基于Lipschitz条件的一类非线性时滞广义系统观测器的设计
2019-10-24孙延修黎虹潘斌
孙延修,黎虹,潘斌
(1.沈阳工学院基础课部,辽宁 抚顺 113122;2.辽宁石油化工大学理学院,辽宁 抚顺 113122)
1 引言
系统的观测器设计是控制领域研究的热点,针对非线性系统观测器的研究,近几十年取得了很多的成果,但大多是针对未带时滞的系统观测器的设计[1-4].在社会生活生产的各个方面,如:冶金、网络控制、通信、化工和机械传输等领域时滞现象广泛存在,所以研究时滞系统更具实际应用意义[5-9].文献[4]针对含有Lipschitz非线性项系统的状态不可测量,分别设计了全维和降维观测器.文献[8]针对非线性项满足Lipschitz条件的时滞系统的观测器进行了设计,并对观测器进行了H∞技术性能分析.文献[10]针对一类非线性系统分别设计出了全维、降维观测器,并给出观测器存在的充分条件,通过利用线性矩阵不等式(LMI)求解出了观测器的增益矩阵.文献 [11]针对满足Lipschitz条件的非线性时滞系统分别设计出了全维和降维观测器,并通过对模型的仿真分析证实了观测器设计方法的可行性.文献[12]给出了具有时滞的Lipschitz非线性系统观测器存在的充分条件,并设计出具有扰动的时滞Lipschitz非线性离散系统的鲁棒观测器.
广义系统是一类形式更为一般化的系统,其在电力系统、电子网络、机器人系统、经济等领域有着广泛的应用.随着奇异系统理论的发展,针对广义系统观测器的设计及观测器在故障诊断中的应用具有一定的积极意义[13-15].文献[16]针对一类离散广义时滞系统,通过系统变换结合系统差分方程的特点及范数的性质,给出了状态观测器存在的充分条件.文献[17]针对一类时滞广义系统的全维与降维观测器进行了设计,并给出了观测器增益矩阵的求解方法.文献[18]针对一类时滞Lipschitz非线性离散广义系统,分两种情况对系统进行讨论进而设计出观测器,并给出了相应观测器存在的充分条件.
目前,针对非线性时滞广义系统观测器的设计与研究成果较少.本文针对一类含有Lipschitz非线性项的连续时滞广义系统的观测器进行了设计,利用Schur补引理给出了系统观测器存在的充分条件,最后利用数值算例验证了观测器设计方法的可行性.
2 问题描述
考虑如下非线性时滞广义系统:

