实验室环境下三维重建系统的误差模型分析及设计
2019-09-28于立君宗明扬赵玉新
于立君,王 辉,宗明扬,赵玉新
实验室环境下三维重建系统的误差模型分析及设计
于立君,王 辉,宗明扬,赵玉新
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
针对实验教学中三维场景重建过程存在的误差扰动问题,在研究不同参数对误差影响的基础上,提出一种锥体相交几何误差模型,并利用线-圆投影法对该模型进行简化,以此估计出多摄像机立体视觉系统中由量化误差引起的物点定位误差。仿真实验测试表明,该方法具有模型简单、计算量小等优点,适用于多摄像机视觉系统下场景的三维重建。对该模型的仿真实验由学生在实验室中完成,目的是培养学生的创新思维与实际动手能力。
定位误差;锥体相交几何误差模型;线-圆投影法;多摄像机视觉
三维重建[1-2]是计算机实验中建立表达客观世界虚拟现实的关键技术,主要是指对多摄像机下的图像重建三维信息的过程,它有助于人们更好地感知世界。具体方法很多,但每种方法都不可避免地存在误差扰动。而三维重建场景中最基础的是对空间中点的重建,因此分析点重建过程中误差扰动对系统性能的影响,对提高重建精度具有重要意义。目前应对误差扰动问题的方法主要有中点法[3-4]、最优化法[5-6]、正四棱锥相交法[7]及多基线多分辨率立体方法[8]等,而文献[7]中的正四棱锥相交法是估计物点定位误差最常用的方法,但却存在几何模型复杂、计算量大等问题。由此可见,高效准确的误差模型设计已是计算机实验中的一个典型问题[9-10]。为培养学生的创新思维与实践动手能力,本文设计了一种线-圆投影法简化的锥体相交几何误差模型,并在实验中进行了验证。此模型具有简单、计算量小等优点,可指导学生在实际测量中通过设置相机位置及相机焦距等来提高测量精度。
1 三维重建系统的误差分析
1.1 摄像机视场的规定


图1 摄像机视场
1.2 摄像机标定


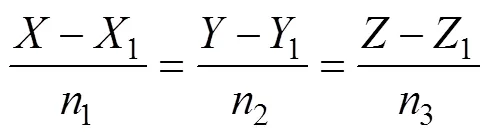
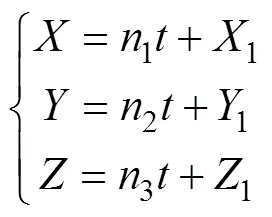
1.3 物点定位误差分析

图2 立体系统中两直线相交
2 误差模型的设计
2.1 锥体数学模型
本文设计锥体相交几何模型用来计算由像素量化造成的定位误差,图3为每个像素点对应的圆锥,其基部为圆形像素点,在此基础上可投影出不确定区域的点。此模型中,用WCS中的圆锥方程可定义一个圆,然后定义一条直线。圆的公式为:

穿过两点的直线方程被定义为:

通过式(6),在摄像机平面上的每个像素都可看作具有不同圆心的圆。因此,一束起点为摄像机的光学中心、穿过圆形像素的射线,可被定义为一个圆锥如图3所示,其中圆锥的空间方程[14]如下:
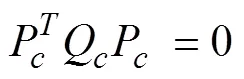

设轴是摄像机的光轴。式(7)在WCS中为:


2.2 线-圆投影法改进的误差模型


图4 线-圆投影法

其中,O是WCS中左摄像机光心坐标,是的方向向量。
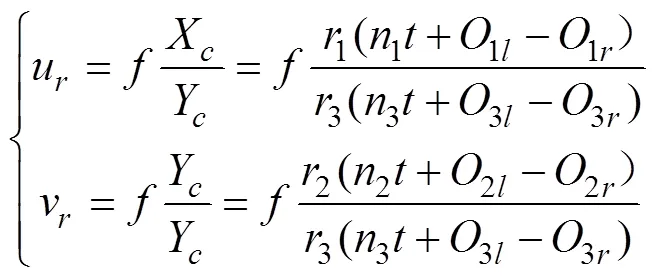
将上述点映射到一个圆形像素中,如下式所示:

2.3 误差模型分析结果
为验证线-圆投影法的正确性,将本文模型与正四棱锥相交法进行误差分析和复杂度比较。图5示出了这两种方法在同一视觉系统下不同基线长度的相对误差曲线,其相对误差定义如下:

其中,为WCS中物点真实位置,为物点估计位置,即不确定区域中心点位置。

表1 两种方法计算操作数比较
3 摄像机参数对误差影响的性能分析
本文利用Matlab仿真研究该模型在双目摄像机系统下摄像机参数对测量误差的影响。摄像机的初始参数如表2所示,在研究单一参数对物点定位误差的影响时,其他参数设置为初始参数。在所有仿真中,通过求得不确定区域边界点,利用边界点构造不确定区域体积,以此来衡量物点定位误差。

