室内定位研究方法综述
2019-10-18王星星丛思安
王星星 丛思安
摘 要:基于位置的服务对用户位置精度要求越来越高,现有室外定位技术已无法满足要求,因此室内定位研究具有重要应用价值。分析了室内定位特殊的环境因素,阐述了室内定位的基本原理、实现步骤与方法,重点分析了目前广泛使用的指纹定位技术及相关改进方法,总结了室内定位研究趋势。
关键词:室内定位;环境因素;指纹定位
DOI:10. 11907/rjdk. 182861 开放科学(资源服务)标识码(OSID):
中图分类号:TP301文献标识码:A 文章编号:1672-7800(2019)009-0009-04
Review of Study Methods of Indoor Positioning
WANG Xing-xing,CONG Si-an
(College of Information Engineering, Minzu University of China, Beijing 100081, China)
Abstract: The continuous development of location based service(LBS) puts forward higher requirements for the accuracy of users' position. The existed outdoor positioning technology has been unable to meet the demands of positioning accuracy, so the research of indoor positioning shows important application value and significance. This paper concentrated on inducing the general methods and procedures of indoor positioning to provide the study methods to beginners in the field. Firstly, this paper analyzed the environmental factors that affect indoor positioning; secondly, it expounded the technologies, implementation methods and algorithms of indoor positioning; thirdly,it focused on fingerprint location technology as well as its improvements. Finally, this paper summarized the research trends of indoor positioning.
Key Words: indoor positioning; environmental factors; fingerprint location
0 引言
研究表明,人們有超过80%的时间位于室内,因此提供精确的室内位置信息对生产生活具有重要意义[1]。随着物联网及无线传感器网络的发展,基于位置的服务(Location Based Services,LBS)应用越来越广泛,这对室内定位精度提出了更高要求。
室内定位技术研究最早可追溯到1996年美国联邦通信委员会制定的E-911定位标准,之后室内定位技术得到快速发展[2]。室内定位包含两个基本要素:环境因素和定位实现。一个优良的室内定位方法并不仅限于追求高的定位精度,还应包括高精度、低功耗、低成本、隐私保护和信息安全几个方面 [3]。
1 环境因素
