基于北斗/GPS的工程机械车载定位监控系统设计
2019-10-22林俊,廖平
林 俊,廖 平
LIN Jun, LIAO Ping
(中南大学 高性能复杂制造国家重点实验室,长沙 410083)
0 引言
工程机械是现代装备制造业的重要组成部分,是为国民经济建设提供技术装备的支柱产业,对国家经济建设、现代工业化水平的提高以及产业结构战略规划等方面起着至关重要的作用[1,2]。随着国家工业化进程的加快,工程机械大规模使用,而且作业范围不断扩大,这无疑增加了工程机械的监控管理难度,因此研究和开发出一种能够准确确定工程机械的地理位置且能远程进行监控的定位监控系统具有十分重要的意义。
北斗卫星导航系统(以下简称北斗系统)是中国着眼于国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,现已逐步开始对民用市场开放。北斗系统具有短报文通信功能,使得工程机械在作业环境恶劣、通信不佳的情况下仍可保持通信,这为抢险救灾带来极大的便利。考虑到北斗系统现阶段服务区域的限制,本文就上述问题,提出了一种基于北斗/GPS双模定位的工程机械车载定位监控系统设计方案,既能满足工程机械高精度定位导航的需求,又能提供北斗系统与GPS系统的竞争力,有助于推动国家北斗卫星导航产业化的发展[3~7]。
1 定位数学模型
1.1 北斗单系统数学模型
采用伪距法分析北斗单系统定位[8,9],接收端除了接收观测点三个空间坐标分量(x,y,z)外,还有接收端的时钟差,一共有4个未知量,因此,为了求解这4个未知量,需要4颗或4颗以上卫星的伪距测量值,如图1所示。

图1 北斗卫星定位原理
对4颗卫星进行伪距测量得到如下方程组:

为求解方程组(1),本文采用线性化的迭代方法进行求解。假设接收机的近似位置已知,则真实位置(x,y,z)可由近似位置和偏移量来表示,再加上时间偏差估计值则可得到单一近似伪距函数:
方程(2)的解可看作近似分量和增量分量两部分组成,因此有:

对式(3)在近似点处用一阶Taylor级数展开[10]并截去一阶导数之后的项以消除非线性项,经过线性化处理后单一伪距方程可表示为:

因此方程组(1)可表示为:

其中,

方程组(1)的解为:

当采用超过4颗卫星来定位时,用最小二乘法[11]求解方程组,得到方程组(1)的解为:

1.2 双系统联合定位数学模型
同样采用伪距法对北斗和GPS双系统联合定位进行分析。在双系统联合定位前,北斗系统和GPS系统的坐标基准和时间基准需要统一。由于北斗系统采用的CGCS2000坐标系和GPS采用的WGS-84坐标系都是协议地心直角坐标系,其坐标系的原点、尺度和定向都相同,且两个坐标系的精度都达到了5cm,因此对于工程机械的定位而言,两个坐标系可看作同一个坐标系,不需要进行坐标系间的转换。北斗的时间系统和GPS的时间系统采用的时间基准不一致,而组合定位算法是在单系统各自独立定位的基础上扩展而来,定位原理相似,因此通过增加状态变量把各自卫星定位系统的接收模块时钟差当做未知量一起求解,从而使得组合定位系统的时间统一。基于上述原理,在北斗单系统的基础上增加接收模块相对GPS的时钟差未知量,如北斗单系统一样建立伪距方程组,通过线性迭代的方法将方程组线性化,再采用最小二乘法求解方程组中的5个未知量,因此,采用双系统联合定位时观测的卫星数量必须大于等于5颗。
2 定位监控系统总体设计
本文设计的工程机械车载定位监控系统主要由核心处理单元、LCD人机交互界面、定位模块和4G无线通信模块组成,如图2所示。其中定位模块采集工程机械的地理位置、航向、速度等信息;核心处理单元对定位模块采集的信息进行存储处理,并传输至LCD人机交互界面显示;4G无线通信模块则通过UDP网络协议将工程机械的地理位置等信息上传至远程服务器,实现对工程机械的远程监控。

图2 车载定位监控系统总体框图
3 系统硬件设计
系统总体框图如图3所示,本定位监控系统硬件电路采用“核心板+功能板”方案进行设计,核心板电路包含了i.MX6Q核心处理器、2G DDR3内存、8G eMMC存储单元等,实现对整个系统的控制、数据处理存储等功能;功能板电路由供电模块、定位模块、LCD显示、4G无线通信模块等组成,分别用来实现系统各个子功能。
3.1 核心板

