基于单镜头无人机倾斜摄影的建筑物三维模型构建
2019-10-25曹爽,马剑,马文
曹 爽, 马 剑, 马 文
(1.南京信息工程大学 遥感与测绘工程学院,南京 210044;2.广东南方数码科技股份有限公司北方总部银川分部生产实施部,银川 750002)
倾斜摄影测量技术的出现,带动了三维建模技术及其应用的快速发展。倾斜摄影相机是多个摄影镜头的组合体,镜头间的角度、距离必须经过严格的控制,因而制作成本较高,又因其大多都安装在大型无人机上,而大型无人机飞行有诸多限制,对于小区域的影像数据获取并不适用。为满足数字城市快速发展所需的高效、精确的建筑物三维地理信息需求,利用单镜头无人机对建筑物进行多角度拍摄,快速建立建筑物三维实景模型已成为解决这一问题的重要途径之一[1]。
无人机倾斜摄影测量技术已经取得了很大的发展, 其应用价值也在各行各业中有所体现[2]。 许多学者从多个角度进行了研究与探讨:曲林等[3]比较多种倾斜摄影方案, 利用无人机自制镜头获取倾斜摄影数据建立三维模型, 得到了良好的视觉效果; 李翔等[4]通过对获取倾斜摄影数据的几种方法比较, 提出一种采用消费级无人机进行航空倾斜摄影数据采集的方法, 并通过实验验证了该方法的可行性; 曹琳[5]也利用多旋翼单镜头无人机进行了倾斜摄影测量研究, 并总结了无人机倾斜摄影测量获取倾斜影像的特点及内业数据处理的关键技术; Bertram等[6]从建筑物3D建模的角度分析了无人机航摄相较于有人机的成本、 效率优势;陈大凯等[7]尝试将常规的多旋翼单镜头无人机应用于倾斜摄影, 提出了一种采用消费级无人机进行航空倾斜摄影数据采集的方法。
本文基于消费级的大疆单镜头无人机,采用折线型航线影像采集方法和环绕型航线影像采集方法进行建筑物三维模型构建,利用Context Capture 三维建模软件建立建筑物三维实景模型,最后从平面精度、高度精度及线段长度精度三方面对模型进行分析比较,得出不同航摄方案所构建的模型的优越性。
1 单镜头无人机倾斜影像获取方法