室内环境的特殊性使得原有的GPS信号发生中断,因此在室内继续采用GPS技术难以实现精准定位。室内环境的复杂性对定位的影响主要体现在两个方面:①环境变化引起的定位精度下降;②原有语义信息失准[4]。
一方面,信号在室内传播时由于衰减、非视距传播(Non-Line of Sight,NLOS)、反射、衍射、多径等造成信号强度不稳定,从而引起定位误差。墙体等建筑的厚度、材质以及结构、室内人员的密度、人员活动、室内温度及湿度的变化也会对无线信号的强度造成一定程度的干扰[5];另外在采集信号时,移动设备的型号、用户手持移动设备的方向以及人体遮挡,甚至是采集时间不同也会导致信号强度存在差异和不稳定性。
另一方面,基于室内环境的语义信息,如房间编号、区域、功能等信息会随着时间及环境变化而发生变动,从而使原有的语义信息和基于语义所提供的位置信息精确度下降。
2 定位实现
应当根据具体环境设计合理的方法实现定位,方法一般包括位置估计和位置跟踪两大类。位置估计指目标当前所在位置的估计,位置跟踪指一段时间内移动目标的运动轨迹,它在时间上具有移动性和连续性。
无论是哪种定位,都遵循以下两个基本操作流程:
(1)根据客观环境选择合适的定位技术,常用的定位技术包括ZigBee技术、射频识别技术(Radio Frequency Identification, RFID)、超宽带技术(Ultra Wideband, UWB)、WiFi 技术、地磁、惯性传感器、可见光等[3-4]。
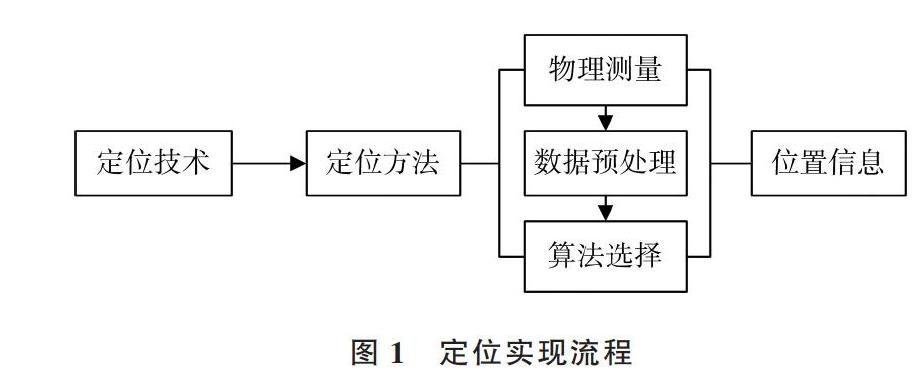
(2)确定定位方法。定位方法分为3个步骤:①物理测量,根据定位技术收集定位所需要的数据;②数据预处理,对采集到的数据进行降噪、降维等处理,使数据更加符合算法要求;③算法选择,确定位置信息的计算规则并最终实现位置估计或跟踪。具体流程如图1所示。
2.1 定位技术
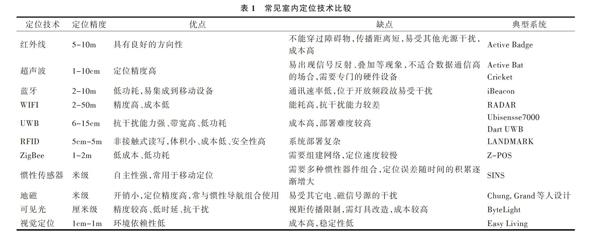
定位技术广泛应用于室内定位中,文献[7-9]对主流定位技术进行了详细描述,表1概括了常见定位技术的定位精度、优缺点及典型系统。
2.2 定位方法
2.2.1 物理测量
物理测量手段中任何具有位置区分性的信号,如声、光、电磁波、视觉信号等都可以用于定位。信号的位置可区分性越高,则达到的定位精度就越高,如超声波、声波等传播速度慢的信号可以达到厘米级精度,而无线电波传播速度快,精度最多可以达到米级。基于测距的定位通常需要精确测量信号在发射端和接收端的传播时间,指纹定位则需要测量来自各信源节点的信号强度。
2.2.2 数据预处理
室内定位数据预处理主要是对参考節点及待测节点收集到的数据进行降噪处理。
由于室内复杂环境的干扰导致接收信号不稳定,因此需要过滤掉采集信号中的异常值。常见的滤波算法有均值滤波、高斯滤波、小波去噪、卡尔曼滤波等方法。文献[10]采用均值滤波法对同一位置采集的多条信号强度信息求均值,保留较稳定的信号强度;文献[11]采用高斯滤波去噪。假设测量的信号强度服从高斯分布,利用该分布过滤掉小概率信号强度的干扰;文献[12]采用小波去噪的方法将信号与噪声分解并过滤掉噪声;文献[13]采用卡尔曼滤波过滤掉多径效应造成的异常值。
2.2.3 算法选择
室内定位主要集中在位置估计和位置跟踪两个主要方面。位置估计算法利用已知位置的参考点对待测点进行位置预测。位置跟踪算法则需要实时追踪待测点的位置信息并获得位置轨迹。位置估计是对静态位置的估计,而位置追踪则是移动定位,因此它们在算法选择上也具有较大的差异性。
(1)位置估计。①测距定位:基于测距的定位算法通过特定的测距技术获得待测点与已知位置的参考点之间的距离,并借助它们之间的几何关系估计待测点的位置信息,常用算法包括到达时间技术(Time of Arrival,TOA)、到达时间差技术(Time Difference of Arrival,TDOA)和到达角度技术(Angle of Arrival,AOA)等[3,14];基于测距的方法通常需要部署专门的硬件设备,测量过程也较复杂,而且需要建立复杂的传播模型和衰减模型,该模型需要综合考虑多径传播、墙体反射、人体干扰等诸多因素,因此采用简单的非测距方法更为普遍;②非测距定位:非测距定位通常用指纹定位进行位置估计,指纹定位在实施上更容易实现,因此应用广泛,但是前期需要投入大量的人力和时间进行数据收集和数据处理去构建指纹库。