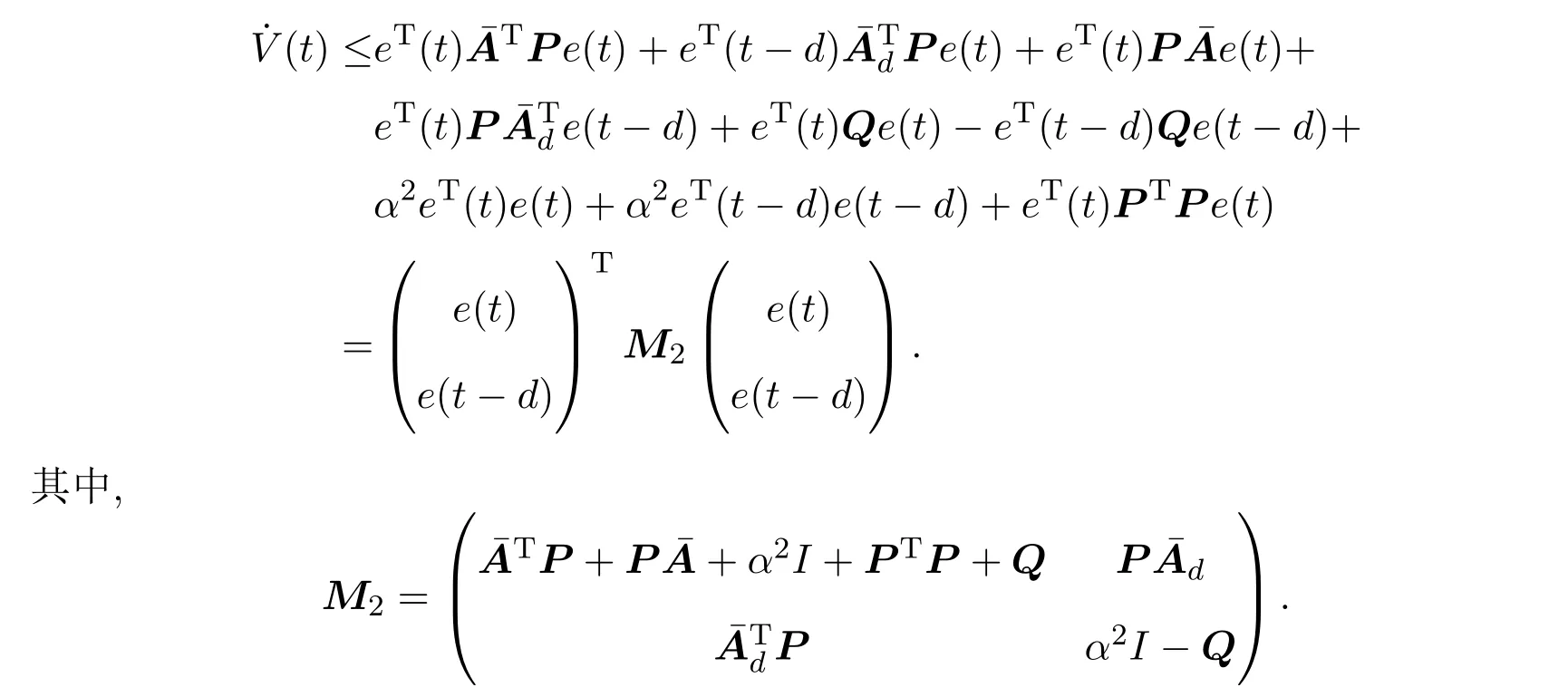
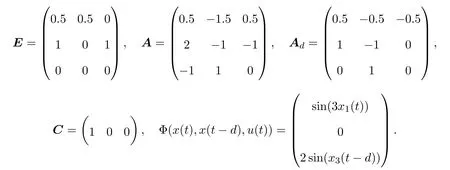
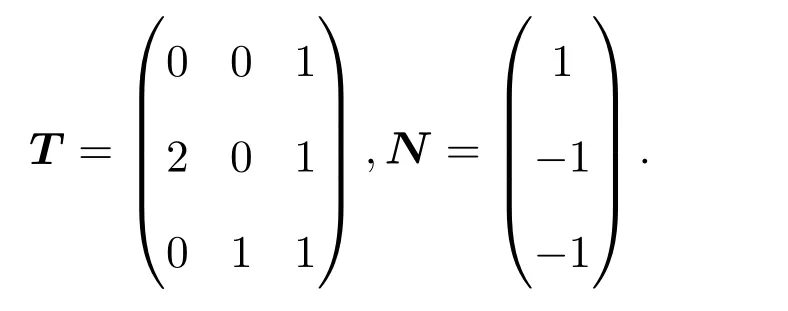
其中,E∈Rn×n为奇异矩阵且满足rank(E)=q 为常数矩阵,u(t)∈Rm,y(t)∈Rp分别是系统的输入和输出. 假设 1系统的非线性项Φ(x(t),x(t−d),u(t)),满足Lipschitz条件,即有 其中,LΦ为大于0的Lipschitz常数. (I)当系统的非线性项等于零时,根据假设2系统(1)可转化为: 进行线性变换z(t)=x(t)−Ny(t),则可以去掉(t)项得 设计如下状态观测器: 令e(t)=z(t)−(t),由观测器(3)与系统(2)使得到的误差系统(4)渐进稳定: (II)当系统存在满足Lipschitz条件的非线性项时,根据假设2系统(1)转化为: 进行线性变换z(t)=x(t)−Ny(t),去掉(t)项式后为 其中,Φ(x(t),x(t−d),u(t))= Φ′(z(t),z(t−d),u(t)). 假设 3系统 (1)经线性变换后得到 (5)式中的非线性项 Φ′(z(t),z(t−d),u(t)),满足Lipschitz条件,即有 其中,LΦ′为大于0的Lipschitz常数.根据假设3设计如下状态观测器: 令e(t)=z(t)−(t),由观测器(6)与系统(5)使得到的状态估计误差系统(7)渐进稳定: 利用线性矩阵不等式(LMI)的方法,考虑时滞广义系统的观测器设计及状态估计误差系统的稳定性问题,得到两个观测器存在的充分条件. 定理 3.1若存在对称正定矩阵P,Q和增益矩阵L,Ld满足下列不等式(8),则(3)式为系统(2)的观测器: 矩阵M1<0等价于定理中的矩阵不等式(8),故∆V<0误差系统渐进稳定,定理得证. 定理 3.2若存在对称正定矩阵P,Q和增益矩阵L,Ld满足下列不等式(9),则(6)式为系统(5)的观测器: 其中,P,Q为对称正定矩阵,X=PT,=PL,d=PLd,α=∥T∥LΦ′为大于零的实数,∗表示对称矩阵中的对称部分. 证明设e(t)=z(t)−(t),则由(5)式和(6)式可得误差系统的状态方程为 根据Schur补引理,矩阵M2<0等价于定理中的矩阵不等式(9),故∆V<0误差系统渐进稳定,定理得证. 注 3.1定理3.1,定理3.2中选取了相同的李雅普诺夫函数,定理3.2考虑到系统含有的Lipschitz非线性项,为了易于求取增益矩阵L,Ld,根据schur补引理将矩阵不等式M2<0变换成与(9)式等价的形式,给出了含有Lipschitz非线性项时滞系统观测器存在的充分条件. 例 4.1考虑时滞广义系统(1)的参数如下: 系统(1)可以转化为(5)式的形式,根据文献[11]中针对增益矩阵的求解方法,利用线性矩阵不等式可以计算得出含Lipschitz非线性项时滞广义系统观测器的增益矩阵: 主要研究了一类含有Lipschitz非线性项的时滞广义系统的观测器设计问题.考虑到广义系统的特殊结构,基于时滞系统观测器的设计方法和线性矩阵不等式的方法,设计出了含Lipschitz非线性项条件下的一类时滞广义系统的状态观测器,并根据Schur补引理给出了时滞系统观测器存在的充分条件和时滞系统观测器增益矩阵的求解方法.最后,通过结合文献[11]中的数值算例验证了含Lipschitz非线性时滞广义系统观测器设计方法的有效性.关于含有非线性项的不确定广义时滞系统观测器的设计则可作为进一步的研究方向.










3 主要结果



4 数值算例

5 结论