传统的倾斜摄影测量都是基于多镜头倾斜相机获取影像,但是随着新的飞行平台、高画质相机、飞控App以及街景工厂、Context Capture等内业处理软件的出现,倾斜影像的采集方式不再单一。单镜头相机和云台三轴配合,视角灵活,能够实现无死角拍摄,而多镜头相机结构相对固定,航拍时无法调整倾斜相机的倾斜角度;在航线规划方面,单镜头无人机倾斜摄影仍然沿用传统倾斜摄影的平行直线航线,但是根据不同的地物,不同的航摄要求,所采用的航线方案也不同,并且单镜头无人机还具有价格优势。本文利用单镜头无人机采用折线型航线影像采集方法和环绕型航线影像采集方法对某高校图书馆进行倾斜摄影,获取其倾斜影像数据。
1.1 折线型航线影像采集方法
折线型航线影像采集方法是指无人机在航拍过程中的飞行轨迹是折线型的,即无人机在飞行过程中相机拍摄时的瞬时位置连接而成的直线航行轨迹,因而折线型航线又称作路径点任务航线,它可以被看作是一系列路径点依次连接而成,无人机在所有路径点处短时间悬停进行拍摄或者边飞边拍摄,如图1所示。折线型航线是一种常用的飞行方案,适用于竖直和倾斜摄影。
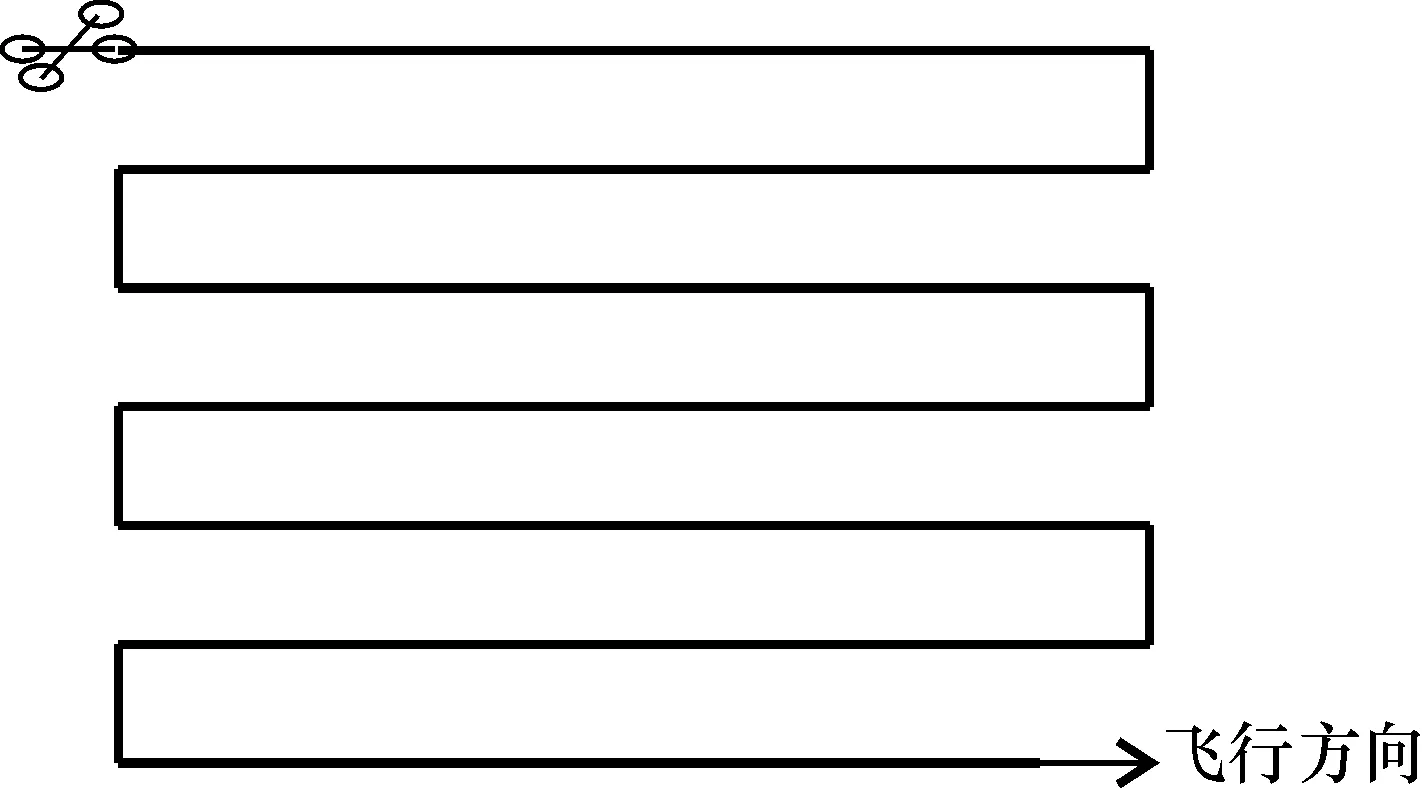
图1 折线型航线示意图Fig.1 Schematic diagram of folded lines
传统的倾斜影像获取方法由于在飞行平台上携带了专业的多向倾斜摄影镜头,针对大范围区域倾斜摄影测量,该方法是最适用的,不仅能同时获得竖直方向和倾斜方向的影像,而且很大程度地缩短了工期,为后期数据处理提供时间保障。由于本次实验区域较小,采用单镜头多旋翼无人机进行影像采集,无法同时获得竖直和倾斜方向的影像,所以需从不同方向敷设折线型航线并多架次采集。如图2所示,本次折线型航线共5条,其中航线1为垂直摄影航线;航线2为自西向东倾斜摄影航线;航线3为自南向北倾斜摄影航线;航线4为自东向西倾斜摄影航线;航线5为自北向南倾斜摄影航线。
1.2 环绕型航线影像采集方法
环绕型航线影像采集方法是无人机在航拍过程中的飞行轨迹是环形的,即通过遥控器控制无人机寻找被摄地物上空一点(俯视图正中心)作为兴趣点,以地物垂直中轴线为环绕轴,设置飞行高度和环绕半径,调整相机倾斜角度,自动控制无人机绕地物环形飞行,手动控制以相同时间间隔拍摄,以保证相邻航片的重叠度,如图3所示。

图2 图书馆折线型航线示意图Fig.2 Schematic diagram of library curve lines

