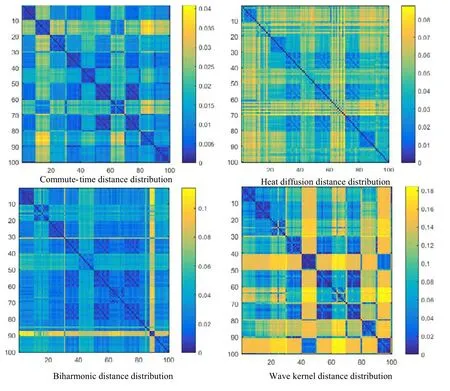
Fig.16 Thermodynamic diagram of non-rigid 3D shape matching using four spectral distances based on SHREC 2015 database图16 基于SHREC 2015 数据库,应用4 种谱距离进行非刚性三维形状匹配的热力图
如图16 所示(其中,每连续10 个编号表示一类形状,1~10 为centaur;11~20 为ants;21~30 为gorilla;31~40 为Male 0;41~50 为female-thin;51~60 为male 13;61~70 为gdog;71~80 为male16;81~90 为plies;91~100 为malebodybuilder).在4 种谱距离分布函数中:CD 描述了形状的全局属性,因此匹配结果较为集中;HDD 描述了形状的局部属性,且相对于其他3 种谱距离分布函数的匹配性能较差,原因在于HDD 对于时间参数和噪声非常敏感,在实际实验中很难寻找到最优的时间参数;BD 调和地描述了形状的局部和全局属性,且不依赖于时间参数t;WKD 既能描述形状的局部属性,又能描述形状的全局属性,同时,相对于其他3 种谱距离分布函数,WKD 能够精准地描述不同类的形状,对于male0,male13 和male16 的区分度更大.
表7 为应用图16 的结果进行不同类非刚性三维形状检索的查准率,表中结果与图16 结果相一致.

Table 7 Precision ratio of 3D Non-rigid shape retrieval using the distribution function of four spectral distances based on SHREC 2015 database表7 基于SHREC 2015 数据库,应用4 种谱距离分布函数进行非刚性三维形状检索查准率
4.4 问题与展望
通过实验比较了不同谱形状描述符和谱距离分布函数进行非刚性三维形状匹配的性能,可以发现利用基于谱分析的形状描述符进行非刚性形状匹配效果较好.在4 类谱形状描述符中,WKS 和WKD 整体匹配表现性能最优,适用于精细匹配,但时间复杂度较高,不适用于大规模形状的快速匹配;BS 和BD 性能次之,能同时调和地表示形状的局部及全局信息,但过于强调函数同时描述形状的局部和全局性质,也会弱化形状的真实全局和局部特性;HKS 和HDD 对时间参数敏感,所以仅凭某时刻t下HKS 值进行形状的非刚性匹配性能较差,若能比较形状上每个点或部分特征点的一段时间序列下的HKS 值,则能提高匹配性能,且HKS 适用于部分匹配;GPS和CDD 整体匹配度较低,适用于快速匹配和粗匹配,但不适用部分匹配.同时,使用4 种谱距离分布函数进行三维非刚性形状匹配时,无法得到形状部分匹配结果,只能得到一对形状的全局匹配结果,其时间复杂度和空间复杂度也比谱形状描述符复杂度高.在未来的研究工作中,针对不同变化类型的形状(如一些近似等距变化或大变形形状)及不同的应用场景,应结合几种描述符的优点,考虑同时使用多个描述符的权重组合或其他改进,提升非刚性三维形状匹配度.
5 总结
本文给出基于谱分析的形状描述符进行非刚性三维形状匹配的方法流程,详细介绍了几种谱形状描述符和谱距离分布函数,并在以下几方面对比了不同形状描述符的性能:(1) 局部及全局属性;(2) 有无参数及参数选择;(3) 时间复杂度;(4) 最优匹配度;(5) 适用匹配场景;(6) 整体表现性能.通过实验,证明了本文预估的正确性.谱分析是一个易于理解、普适且鲁棒的分析方法,基于谱分析的形状描述符在非刚性三维形状整体匹配中表现出了优异的性能,我们希望提升基于谱分析的形状描述符在非刚性形状匹配中重要的理论意义及并推动其在工程应用价值的发展.同时,在未来的工作中,我们会对基于谱分析的形状描述符进行非刚性三维形状局部匹配进行进一步研究.