表2 双目摄像机参数
图6中(a)到(f)分别是基线长度、焦距大小、像素尺寸、物点距离、不同深度下的基线长度以及不同物点位置对不确定区域体积的影响。由图6(a)可知,估计误差随基线长度增加而减小,这是由于物点处于某特定位置,当两摄像机间距离增加时,像平面上投影点距离其中心更远,像素圆锥变得更窄,导致两圆锥体相交区域变小,从而物点定位误差也减小;由图6(b)可知,估计误差随焦距长度增加而减小,这是由于每个像素圆锥会随摄像机焦距的增加变得更窄,进而产生更小的误差;由图6(c)可知,估计误差随像素尺寸增加而变大,因为从较小圆形像素中发出的圆锥比从较大像素发出的圆锥更窄,产生误差更小;由图6(d)可知,物点距摄像机距离越远,估计误差越大,因为目标越远离摄像机,其在摄像机平面上的投影就越接近图像平面中心,会产生较大圆锥,误差更大;由图6(e)可知,基线相同时不同深度下的误差是不同的,深度越大,误差越大;由图6(f)可知,平行于摄像机平面的所有物点的估计误差。通过上述仿真结果可知,被映射到离摄像机中心更远的物点具有更小的误差。
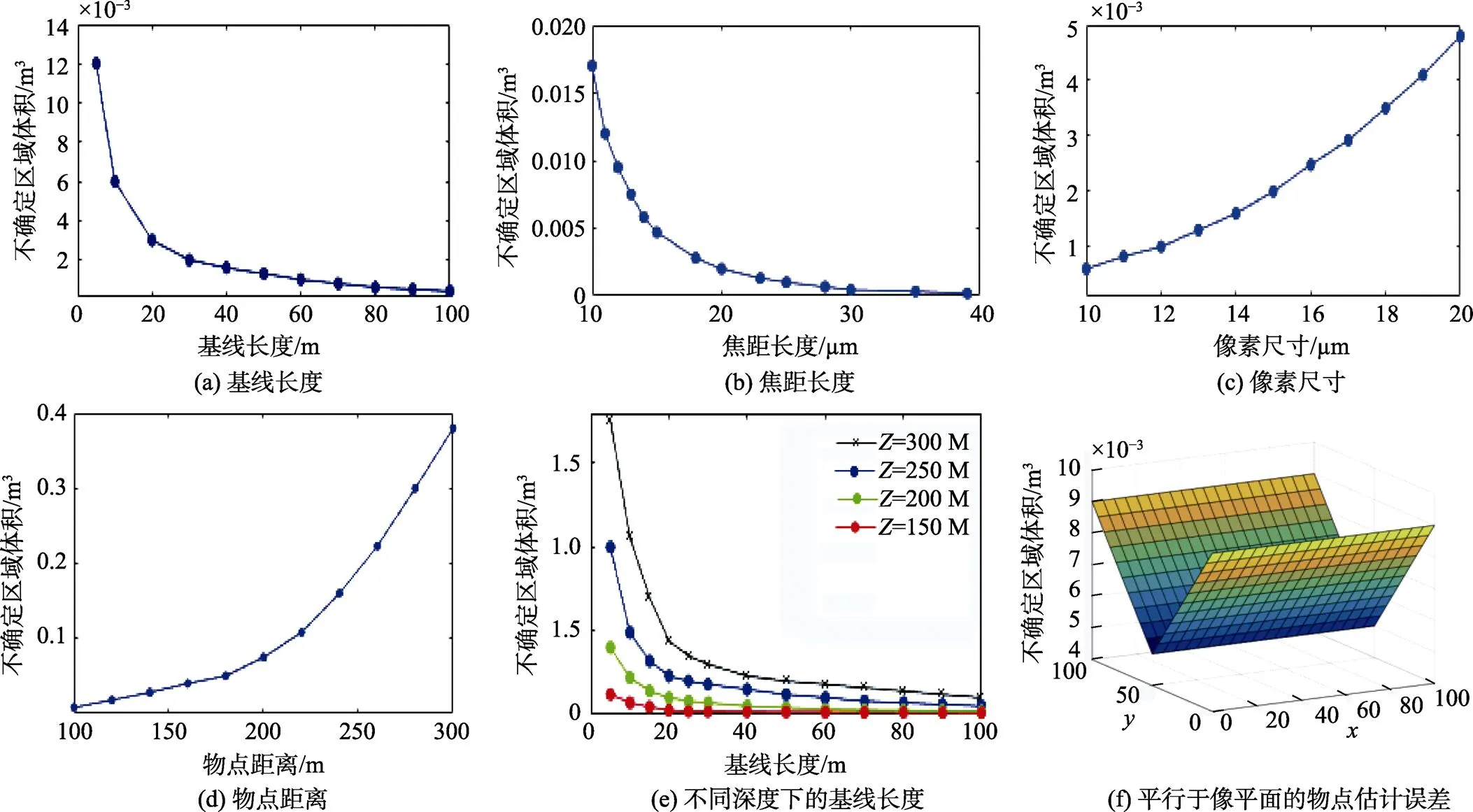
图6 双目摄像机参数对误差影响仿真图
4 结语
本文通过设计基于线-圆投影法简化的椎体相交几何误差模型,实现了不同摄像机参数下对视觉系统的误差分析,并经测试可知,被映射到离摄像机中心更远的物点具有更小的误差,可以较好地解决三维场景重建过程的物点定位误差问题,且具有模型简单、计算量小等优点。将该模型用于实验教学中,能够有效锻炼学生的逻辑分析能力和实践能力,对我校自动化学院的创新课程起到重要支撑作用。
[1] 揭昭斌. 基于序列图像的空间非合作目标三维重建方法与精度分析[D]. 哈尔滨:哈尔滨工业大学,2016.
[2] 汪神岳,刘强,王超然,等. 基于双目立体相机的室外场景三维重建系统设计[J]. 计算机测量与控制,2017, 25(11): 137–140, 145.
[3] 任甲,范宝德. 相关点搜索的等值面快速提取方法[J]. 烟台大学学报(自然科学与工程版),2016, 29(2): 110–115.
[4] 于潇宇,郭玉波,陈刚,等. 视觉测量中点目标的实时全局搜索[J]. 光学精密工程,2014, 22(10): 2796–2805.
[5] 高如新,王俊孟. 双目立体视觉求取三维坐标的方法研究[J]. 计算机仿真,2014, 31(10): 296–300.
[6] 丁莹,范静涛,宋天喻. 双目立体视觉检测系统正向最优化设计方法研究[J]. 仪器仪表学报,2016, 37(3): 650–657.
[7] 徐超,李乔. 基于计算机视觉的三维重建技术综述[J]. 数字技术与应用,2017, 28(1): 54–56.
[8] 张作昌. 基于多基线近景摄影测量技术的馆藏铜鼓三维重建[J]. 湘潭大学自然科学学报,2017, 39(1): 119–122.
[9] 王辉,任昕旸,于立君,等. 肢体语言检测与跟踪实验教学平台设计与开发[J]. 实验室科学,2017, 20(5): 81–84.
[10] 王辉,于立君,毛晓琦,等. 人脸活体特征检测实验平台设计与实现[J]. 实验技术与管理,2018, 35(5): 80–83.
[11] 郑冬梅,宋文爱. 相机标定关键设备对标定精度的影响分析[J]. 图学学报,2017, 38(2): 236–240.
[12] 谢晓伟,苗新刚,汪苏. 获取三维模型立体图像对KFR方法的研究[J]. 现代电子技术,2018, 41(14): 55–57, 61.