图3 环绕型航线示意图Fig.3 Schematic diagram of circular route
环绕型航线影像采集方法常用于倾斜摄影影像数据获取中。对于独立地物,如独栋建筑、大型雕像、高塔、山顶等,用环绕型航线影像采集方法可有效获取其全方位的侧面信息以及部分地面信息,但是对于大面积建筑群,这种环绕摄影的方法并不适用。由于建筑物的高度不一致,导致影像上的地面采样间隔(GSD)波动较大,并且相邻建筑物之间存在遮挡问题,航拍过程中可能会出现漏拍现象,从而导致侧面信息缺失。如果对每个建筑物进行环绕拍摄,虽然能够获得较为详细的侧面信息,但是大大增加了工作周期,而且由于建筑物的遮挡,无法保证无人机的安全。因此,对于大面积建筑群,采用折线型航线方案较为合适。
1.3 影像采集
实验所需航摄影像采用大疆Phantom 4 Pro消费型多旋翼无人机,依据不同航线方案进行影像采集。所拍摄图书馆建筑物周围道路密集,树木较多,人流量大,考虑到无人机安全问题,选择距图书馆一定距离的操场作为无人机的起降点,并在晴天光线良好的时间段进行数据采集。基于DJI GO4飞控软件控制无人机,相对航高为100 m,航向重叠度为70%,旁向重叠度为60%。
折线型航线拍摄时相机倾斜角度设为45°,共5条航线,首先执行垂直摄影航线,再依次执行倾斜摄影航线。根据建筑物三维建模对其影像的要求,将获取的影像进行筛选,去除无关影像后剩余101张,以减少后期空三处理时间,部分影像如图4所示。
对于单独的建筑物来说,采用环绕型航线飞行方案遥控无人机到图书馆上空,选择兴趣点环绕飞行模式。以图书馆垂直中轴线为环绕轴,让无人机到达指定航高(100 m)位置, 再以无人机所在位置为水平面,控制无人机向图书馆西侧飞行到达指定半径位置(110 m),调整相机倾斜角度为45°,以2 s为拍摄间隔,手动操作连续拍摄,环绕型航线影像采集共计82张影像。部分影像(相邻4张航片)如图5所示。
2 基于单镜头无人机倾斜摄影的建筑物三维模型构建
2.1 像控点布设与测量
外业实测过程中控制点的布设与测量对内业最终成果的精度有很大的影响。 因此, 在选择控制点位置时, 应遵从控制点布设原则并选择合适的布设方案。 运用GPS RTK测量方法+CORS系统测量像控点的大地坐标, 外业像控点坐标测量共计26个点, 点位分布如图6所示, 因图书馆东部树木较多, 坐标数据质量不高, 仅保留1个点, 经过数据预处理之后个别像控点坐标如表1所示。