图3 定位系统硬件电路结构框图
本文的核心板设计采用工业级汽车处理器i.MX6Q系列高性能处理器,是基于ARM Cortex-A9内核的处理器,拥有四个核心,主频高达1GHz,内部集成UART、I2C、SPI、PCIe等诸多外设,还自带图形加速、音视频编解码等功能,性能强悍,同时支持Linux系统和Android系统,既能满足当前定位系统的功能需求,又便于后期的系统功能扩展和升级。核心板上还扩展了2G DDR3内存和8G eMMC存储单元以保证系统高效稳定运行和数据的存储。
3.2 定位模块
本文的定位模块采用中科微电子的ATGM336H-5N搭建外围电路来实现,如图4所示。引脚11外接GPS天线增强接收卫星信号的强度,引脚4发出秒脉冲,外接发光二极管D2,正常工作时发光二极管以脉冲频率闪烁,便于确定定位模块是否正常工作运行。引脚6外接后备电池,同时提供3.3V电源以保证定位模块得以热启动。定位模块可以与处理器通过I2C或者UART进行通讯,因本系统采用间接数据存储方式,故采用UART与处理器通讯,通过引脚2发送数据给处理器,引脚3接收处理器发送的数据。
3.3 4G无线通信模块
无线通信模块是本地和监控中心进行通信的核心,综合考虑当今的网络通信环境、传输速率以及成本,本文最终采用美芯讯科技有限公司的SIM7100C4G模块作为无线数据传输通信模块。
3.4 LCD显示模块
本系统要求能够本地显示当前地理位置信息,考虑到工程机械的工作环境比较恶劣,因此本文采用7寸TFT高清电容触摸屏,分辨率1024×600,既能清晰地显示所需信息,也能有效地增强抗干扰能力。
3.5 供电电源模块
本系统主要需要12V、5V、3.3V三种电源,其中12V为外部接入电源,5V主要用于LCD供电,3.3V用于给处理器、4G模块、定位模块等功耗相对较低的部分供电。
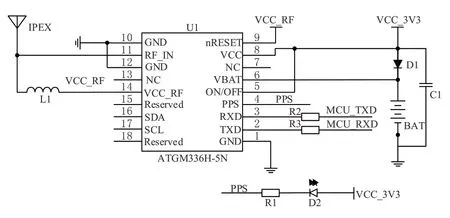
图4 定位电路
5V电源和3.3V电源都是由12V电源利用降压芯片MP1495DJ获得,输出电压与输出电路中的两个电阻参数有关,其计算公式为:


图5 电源电路
以5V电源电路为例,图5即为5V稳压电路的实现原理图。要获得3.3V电压只需更改R1和R2的参数,将图5中R2所标识的电阻阻值由7.5K改为12.7K即可。
4 系统软件设计
本文的系统需要接收ATGM336H-5N双模定位模块的卫星数据信息,对接收的数据包进行解析获得需要的有效数据,并在LCD上显示定位信息及电子地图信息,同时需要向监控中心上传地理位置信息。为满足软件系统的交互性、稳定性等需求,本文采用“Linux+Qt”的方式实现定位系统软件[12],软件系统整体由底层软件和上层应用软件组成。底层软件包括u-boot-2015.04的移植、kernel-4.1.15移植以及Qt根文件系统搭建,上层应用软件则主要由定位部分和4G无线数据传输部分构成。
4.1 定位部分软件设计
4.1.1 定位模块数据输出协议简介
ATGM336H-5N双模定位模块输出数据协议整体兼容国际标准NMEA0183协议,数据格式协议框架如表1所示。
由于ATGM336H-5N模块支持北斗/GPS双模定位,因此输出数据还包含了特殊的协议帧[13,14]:两条地址符相同的$GNGSV协议帧,数据量会随着北斗定位卫星信号强度变化而发生改变的$BDGSV协议帧。
4.1.2 定位模块输出数据解析
ATGM336H-5N模块输出的数据有一定的特点,每个数据包都包含以下协议帧:
$GPTXT、$GNGGA、$GNGLL、$GPGSA、$BDGSA、多条$GPGSV、2条$BDGSV、$GNRMC、$GNVTG和$GNZDA,以上协议帧的输出格式都遵循图4所示的数据格式协议框架。ATGM336H-5N模块输出数据的解析包含了下面四个关键基本步骤:数据包的分割、协议帧的识别、协议帧的分割、协议帧的信息解读[15]。本文数据解析都是基于上述四个基本步骤加上协议帧纠错完成解析的。由于ATGM336H-5N模块连续不断地通过串口发送数据,串口数据容易发生粘包,且MCU定时读取串口数据,接收的数据可能不完整,因而无法直接使用接收的数据,而且数据量也比较大,因此在解析ATGM336H-5N模块的输出数据时增加了处理机制,尽量保存完整的数据,接收并处理数据的过程如图6所示。
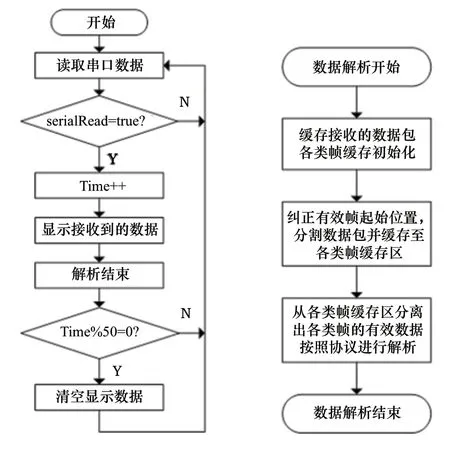
图6 数据处理流程
4.2 无线数据传输部分软件设计
地理位置信息数据利用4G通信模块采用UDP协议上传至远程服务器,数据传输流程如图7所示。

