棒料冲剪机的运动特性分析
2019-10-21谭晓霞
谭晓霞
摘要: 平面十杆曲柄滑块机构具有对称性机构特点,本论文设计了平面十杆曲柄滑块机构中的一个实例––棒料冲剪机,在给定结构设计参数的情况下,推导出运动表达式,绘制运动曲线,分析棒料冲剪机的运动特性。
关键词: 棒料冲剪机;平面十杆曲柄滑块机构;运动特性
引言
曲柄压力机的工作机构是曲柄连杆,是通过传动系统将电动机的运动和能量传递给曲轴,使曲轴作旋转运动,并通过连杆使滑块产生往复运动。由于机器的导轨与滑块之间存在有间隙,滑块并不会沿其整个导轨长度进行接触工作,而是有一端呈倾斜状态局部接触,造成导轨与滑块上的主动力之间存在一个夹角,而且会随滑块位移而变化的,所以会出现局部接触区上发热、产生很大的接触应力和摩擦力,以致引起导轨面严重磨损,影响滑块的位置精度要求。如果要增加导轨与滑块之间的接触面积,采取在滑块的上、下端部增加弹性边缘,能够减小磨损,降低接触应力和摩擦力,但横向作用力依然会存在着,而且该力还会引起曲柄压力机的横向振动。因此本论文提出了棒料冲剪机,是一种平面十杆曲柄滑块机构,结构具有对称性,当工作阻力作用于滑块的几何中心线上时,滑块与导轨之间没有作用力,从而减轻了导轨的磨损、消除了机架的横向振动,确保了滑块获得长时间的位置精度。棒料冲剪机的设计是根据平面十杆机构的结构特点和运动特性来展开的,设计和制造都较简单,根据设计的參数推导出运动表达式,并计算出相应的运动分析结果,棒料冲剪机设计实例表明了该种机构用作为机械压力机工作机构的优越性。
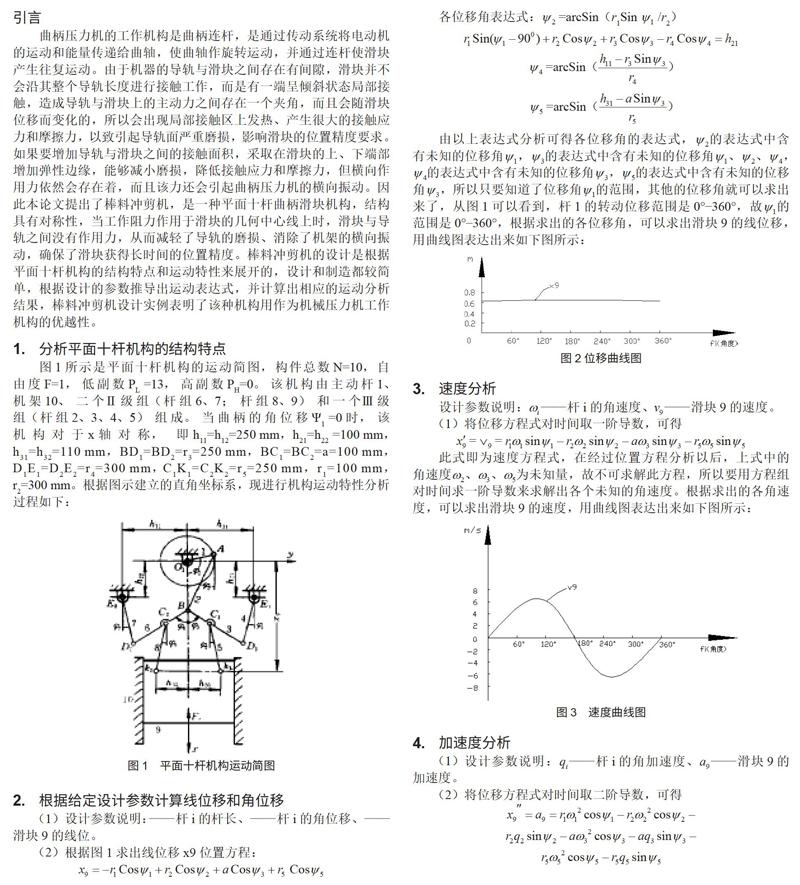
分析平面十杆机构的结构特点
图1所示是平面十杆机构的运动简图,构件总数N=10,自由度F=1,低副数PL =13,高副数PH=0。该机构由主动杆1、机架10、二个Ⅱ级组(杆组6、7;杆组8、9)和一个Ⅲ级组(杆组2、3、4、5)组成。当曲柄的角位移Ψ1 =0时,该机构对于x轴对称,即h11=h12=250mm,h21=h22 =100mm,h31=h32=110mm,BD1=BD2=r3=250mm,BC1=BC2=a=100mm,D1E1=D2E2=r4=300mm, C1K1=C2K2=r5=250mm,r1=100mm,r2=300mm。根据图示建立的直角坐标系,现进行机构运动特性分析过程如下:
由以上表达式分析可得各位移角的表达式,的表达式中含有未知的位移角,的表达式中含有未知的位移角、、,的表达式中含有未知的位移角,的表达式中含有未知的位移角,所以只要知道了位移角的范围,其他的位移角就可以求出来了,从图1可以看到,杆1的转动位移范围是0°–360°,故的范围是0°–360°,根据求出的各位移角,可以求出滑块9的线位移,用曲线图表达出来如下图所示:
此式即为速度方程式,在经过位置方程分析以后,上式中的角速度、、为未知量,故不可求解此方程,所以要用方程组对时间求一阶导数来求解出各个未知的角速度。根据求出的各角速度,可以求出滑块9的速度,用曲线图表达出来如下图所示:
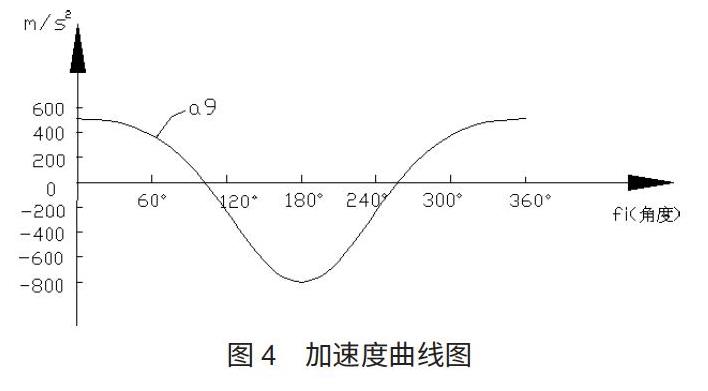
此式即为加速度方程式,在经过速度方程式分析以后,上式中的角速度、、为未知量,故不可求解此方程,所以要用方程组对时间求一阶导数来求解出各个未知的角加速度。根据求出的各角加速度,可以求出滑块9的加速度,用曲线图表达出来如下图所示:
结论
本设计通过分析平面十杆曲柄滑块机构对称性的结构特点,根据给出的参数来推导出棒料冲剪机的有关表达式,用CAD软件绘制运动曲线图,根据直观的运动线图,它可以查得任一瞬时机构的运动参数,并可以清楚地看出机构的运动变化情况,这使得分析过程清晰明了,更容易理解棒料冲剪机的工作原理。
参考文献
杨群,机构压力机的基础知识[M].北京:电子工业出版社,1990.
李作有等译,曲柄压力机译文集[A].北京:机械工业出版社,1990.
王洪欣,聂如春,弯家立,等.一个平面十杆曲柄滑块机构传动的研究[J],机械设计,1998.