2.2 建筑物三维模型构建
2.2.1 数据处理 以实验采集的数据作为模型构建的基础数据,包括原始影像和外业实测像控点坐标,通过Context Capture 软件建立图书馆三维实景模型。处理流程如图7所示。
2.2.2 成果生成 经过空三运算之后, 符合精度要求的像控点共计20个, 包括16个检查点和4个控制点。 Context Capture软件的产品输出格式有3MX、 OSGB、 OJB、 S3C等。 本文主要输出3MX格式下的图书馆灰度模型、 TIN模型、 TIN+灰度模型以及三维实景模型。 折线型及环绕型获取的影像, 通过内业处理后得到的成果如图8及图9所示。

图4 折线型航线航摄部分影像Fig.4 Aerial photography of a part of the images

图5 环绕型航线航摄部分影像Fig.5 Partial circular aerial photography

图6 点位分布示意图Fig.6 Diagram of point location distribution
3 精度分析及比较
三维模型的实际精度评定可从模型的平面精度、高度精度、地形精度、DOM精度、模型精细度以及纹理精细度等六方面来评定[8-9]。本文主要从模型的平面精度、高度精度以及代表性线段长度精度方面对图书馆三维模型进行精度评定。

图7 内业处理流程Fig.7 Internal industry processing flow
3.1 平面精度
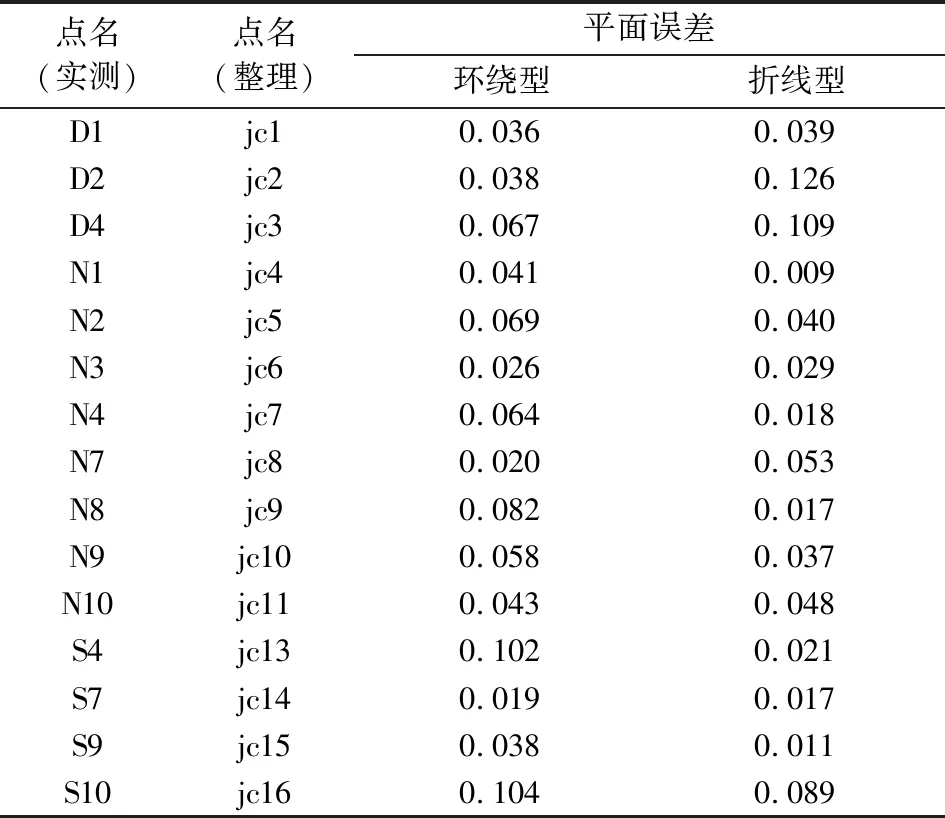
空三解算后,16个检查点的平面误差统计如表2所示。
图书馆三维模型的平面精度分析结果:环绕型航线模型的平面误差最大为0.104 m,最小为0.019 m, 平面RMS为0.065 m; 折线型航线模型的平面误差最大为0.126 m,最小为0.009 m,平面RMS为0.049 m。由图10平面误差分布图可知,环绕型航线模型的平面误差主要分布在0.020~0.080 m,折线航线模型的平面误差主要分布在0~0.060 m。按照三维地理信息模型数据产品规范[10]中7.3节平面精度的规范要求,成图比例尺1∶500时,三维模型的平面精度为0.3 m,本文中的两种模型平面精度均高于规范要求。

