高超声速边界层转捩高速纹影显示
2019-10-09陈苏宇张扣立
陈苏宇,常 雨,江 涛,李 强,张扣立
(中国空气动力研究与发展中心超高速空气动力研究所,绵阳 621000)
0 引 言
边界层转捩对高超声速飞行器表面的热流和摩阻等影响显著,研究边界层转捩无论是对飞行器设计还是对气动机理的理解都十分重要。传统的地面试验主要依靠接触式测量技术来获得边界层的特性,比如压力和热流测量。随着测试技术的发展,纹影显示方法的时间和空间分辨率都显著提高,近年来比较多应用到边界层转捩过程的研究中。
近十年来,以美国Maryland大学、Sandia国家实验室、德国DLR和比利时VKI的研究人员为代表,开展了一系列借助高速纹影手段研究高超声速边界层转捩的工作[1-9],试验风洞主要涉及静音风洞、高焓激波风洞和长射风洞,马赫数跨度从Ma5到Ma14,主要以半锥角为7°的圆锥作为研究模型。VanDercreek等[1]较早通过聚焦纹影捕捉到了多种试验状态下的边界层第二模态波的空间结构,但其图像清晰度仍有待提升。Laurence等[2]则率先利用高时间分辨率、低曝光时间、连续光源的常规纹影系统获得了连续的、有清晰第二模态波结构的纹影图像序列,证明了通过纹影手段测量边界层不稳定波的时空发展特性的可能性,不久Laurence等[3]采用激光作为光源的纹影系统同样也获得了较好的结果。Kennedy等[4]发展了对纹影图像的空间数据进行时间域的重构方法,由此得以分析边界层某个固定位置功率谱密度特性并与高频压力传感器测量第二模态波的频谱结果进行对比,符合较好。文献[5-6]开展的高速纹影试验研究第二模态不稳定性增长和破碎为湍流斑的过程,发现在Ma5条件下,第二模态波是间歇产生的,且破碎后成为孤立的湍流斑,夹在未失稳的层流边界层之间;而在Ma8条件下,第二模态波则直接破碎为完全湍流结构。Laurence等[7]开展的高焓条件下转捩试验采用了激光光源的短时脉冲间隔模式,实现了超过相机帧频的时间分辨率,以匹配高焓条件下边界层扰动的主频率相比低焓更高的情况。Bonucci等[8]在长射风洞中开展了高速纹影试验,通过对边界层灰度分布做快速傅里叶变换获得了不稳定波的波长特性。高速纹影显示的结果数据量较大,为此相关的数据处理方法也有所发展[10]。
北京大学的研究人员用纹影方法捕捉到了裙锥边界层的第二模态波及其破碎的过程[11],但国内整体来说在这方面的研究很少。本文利用高速纹影显示技术对圆锥边界层第二模态波序列的发展进行了探究。试验在超高速空气动力研究所的FD-14激波风洞中开展。除了纹影显示外,本文还布置铂薄膜热流传感器测量了一条子午线上的边界层转捩位置,并布置了PCB传感器测量第二模态波的主频。
1 试验条件
1.1 试验设备、流场条件与试验模型
试验在FD-14激波风洞中开展。该风洞属于反射式激波风洞,驱动气体为氢气与氮气的混合气体,被驱动气体为氮气,喷管出口直径0.6 m。通过更换喉道可实现模拟马赫数范围为6~12,通过调整总压可实现模拟雷诺数范围为2.1×105~6.5×107m-1,有效试验时间2~13 ms。试验的自由来流的参数如表1所示。

表1 自由来流不同状态参数Table 1 Free-stream parameters of different conditions
1.2 试验模型与传感器
试验模型为半锥角7°的圆锥体(见图1),轴向长度598.4 mm,头部钝度Rn可变,分别为0.2 mm,0.5 mm和2 mm。所有试验状态的模型攻角均为0°。一共布置3个PCB 132A31型压电式传感器、6个Kulite XTE-190M型压阻式传感器和14个铂薄膜热流传感器。所有传感器的采样频率设置为3 MHz。试验中模型表面为等温壁,壁温Tw=297 K。定义x方向为锥模型的中心轴向,指向下游为正。