(2)位置跟踪。位置估计是一种静态估计方案,它没有考虑待测点的移动性,但位置跟踪具有时间属性,通过历史移动状态对当前位置进行预测,常见算法有凸近似定位、移动基线定位、蒙特卡洛定位(即粒子滤波器)[3]和卡尔曼滤波系列[14]算法。
位置跟踪常见问题是误差累计。由于当前位置的计算是基于前一刻的数据预测得到,每次位置预测都会产生一定误差,且随着时间的推移误差会逐步增大,这是位置跟踪定位不精确的主要原因。
3 指纹定位
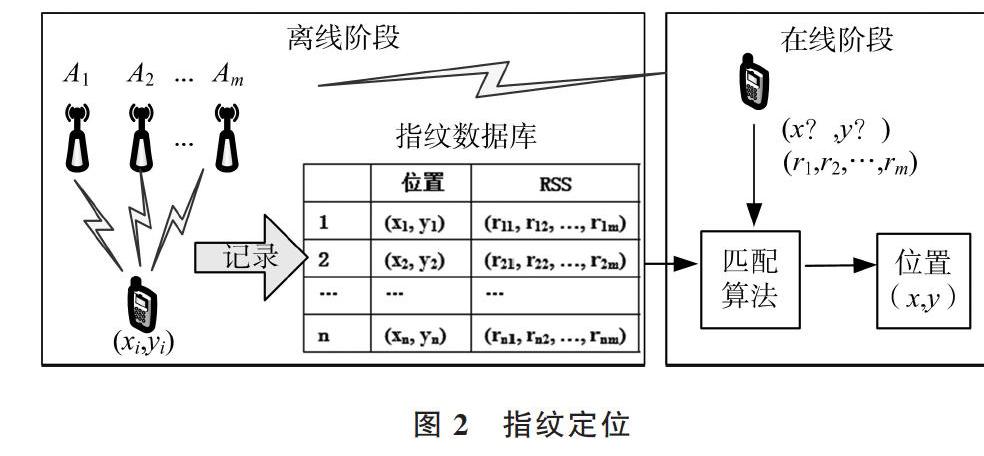
指纹定位利用信号强度随传播距离衰减的特征,将所处位置接收到的各个锚节点信号强度指示(Received Signal Strength Indication,RSSI)作为当前位置的唯一标识(指纹),主要包含离线训练和在线定位两个阶段,如图2所示。
离线阶段在已知的参考点上获取接收到的锚节点信号强度,构成 “位置-信号强度”指纹向量,完成指纹库构建;在线阶段将待测点收到的各锚节点信号强度与指纹库中指纹向量包含的信号强度进行匹配,找到相似度较大的指纹向量,并利用指纹向量对应的位置信息估计待测点位置[3]。
3.1 离线训练
设锚节点有m个,记为[A1],[A2],…,[Am],已知位置的参考点有n个,离线训练阶段对每个参考点收集信号强度,建立位置-信号强度指纹库I,[ri]表示参考点的信号强度向量,[li]表示参考点的位置向量,则有
I={([r1], [l1]),([r2],[l2]),…,([ri], [li]),…,([rn], [ln])}
n表示参考点个数
[ri]=([ri1,ri2,?,rij,?,rim])
m表示锚节点的个数
[li=(xi,yi)]
其中[rij]为第i个参考点上接收到的来自第j个锚节点的平均信号强度。由于信号不稳定,通常需要在同一个参考点上对信号进行多次测量,然后对多次测量的结果进行降噪处理并求取平均值。
一般离线阶段只要构建出与环境相符的指纹库即可。为进一步提高指纹定位精度,可通过以下3方面对离线阶段进行改进。
(1)对参考点信号进行降维处理。离线阶段收到的信号都来自锚节点(如WiFi定位中的AP),虽然锚节点数目越多在一定程度上越能提高定位精度,但过多的信号发射结点易导致它们之间发生信号干扰,同时计算复杂度也会较高,因此要对参考点收集到的信号进行降维。降维后,[ri]=([ri1,ri2,?,rim]),降低维度为:[ri]=([ri1,ri2,?,rik]),其中k≤m。相应地,若离线阶段进行了降维处理,在线阶段采集的信号也应进行降维处理。
常见的降维方法包括选择法和特征提取法。选择法设定一个衡量标准,如对应信号强度大小[15]、信源之间的分散度、最大信息熵、互信息最小化[16]、离散注水优化模型[17]等,然后根据设定的标准对信源进行筛选。特征提取法通过算法选出具有代表性的信源,常见的算法有主成分分析法(CPA)、线性判别分析(LDA)和独立成分分析(ICA)以及核函数法,核函数方法充分考虑了线性及非线性特征[18]。
通过上述方法,能够筛选出具有代表性的特征向量,在降低计算复杂度的同时提高定位精确度。
(2)根据已知参考点信号对指纹空间进行扩充。一般指纹库中采集的参考节点指纹信息越多,定位精度也会越高,但大量的指纹采集工作会耗费较高的时间、人力和物力成本。为有效解决指纹库密度与构建成本的矛盾,研究人员提出了指纹补偿思想,即利用现有参考点的指纹信息模拟邻近点的指纹信息,该方法能有效扩充指纹空间,有利于降低指纹采集成本。常见的补偿方法包括克里金插值[13,19-20]、矩阵补全原理[21-22]和神经网络预测[23-24]等方法。