表1 个别像控点坐标
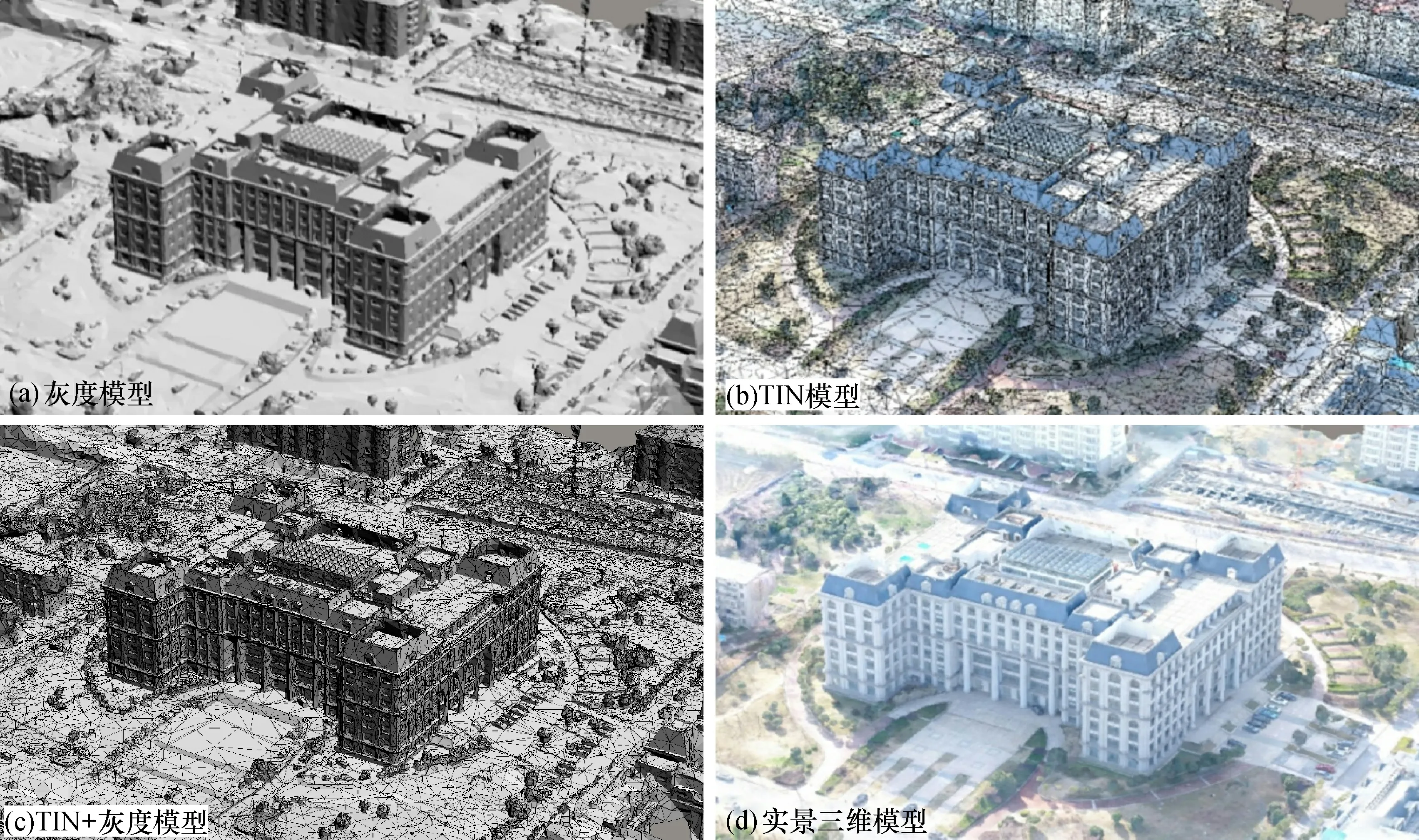
图8 折线型航线图书馆三维模型成果Fig.8 3D model results of the library after the curve line shooting

图9 环绕型航线图书馆三维模型成果Fig.9 3D model results of the library after the airstrip shooting
表2 两种模型的点位平面误差统计
Table 2 Point plan eerror statistics of two models m
点名(实测)点名(整理)平面误差环绕型折线型D1jc10.0360.039D2jc20.0380.126D4jc30.0670.109N1jc40.0410.009N2jc50.0690.040N3jc60.0260.029N4jc70.0640.018N7jc80.0200.053N8jc90.0820.017N9jc100.0580.037N10jc110.0430.048S4jc130.1020.021S7jc140.0190.017S9jc150.0380.011S10jc160.1040.089
3.2 高度精度
空三解算后,16个检查点的高度误差统计如图11所示。图书馆三维模型的高度精度分析结果:环绕型航线模型的高度均方差RMS为±0.080 m;折线航线模型的高度均方差RMS为±0.041 m。按照三维地理信息模型数据产品规范[10]中7.4节高度精度的规范要求,成图比例尺1∶500时,三维模型的高度精度为0.5 m,本文中的两种模型的高度精度均高于规范要求。
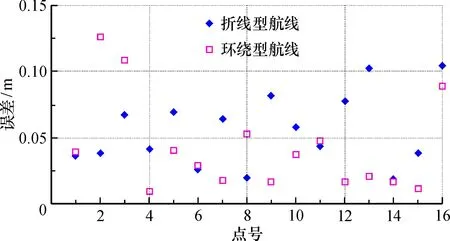
图10 建筑物模型检查点平面误差分布图Fig.10 Plane error distribution of checkpoint in construction model