图7 数据无线传输流程

表1 数据格式协议框架
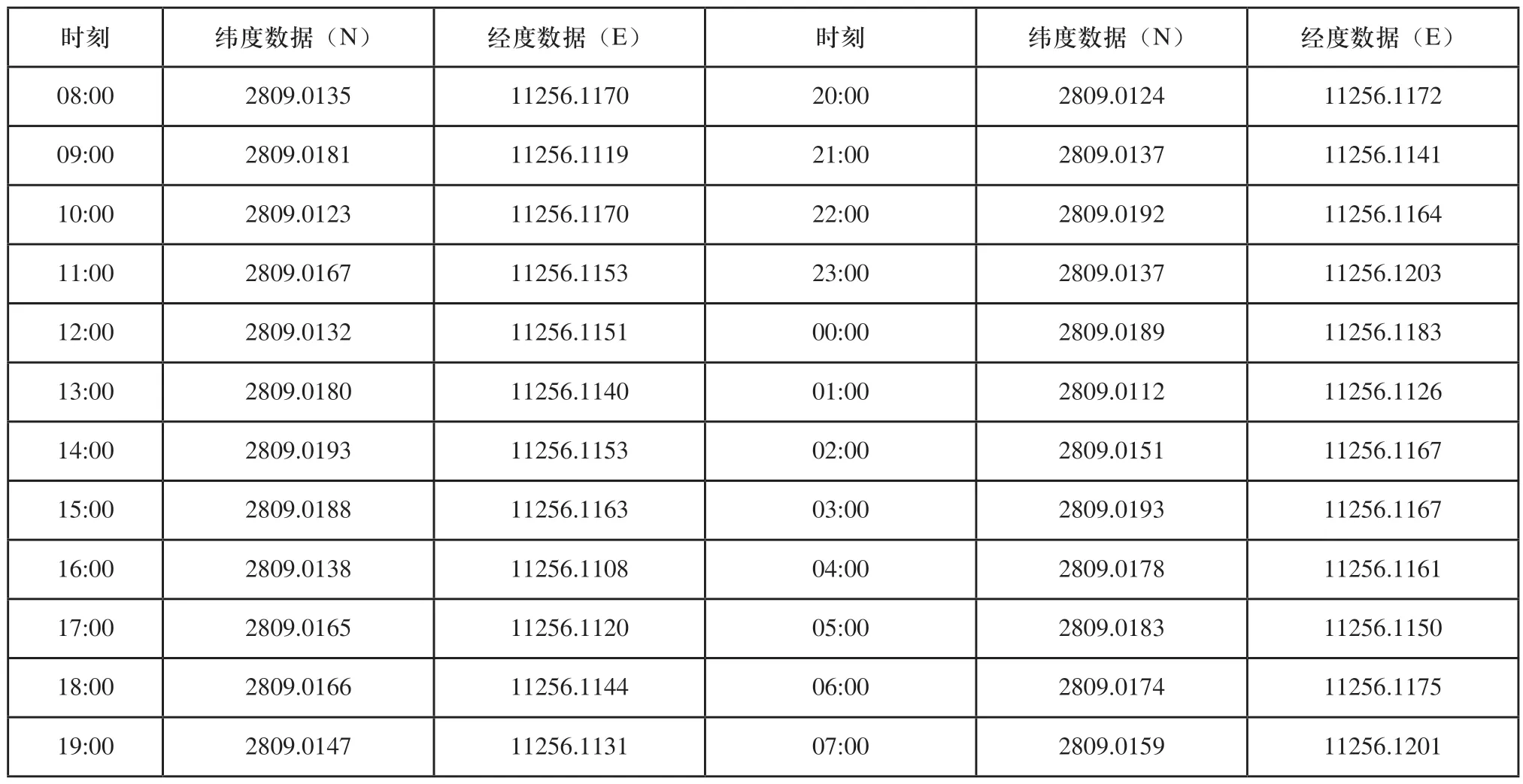
表2 24小时定位监测数据
5 实验验证
为验证文中监控系统的稳定性,从早上8:00至次日7:00每间隔一小时从监控中心读取定位数据信息,实验结果如表2所示,结果表明文中的系统具有良好的稳定性。文中的系统实时定位效果可以在LCD上显示,显示效果如图8所示,达到了预期的要求。

图8 实时定位效果
6 结语
本文设计的基于北斗/GPS的工程机械车载定位监控系统,从硬件和软件两个方面进行设计开发,通过系统试验验证,不仅实现了工程机械的定位导航,还实现了对工程机械的远程监控,极大地方便了工程机械的管理,具有一定的实用性价值。