图1 试验模型风洞安装照片Fig.1 Photo of test model in shock tunnel
1.3 纹影系统
试验中使用的纹影系统光路如图2所示。光源为连续光源。高速相机的工作帧频为100 kHz,曝光时间不超过200 ns,这样的曝光时间足以捕捉到第二模态波的瞬态结构。相机分辨率为1024×186 pixels。单位长度内包含的像素为4.15 pixel/mm,足够分辨特征尺度不小于1 mm的扰动结构。刀口水平布置,刀口外法向竖直朝上。

图2 纹影系统光路图Fig.2 Optical sketch of schlieren system
2 试验结果分析
2.1 热流测量结果
所有试验状态的铂薄膜传感器测量的热流分布结果如图3所示。所有热流测点位于同一子午线上。以热流有较明显跃升(相对层流圆锥边界层热流沿下游单调递减的趋势)以及单点热流时域特性作为转捩起始的判定依据[12],可知对于状态A来说,整个测量范围内边界层几乎保持为层流状态,仅在模型尾部(x>550 mm)有轻微的转捩迹象。就状态B的结果而言,由于单位雷诺数提高了三倍多,转捩位置明显提前,钝度对转捩的抑制作用也较为明显。
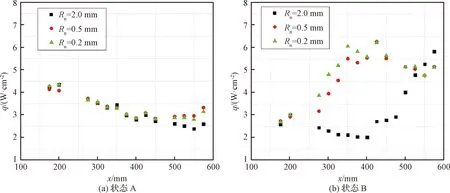
图3 锥模型子午线热流分布Fig.3 Heat flux distribution on the meridian of cone surface
2.2 第二模态波发展的一般特性
图4、图5(每个状态有连续六帧纹影图像)给出了几种试验状态下经过简单的图像增强处理的边界层纹影图像序列,图像增强的方法为:把灰度值最大的1%的像素点设为饱和灰度值,把灰度值最小的1%的像素点设为0灰度,剩下的数据按原灰度相对关系放大至0到饱和灰度值的区间,从而得到对比度更大的新图像。流动方向从右到左。图4(a)显示了扰动较小的层流边界层,周期性的波动结构并不可见。当头部钝度降低到0.5 mm时,如图4(b)所示,在中下游处出现了一定的“绳状波”[13]迹象。头部钝度继续降低为0.2 mm,如图4(c)所示,下游周期性的“绳状波”特征则更为明显。

图4 状态A下图像增强处理的纹影图像序列(x=304~486 mm)Fig.4 Enhanced image sequence under condition A (x=304~486 mm)
试验状态B的单位雷诺数相比状态A增加到1.6×107m-1。头部钝度为2 mm时,图5(a)中显示的第二模态波的发展已经十分充分,近乎饱和,即将失稳,在接近下游纹影观察视野出口处已经可见第二模态波破碎为湍流结构。需要指出,“绳状波”是一个局部区域,其流向范围大约为5~7个波长,并且在有效试验时间(含数百帧图像)内是间歇性地从上游产生的。Casper等[5]也发现了这种间歇性,但并未作出解释。本文认为,这种间歇性可能和第二模态波发展本身包含不同阶段有关,“绳状波”代表了第二模态波发展后期的饱和阶段,其周期性结构通过纹影得以显现,而“绳状波”上游边界层的灰度起伏并不明显,该区域对应第二模态波发展的早期,这点从后文PCB结果(见图9)可以获得佐证,x=288 mm处,在第二模态波主频附近仍然可以见PSD曲线明显的波峰结构,这说明第二模态波扰动已经有一定的幅值,并且一直往下游发展,到x=388 mm处其幅值已经放大了10倍以上。
头部钝度减小到0.5 mm,如图5(b)所示,图像里中下游的边界层已经破碎为完全湍流状态,上游处第二模态波破碎为湍流结构的过程清晰可见。值得注意的是,在上游的湍流斑和下游的完全湍流区之间仍然存在未完全失稳的一段边界层,至少维持了50 μs的时间,这说明在该状态下,边界层转捩经历了第二模态波失稳为局部的湍流斑结构(夹在未失稳边界层之间)再到局部湍流斑与下游全湍流结构融合的过程。头部钝度继续减小到0.2 mm,如图5(c)所示的转捩图景略有变化,即第二模态波直接破碎为湍流结构,并未见孤立的湍流斑。这说明转捩过程相比Rn=0.5 mm时变得更为直接,并且钝度的减小会带来对转捩的促进作用,这和热流测量结果是相互呼应的。

