基于RobotStudio的工业机器人自动化生产线仿真的研究*
2019-09-26蒋庆磊聂永涛郇新
蒋庆磊,聂永涛,郇新
基于RobotStudio的工业机器人自动化生产线仿真的研究*
蒋庆磊,聂永涛,郇新
(潍坊工程职业学院山工机电工程学院,山东 青州 262500)
文章阐述了基于RobotStudio软件运用Smart组件实现工业机器人自动化生产线仿真研究,主要用Smart组件创建动态输送链、动态夹具,设定工作站逻辑等项目。关键技术是Smart组件的应用。在RobotStudio中创建码垛工作站进行仿真,利用Smart组件实现动画效果。案例应用调试结果说明,基于RobotStudio仿真工业机器人自动化生产线可以获取高效、直观的结果。
RobotStudio;工业机器人;自动化生产线;仿真
引言
RobotStudio是为ABB工业机器人配套开发的软件,并应用于工业现场工业机器人软件调试编程,所以,基于RobotStudio软件能够十分形象的模拟工业机器人自动化生产工作过程,设计的工业机器人程序代码和运行文件,都可以移植到工业现场。根据可查询到的文献资料,都有RobotStudio软件设计虚拟工业机器人自动化生产线的方案,而基于RobotStudio软件具体进行工业机器人自动线仿真的技术要求不是很清晰。在工业现场生产线中,工业机器人的生产作业周期和任务要求等指标,是设计自动化生产线仿真环节必须考虑到的。
本文以ABB工业机器人的IRB460_110_240_01型号为例,介绍利用RobotStudio软件的Smart组件操作和指令进行工业机器人自动化生产线仿真优化。仿真结果说明,基于RobotStudio的工业机器人自动化生产线仿真,提高了编程设计效率,可以满足自动线重组设计要求。
1 RobotStudio软件简述
RobotStudio软件是重要的工业机器人离线编程软件,与ABB品牌工业机器人配套使用。基于该软件,能够搭建工业机器人及其工业现场环境的模型,借助各种编程方式实现对机器人的工作路径控制及操作,优化现有的机器人程序,即在离线环境下完成轨迹设计。利用编程手段能够十分形象的模拟生产线工作过程,实现三维多角度仿真,十分方便的检查程序正误,确认机器人能否达到目标位置,把生成的控制代码上传到工业机器人控制柜,进而控制工业机器人进给,实现目标任务。设计人员借助RobotStudio软件,减少了工业现场操作人员设计编程工作量,提高了项目运作效率,计算工作周期,节约了生产成本,实现了安全生产。
RobotStudio软件具有以下优势:导入CAD模型、生成自动路径、程序编辑器、优化路径、自动分析伸展能力、防碰撞检测、在线仿真作业。RobotStudio软件的用户界面包含功能选项卡、布局浏览器、路径和目标点浏览器等,其中功能选项卡用的最频繁,包含文件选项卡、基本选项卡、建模选项卡、仿真选项卡等。利用Smart组件强大功能,动态仿真工业机器人自动化生产线运行过程。
2 工业机器人自动化生产线仿真
在自动化生产线中,工业机器人已成为智能制造产业中十分重要的生产工艺,而工业机器人技术的核心之一是工业机器人自动化生产线重组,可以进一步提升工业机器人应用水平、生产能力。目前国内为适应“中国制造2025”、新旧动能转换重大工程发展需求,对智能制造人才的要求越来越高,那么工业机器人自动化生产线可以降低生产成本、提高工作效率、提升质量水平,受到了社会广泛关注。因此,对工业机器人自动化生产线仿真展开研究具有十分重要的意义。
工业产品自动化的市场竞争越来越激烈,用户对生产效率的要求越来越高,追求低成本高品质。当前在新产品生产之前,需要对生产线进行编程与调试花费时间太长不可取,所以采用工业机器人自动化生产线仿真,提高生产效率,仅需要对修改部分进行设计编程。RobotStudio软件是基于ABB工业机器人VirtualController开发的,开发者能够在电脑中很容易地模拟工业现场自动线工作过程,让用户充分了解设计和管理生产全过程的状况。借助RobotStudio软件能够提升工业机器人生产线设计编程的正确性和效率,节约停机检修时间,满足工业机器人不同生产任务需求,具有一定的故障排查、安全生产教育、风险管理等作用。
3 利用Smart组件实现码垛工作站仿真
3.1 用Smart组件创建动态输送链
在RobotStudio中创建码垛工作站仿真,输送链的效果对整个工作站起到一个关键的作用。在工业机器人自动化生产线中,输送链前端自动生成产品、产品随着输送链向前运动、产品到达输送链末端后停止前进、产品被移走后输送链前端再次生成产品,周而复始,循环运行。设定输送链的产品源属性设置效果如图1所示。设定输送链的运动属性设置效果如图2所示。设定输送链限位传感器属性设置效果如图3所示。创建属性与连结仿真效果如图4所示。创建信号与连接仿真效果如图5所示。码垛工作站的动态输送链仿真运行如图6所示。