(3)采用聚类算法降低搜索空间。由于指纹空间较大,在线阶段若直接将待测点指纹与指纹库进行匹配,需要遍历整个指纹库,计算复杂度较高且定位效率低。为了降低搜索空間,离线阶段构建指纹库时通常采用K-means、DBSCAN等聚类算法[12-14]。以聚类为主的方法实际上体现了一种先进行粗定位、再进行细定位的思想。粗定位能够有效提高定位效率,细定位确保了高定位精度,二者达到平衡。
3.2 在线定位
指纹定位主要通过训练匹配模型,将待测RSS信号与指纹库信号进行匹配,以估计待测点位置。匹配模型通常采用机器学习算法,主要包括3类:①确定性定位算法:直接计算待测位置的指纹与指纹库中每一条指纹数据之间的向量距离,选取距离待定位点最近或多个参考点的位置,计算待测点位置,如最邻近法(NN,KNN,WKNN);②概率型定位算法:将测得的指纹库数据按照一定的模型转化为概率分布的形式实现定位,如朴素贝叶斯算法、最大似然概率法、直方图法及核函数法等[25];③人工神经网络定位算法:该算法不必事先知道输入(信号强度)与输出(位置)之间的数学模型,通过隐层堆叠及每一层对上一层的输出进行权重优化的学习机制完成位置估计,具有很好的函数逼近功能,常见的如BP神经网络[26-29]、深度信念网络等算法。此外,支持向量机算法等机器学习算法[30]也广泛应用于定位。
4 研究趋势
目前尚没有成熟稳定且广泛应用的高精度室内定位技术,提高定位精度在很长一段时间内仍是室内定位的主要研究方向。
随着无线传感网络及物联网的迅猛发展,采用自组织网络的定位技术会得到深入研究;不同定位技术间的融合能有效克服单一定位技术的局限性,所以融合定位将成为提高精度的主要方法之一。
在指纹定位中,室内环境变化和设备位置移动会导致在线阶段监测的指纹数据与离线阶段建立的指纹数据不一致,因此采用一定的策略对指纹定位中的指纹库进行更新是提高定位精度的有效方法之一。更新指纹库方法有众包更新、将高精度定位结果实时更新到指纹库等方法[31]。此外,位置指纹表征也会趋向多样化,如建立物理临近信息库[32]、收包率[33]、接入数目、移动端方向角[34]等方法。
5 结语
室内定位技术由于其特殊的环境因素带来的多径、反射、非视距等影响,定位难度和复杂度要高于室外定位。在实现定位时充分考虑环境因素影响有助于提高定位精度,从而为用户提供更加精准的基于位置的服务。无论是定位技术的融合或改进,还是定位算法的优化,都为提高室内定位的精度研究提供了方法和技巧。随着定位精度的提高,深入探讨和研究室内定位的功耗、用户隐私及信息安全等问题,有助于室内定位技术的广泛应用。
参考文献:
[1] DENG Z L,YAN P. Situation and development tendency of indoor positioning[J]. China Communications,2013,10(3):42-55.
[2] 王静. 基于信号强度室内定位技术的研究与实现[D].北京:北京工业大学,2009.
[3] 史蒂芬·山德,阿明·达曼.无线通信系统中的定位技术与应用[M].郎为民,译.北京:机械工业出版社, 2016.
[4] 刘云浩.Location, localization and localizability[J].计算机科学技术学报:英文版,2010, 25(2):274-297.
[5] 陈斌涛,刘任任,陈益强,等.动态环境中的WiFi指纹自适应室内定位方法[J]. 传感技术学报, 2015(5):729-738.
[6] 赵锐,钟榜,朱祖礼,等. 室内定位技术及应用综述[J]. 电子科技, 2014,27(3):154-155.
[7] 关欢. 无线网络室内定位技术的设计与实现[D]. 上海:上海交通大学, 2015.