图11 建筑物模型检查点高度误差分布图Fig.11 Height error distribution of checkpoint in construction model
3.3 长度精度
根据数字城市建设对三维数据的精密要求,不仅需要建筑物的实景化视觉效果,而且对建筑物的面积、 角度、 长度等属性也需要很高的要求。 因此, 本文在模型构建完成后, 又通过外业丈量测得12条线段长度, 与模型上相对应的线段长度进行长度精度分析,如图12所示, 并根据中误差计算公式计算线段长度的中误差。 图书馆模型的长度精度分析结果: 环绕型航线模型的长度误差最大值为0.2 m, 中误差为0.072 m; 折线航线模型的长度误差最大值为0.13 m, 中误差为0.048 m。

图12 模型线段长度与实测长度差值分布图Fig.12 Line length difference between simulated and measured value
综合对两种模型的平面精度、高度精度和长度精度的分析可知,本次图书馆模型构建平面精度与高度精度完全满足规范的规定,且折线型航线模型较环绕型航线模型精度高、效果更好。
4 结 论
本文以单独建筑物为研究对象, 利用多旋翼单镜头无人机, 分别采用折线型和环绕型航线的影像采集方法获取建筑物的影像数据, 结合外业测量的像控点坐标, 通过Context Capture 软件建立建筑物的三维景观模型, 并从模型的平面精度、 高度精度以及线段长度精度三方面对不同航摄方案所构建的模型进行分析与比较可知: 基于单镜头无人机在不同航摄方案下建立的三维景观模型满足三维地理信息模型数据产品的规范; 在本次研究中, 折线型航线方案所构建的模型较为精确。 相较于倾斜摄影机单镜头无人机倾斜摄影成本较低、 空域限制小、 像片分辨率高、 颜色真实, 更有利于倾斜摄影技术的推广, 满足数字城市快速发展所需的高效、 精确的建筑物三维地理信息的需求。
本文的不足之处是未对两种模型的面积、地形精度、DOM精度、模型精细度以及纹理精细度等方面进行评定,在后续的研究将深入分析上述建模精度。另外,对于数据采集方案中,采集过程导致误差的原因分析将是后续工作的重点研究内容。