图1 Source设置

图2 LinearMover设置

图3 PlaneSensor设置

图4 属性与连结设定效果

图5 信号和连接设定效果

图6 动态输送链仿真运行效果
3.2 用Smart组件创建动态夹具
在RobotStudio中创建码垛工作站仿真,夹具的动态效果也是十分重要的。在输送链末端拾取产品、在放置位置释放产品、自动置位复位真空反馈信号,即实现夹具的动态效果。本案例中借助海绵式真空吸盘进行产品的拾取和释放,利用Smart组件创建夹具。夹具属性设定效果如图7所示。检测传感器设定效果如图8所示。拾取放置动作设定效果如图9(a)、(b)所示。属性与连结创建效果如图10所示。信号与连接创建效果如图11所示。夹具动态模拟运行效果如图12(a)、(b)所示。

图7 tGripper设定

图8 LineSensor设置

图9 (a)Attacher设置

图9 (b)Detacher设置
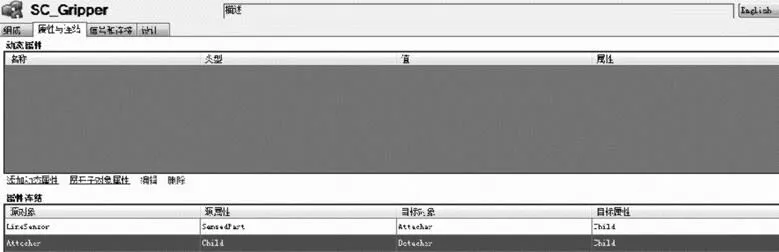
图10 属性与连结设定效果
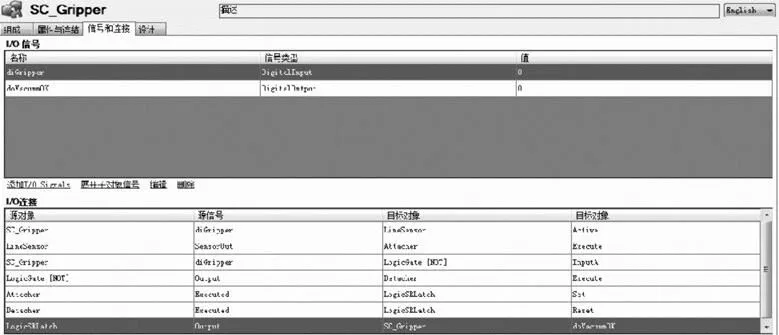
图11 信号和连接设定效果