[8] 邓中亮,尹露, 唐诗浩,等. 室内定位关键技术综述[J]. 导航定位与授时,2018(5):88-92.
[9] 徐盛良,鲁照权,周永燕,等. 基于超声波测距的室内定位系统[J]. 机械设计与制造工程,2017, 46(11):112-116.
[10] LENG Y F, ZHU H P, ALSHARARI T, et al. An improved RSSI positioning algorithm based on reference distances[J]. Advanced Materials Research, 2014(971-973):1547-1552.
[11] WANG Y, ZHAO Y, MUHAN L I. Application research of Gauss filter in Zigbee indoor positioning[J]. Journal of Geomatics, 2016(1):512-517.
[12] GONG P, MAO Y, DU Y. An UWB indoor location algorithm based on wavelet de-noising[J]. Microcomputer & Its Applications, 2015(6):66-69.
[13] 章晓强,方飞,应可珍,等. 一种基于插值的室内指纹定位系统设计与实现[J]. 传感技术学报,2017, 30(4):596-602.
[14] 方旭明. 基于自适应卡尔曼滤波器的WSN定位算法研究[D]. 南京:南京大学, 2017.
[15] 刘乾辰,徐昌庆,祝正元,等. 一种改进的无线局域网位置指纹定位法[J]. 信息技术, 2014(7):140-142.
[16] 张伟,花向红,邱卫宁,等. WiFi指纹定位的一种新组合算法[J]. 测绘工程, 2017, 26(3):14-18.
[17] 周牧,蒲巧林,田增山. 室内WLAN定位中位置指纹优化的接入点部署方法[J]. 通信学报,2015, 36(s1):30-41.
[18] 周志华,王珏. 机器学习及其应用[M]. 北京:清华大学出版社, 2007.
[19] 毛科技,方凯,戴国勇,等. 采用Kriging的WSN多维度向量指纹定位算法研究[J]. 小型微型计算机系统,2016,37(11):2514-2519.
[20] 郭红成,罗海勇,尹浩,等. 基于線性插值和动态指纹补偿的分布式定位算法[J]. 传感技术学报, 2009, 22(12):1795-1801.
[21] CHANG L, XIONG J, WANG Y, et al. Lupdater: low cost RSS fingerprints updating for device-free localization[C]. International Conference on Distributed Computing Systems,2017:900-910.
[22] 沙朝恒,肖甫,陈蕾,等. 一种基于矩阵补全的室内指纹定位算法[J]. 计算机科学,2016, 43(6):91-96.
[23] 韩晓晓. 基于RBF神经网络的动态射频地图建立方法研究[D]. 太原:太原科技大学,2015.
[24] 吴东金,夏林元. 面向室内WLAN定位的动态自适应模型[J]. 测绘学报, 2015, 44(12):1322-1330.
[25] 张文学. 基于WiFi的RSSI指纹定位算法研究[D]. 成都:电子科技大学, 2015.
[26] 李瑛,胡志刚,刘洋. 一种基于BP神经网络的室内定位模型[J]. 计算机应用,2007, 27(b06):56-57.
[27] 李丽娜,梁德骕,马俊,等. 基于灰色-RBF神经网络的传播损耗模型训练[J]. 计算机应用与软件,2016,33(8):136-140.
[28] 石晓伟,张会清,邓贵华. 基于BP神经网络的距离损耗模型室内定位算法研究[J]. 计算机测量与控制, 2012, 20(7):1944-1947.
[29] 吴东金,夏林元. 面向室内WLAN定位的动态自适应模型[J]. 测绘学报,2015,44(12):1322-1330.
[30] 李福坚,吴黎明. 一种改进的支持向量机的室内指纹定位技术[J]. 自动化与信息工程, 2014,35(4):29-33.
[31] 李燕君,徐凯锋,邵剑集. 利用众包更新WiFi室内定位指纹库的方法研究[J]. 传感技术学报, 2014(12):1692-1698.
[32] 周牧,张巧,邱枫. 基于物理邻近点辅助的无线局域网指纹定位方法[J]. 计算机应用,2014, 34(6):1563-1566.
[33] 张金艺,张晶晶,李若涵,等. 流水线型局部加权回归RFID室内定位[J]. 应用科学学报, 2014(2):125-132.
[34] 刘志鹏,袁敏. 一种基于WiFi的改进型室内位置指纹定位方法[J]. 计算机与现代化, 2016(4):36-39.
(责任编辑:杜能钢)