[13] 夏菠. 基于双目视觉的动态目标定位与抓取研究[D]. 绵阳:西南科技大学,2016.
[14] 魏少鹏. 基于深度相机与双目视觉复合的三维成像技术研究[D]. 杭州:浙江大学,2015.
Error model analysis and design of 3D reconstruction system in laboratory environment
YU Lijun, WANG Hui, ZONG Mingyang, ZHAO Yuxin
(College of Automation, Harbin Engineering University, Harbin 150001, China)
In view of the problem of error perturbation in the process of 3D scene reconstruction in experimental teaching, a geometric error model of cone intersection is proposed based on the study of the influence of different parameters on the error. The model is simplified by line-circle projection method, and based on this, the object positioning error caused by quantization error in multi-camera stereo vision system is estimated. The simulation experiments show that the method has the advantages of simple model and less computation and is suitable for 3D reconstruction of scene in multi-camera vision system. This simulation experiment of this model is completed by students in the laboratory. The aim is to cultivate students’ innovative thinking and practical ability.
positioning error; vertebral body intersection geometric error model; line-circular projection method; multi-camera vision
G642.423
A
1002-4956(2019)09-0151-04
2019-01-21
黑龙江省教改项目(SJGY20170505,SJGY20170506,SJGY20180089)
于立君(1975—),男,黑龙江安达,博士,副教授,自动化学院副院长,硕士生导师,主要研究方向为船舶控制、智能控制、教学研究。
E-mail:yulijun@hrbeu.edu.cn
王辉(1976—),女,黑龙江肇东,博士,副教授,控制工程(电气工程)实验教学中心副主任,硕士生导师,主要研究方向为模式识别与智能系统、教学研究。
E-mail:wangh@hrbeu.edu.cn
10.16791/j.cnki.sjg.2019.09.038