图5 状态B下图像增强处理的纹影图像序列(x=304~482 mm)Fig.5 Enhanced image sequence under condition B (x=304~482 mm)
2.3 第二模态波的波长与传播速度
第二模态波本质上是一种声波[14],根据波的传播原理,如果得到波长和传播速度的数据,就可以计算出其频率。本节主要通过相关的数据处理方法,从纹影图像中进行数据挖掘,计算第二模态波的波长与传播速度。根据第2.2节的结果,只分析结果图像中包含第二模态波和未见明显扰动层流边界层、不含湍流和湍流斑结构的试验状态,这样可以避免其他流动结构带来的干扰,减小计算误差。
在计算波长时,采用对纹影图像的灰度分布计算功率谱密度(PSD)的分析方法,选择Blackman窗函数,交叠率为50%。顺着流向平行于壁面截取一条直线贯穿整个纹影图像,直线与壁面的距离选定在0.7倍左右的边界层厚度(边界层在视窗中间位置的厚度),记为距离dn=0.7δ,其中边界层厚度为基于纹影图像(即密度梯度)的厚度。以无流场状态下同样位置的直线灰度的平均值作为标准化的参考值,计算该直线上的标准化灰度值的PSD分布,横坐标为“空间频率”,即波数ν(波长的倒数,ν=1/λ),PSD曲线在第二模态波的可能波数范围内(波长一般为边界层厚度的2~3倍[8,10])出现的局部明显峰值特征所对应的波数即为第二模态波的波数。
根据上述方法得到图5(a)对应的PSD曲线如图6所示,t1为图5中第一帧图像对应的时刻,在ν=0.15~0.17 mm-1范围内PSD存在明显高于周边波数的峰值特征,但是每个时刻在该区间PSD最大值对应的波数(本文称为特征波数νpeak)仍存在一定的差异,最小为0.153 mm-1,最大为0.170 mm-1,即计算出来的波长差异最大可达0.66 mm(对应2.7个像素点)。这种偏差的来源可能是:光路积分效应,来流噪声的干扰,光源背景扰动和电子器件本身的噪声等。

图6 状态B下边界层流向截线灰度PSD曲线(Rn=2 mm,dn/δ=0.7)Fig.6 Gray scale PSD curves on a streamwise line across boundary layer under Condition B (Rn=2 mm, dn/δ=0.7)
考虑到有效试验时间内有至少300帧图像需要做分析,仅用人眼逐个识别波峰结构并获取波长值效率太低,本文采用计算机程序进行批量分析,程序的流程图如图7所示,其中局部PSD峰值足够大具体指PSD峰值是无流场状态下同样波数对应的PSD值的5倍以上。图8给出了特征波数的批量处理结果,取出现概率(次数)最多的特征波数的倒数作为第二模态波的波长,注意这个波长值是作为所分析流场范围内和有效试验时间内第二模态波特征尺度在统计意义上的量,对应在特定时间和空间内扰动能量最强的第二模态波的波长。图8中三种试验状态对应的波长依次为5.87 mm,6.30 mm,5.01 mm。

图7 第二模态波的特征波数批量分析流程Fig.7 The flowchart of analysis for characteristic wavenumber of second-mode wave in batch mode

图8 有效试验时间内第二模态波特征波数直方图Fig.8 Histogram of characteristic wavenumber of second-mode wave during effective test time
在计算传播速度Up时,利用互相关算法[15],对有效试验时间内相邻帧的纹影图像做互相关分析。对于零攻角对称旋成体来说,边界层法向的速度分量较小,因此只沿流向做一维互相关分析。第二模态波的传播速度计算结果以及计算误差如表2所示,传播速度的计算相对标准差均在10%以内,传播速度与自由来流速度比值Up/U∞与Kennedy等[4]的研究结果较为一致。