图12 (a)夹具动态模拟产品拾取效果

图12 (b)夹具动态模拟产品释放效果
3.3 码垛工作站仿真
按照上述步骤,设定好机器人程序以及I/O信号,再进行Smart组件与机器人端的信号通信,即设定码垛工作站逻辑,将Smart组件的I/O信号与机器人端的I/0信号进行信号关联。MainMoudle程序模块内容如图13所示。Smart夹具的反馈信号与机器人端的反馈信号相关联,设定效果如图14所示。输送链前端产生复制产品,并沿着输送链运动;复制品到达输送链末端后,机器人接收到产品到位信号,则机器人将其拾起来并放置到托盘的指定位置;依次循环,直到码垛到10个产品后,机器人复位,即整体仿真效果,如图15(a)、(b)所示。

图13 MainMoudle程序模块内容

图14 工作站逻辑设定
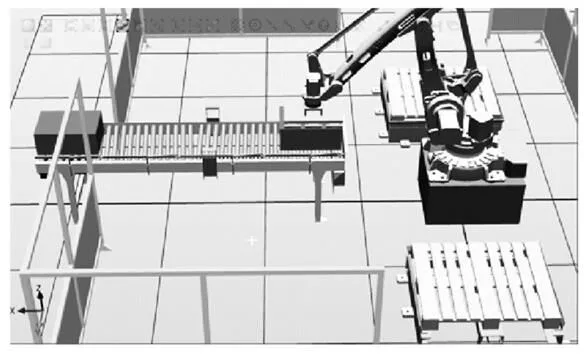
图15 (a)整体运行仿真开始效果
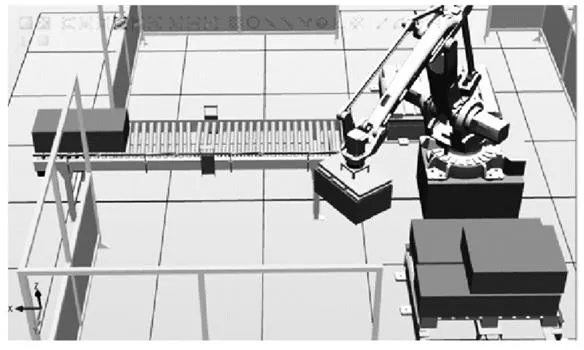
图15 (b)整体运行仿真效果
4 结论
通过生产线仿真运行,了解到RobotStudio在工业机器人生产线仿真的应用,以及督促现实生产实际技术革新与改造。设计的仿真程序能够下载到工业机器人上运行,与传统的编程方法相比较,发展了生产力,提升了工业机器人生产线设计的准确性和稳定性。
[1] 衡伟.基于RobotStudio的螺旋桨转轴自动焊接设计[J].山东工业技术,2019(4):6-11.
[2] 程福.应用RobotStudio软件分析工业机器人的作业性能[J].机械工程与自动化,2019(2):26-27.
Research on the Simulation of Industrial Robot Automatic Production Line Based on RobotStudio*
Jiang Qinglei, Nie Yongtao, Huan Xin
( SEM School of Electromechanical Engineering, Weifang Engineering Vocational College, Shandong Qingzhou 262500 )
This paper describes research on the simulation of industrial robot automatic production line using Smart components based on RobotStudio software, mainly creating dynamic transport chain, dynamic fixture and setting the logic of workstation with Smart components. The key technology is the application of Smart components. Creating stacking workstation for simulation in RobotStudio, and using Smart component to achieve animation effect. The debugging results of the case application show that the simulation of industrial robot automatic production line can get efficient and intuitive results based on RobotStudio.
RobotStudio; Industrial robot; Automatic production line; The simulation
TP242.2
A
1671-7988(2019)18-177-04
TP242.2
A
1671-7988(2019)18-177-04
蒋庆磊(1986-),男,山工机电工程学院团总支书记、讲师,就职于潍坊工程职业学院,从事机电一体化技术、工业机器人技术、精密检测与质量控制技术研究工作。
本论文是2018年度山东省高等学校科研计划项目(一般项目)A类项目的阶段性研究成果,项目编号:J18KA060。
10.16638/j.cnki.1671-7988.2019.18.059