表2 第二模态波传播速度计算结果Table 2 Calculated results of second-mode wave propagation speed
2.4 PCB信号的PSD结果及与纹影的对比
本文给出经过标准化处理的PCB压力信号的PSD值,每个PCB传感器压力信号p′对应的参考压力pe为同一x坐标处(如无传感器则采用线性插值结果)的Kulite传感器测量的壁面压力,即对p′/pe做功率谱密度分析,选择Hamming窗函数,交叠率为50%。其中两个PCB传感器的位置分别为x=288 mm,x=388 mm,在同一子午线上,另外一个传感器与x=388 mm处的传感器位于同一周向线上,周向距离为10 mm,记为d=10 mm。
在单位雷诺数较低的状态A,Rn=0.5 mm时,x=288 mm处在288 kHz附近可见较为明显峰值特征(见图9(a)),x=388 mm处的两个测点PSD幅值在268 kHz和264 kHz附近分别达到局部峰值,两者主频相差无几,且扰动幅值相比上游显著放大,说明此时第二模态波发展已较为充分。当头部钝度下降到0.2 mm时,x=388 mm处的两个测点PSD幅值分别在277 kHz和274 kHz附近分别达到局部峰值(见图9(b)),第二模态波的主频相比Rn=0.5 mm时略有提高。在单位雷诺数较高的状态B,Rn=2 mm时(见图9(c)),第二模态波沿流向从x=288处增长到x=388 mm处,主频由283 kHz下降到271 kHz,幅值则放大了10倍以上,从图5(a)可以看出,该处PCB传感器正处于第二模态波的空间结构基本饱和的位置。

图9 PCB压力信号的PSD结果Fig.9 PSD results of PCB pressure signals
需要指出的是,不管是纹影显示还是压力测量均未发现第一模态波存在的迹象,这和大多数Ma6以上的轴对称流动的转捩研究结果[14,16-17]相同,该类条件下第二模态波占主导地位,而第一模态波的强度十分微弱。
综合上述结果,得到分别基于纹影显示和PCB测量结果计算的第二模态波的主频(见表3)。状态A和B两种状态下纹影视野的中间位置分别为x=393 mm和x=395 mm,与x=388 mm处的两个PCB传感器相距很近,因此将纹影和PCB的结果做对比是可行的。结果显示,两种测量方法对主频的计算结果一致性较好,绝对偏差均在10%以内,这说明了高速纹影方法测量第二模态不稳定性的可靠性。
值得注意的是,上述结果的获得,与第二模态波空间结构的二维特点关系较大[7],这样可以有效降低纹影显示的光路积分效应带来的干扰,从而实现对第二模态波在一定程度的定量测量,纹影显示结果与PCB测量符合较好则证明了这一点。然而在边界层转捩过程中,第二模态不稳定性并不是唯一的影响因素,横流不稳定性以及由人工激励源(比如粗糙带和声学表面结构)产生的扰动对转捩的影响同样不容忽视,横流涡一般来说是三维的,其他类型的扰动结构也以三维居多,因此纹影方法的应用仍然有待进一步的发展,其适用性的拓展还需更多的研究来支撑。

表3 纹影与PCB各自对应第二模态波主频结果Table 3 Fundamental frequencies of schlieren and PCB results
3 结 论
1)在FD-14风洞中开展了Ma10的钝锥边界层转捩试验,应用高速纹影显示技术获得第二模态波演变的空间结构和时域特性,通过空间域的PSD分析和互相关算法得到了第二模态不稳定波的波长和传播速度,实现了一定程度的定量测量。
2)PCB压力测量技术与高速纹影显示技术在测量第二模态不稳定波的主频上符合较好,表明了纹影显示方法测量第二模态不稳定波方面的可靠性。
3)进一步的研究仍需开展,用于拓宽纹影显示方法测量边界层内扰动结构的适用范围。
