移动取物机器人
2019-09-23王博
王博


【摘 要】随着机器人技术的发展,机器人技术已经在社会、国防和工业中有着举足轻重的地位。移动取物机器人技术属于多学科相互交叉,是机电一体化的典型代表,同时也是我高科技水平和发展实力的重要标志。本文介绍了移动取物机器人的研究背景,对国内外移动取物机器人的相关现状进行了调查,分析了其组成机构及运行原理,在此基础上设计了一款新的移动取物机器人。
【关键词】移动取物机器人;机械手;履带车;结构设计
移动取物机器人技术属于当今世界先进技术,其包含了多个学科;移动机器人的设计与制造涉及了机械工程、材料工程、电子工程、计算机工程、生物工程、传感器与控制工程等诸多科学,是机电一体化的典型代表[1]。
就我国而言,人口老龄化问题已经相当严峻。根据相关调查,2010年65岁以上老龄人口总数已经达到1.11亿,预计2050年将达到3亿左右,与此同时,世界老龄人口也呈现出增长趋势。因此服务型的机器人是一大热门。
移动机器人在航天领域、快递分类、国防建设等方面表现不凡,特别是在工作环境恶劣,对人体有极大伤害的场所如:核辐射区域、外太空等,只能依靠移动机器人进行相关调查和侦察。美国在对伊拉克的战争中,使用了很多现代机器人,包括排爆机器人、侦察机器人、防卫机器人等,总数目已经达到两万多套,(无人机七万多套,地面机器人近两万套)[2]。发达国家已经广泛应用了为应对各种场合而研发的特定功能机器人,但是我国尚处于研究初期。
综上所述,人们已经清楚意识到地面移动取物机器人的优越性,相应的,移动机器人的相关性能随之提高:运行更稳,动作更精确,冲击小。所以,具有智能性作业的自主移动机器人会在未来人们生产生活中,包括消防、航天、军工中应用越来越广,已经成为二十一世纪发展的重要方向之一。
一、移动取物机器人机构原理
如图所示,移动取物机器人主要由智能移动平台和搬运机械臂两大部分组成。用来实现物品的定点运输。总共有6个自由度。
移动机器人系统主要包括总控制系统,机械臂取物系统和移动平台系统组成。
总控制系统是控制移动取物机器人的中枢,检测机器人各处的工作情况,处理来自其他两个系统的信息,发送控制信息,来保证整个移动取物机器人正常工作。移动平台系统的功能是实时收集移动机器人的周围环境信息,保证机器准确、高速、安全的到达目的地。机械臂取物系统则是控制机械臂调整机械臂及机械手的姿态,配合移动平台的位置来准确夹取和释放物品。
移动取物机器人整体结构:机械臂和履带车。机械臂由底座,大臂,小臂和机械手构成,其中底座部分安装了三个步进电机,用于提供底座、大臂和小臂回转的动力。
(一)智能移动机构原理
常见的移动平台行走方式有:腿式机构、履带式机构、轮式机构和组合式等,其中应用最广泛得式履带式和轮式[3]。
机器人的智能移动平台采用选择履带式,其自由度是二,履带式移动平台结构上与行驶表面接触面积大,可以适应土质疏松的环境,工作环境适应性高。履带式通常采用差速驱动,能够实现原地转向。
履带车大体上由底盘、侧壁、固定轮和传动链轮链条组成[4],其中链条和底盘是负载最大部分,它的稳定性可以說是整个移动取物机器人开始的关键一步。履带车底盘上面便是整个机械臂部分,由于本次设计夹取的物品质量并不大,因此一般电机就可。整个运动过程可描述如下,电机通过联轴器将动力输送给链条驱动轮,链轮带动链条前进,通过两侧电机速度的调节,可以使小车完成转弯,回转,停车等正常功能。其整体结构图2所示:它包含以下方面和功能:
1.履带车侧壁:是联系履带车底盘与系杆的关键结构,均使螺栓连接;上面配有系杆回程槽口,当履带车需要翻越障碍时,固定轮将会带着系杆在槽内回转,使得整个小车高度降低,提高爬坡力。
2.电机:两个电机即提供了履带车两个自由度。
3.复位弹簧:降低履带车运动时候的震荡程度,在履带车完成爬坡后,将系杆恢复原位,使之能进行下一次攀越。一端固定在侧壁卡扣上,另一端固定在系杆卡扣上。
4.系杆回程卡槽:一个圆弧状的槽,系杆的定位柱可以里面定位,并设计由22°的活动范围,使小车攀越能力提高。
5.传动链条:是小车行驶的关键结构,用链条代替轮子,使得整个小车牵引力增大,重心低,附着系数大,具有良好的抵抗倾翻性和坡地稳定性。
6.驱动链轮:需要有一定的弯曲强度,使得电机可以驱动链轮带动链条实现小车行驶。设计为双排链轮链条结构,这使得链轮稳定力学性能提高,平稳性高。
7.固定轮:平衡整个履带车,定位履带,使之能够稳定运转。
8.系杆:通过螺栓固定在侧壁上,配有定位卡柱和弹簧卡扣,需要一定的强度,来承担运动载荷。
(二)机械臂机构原理
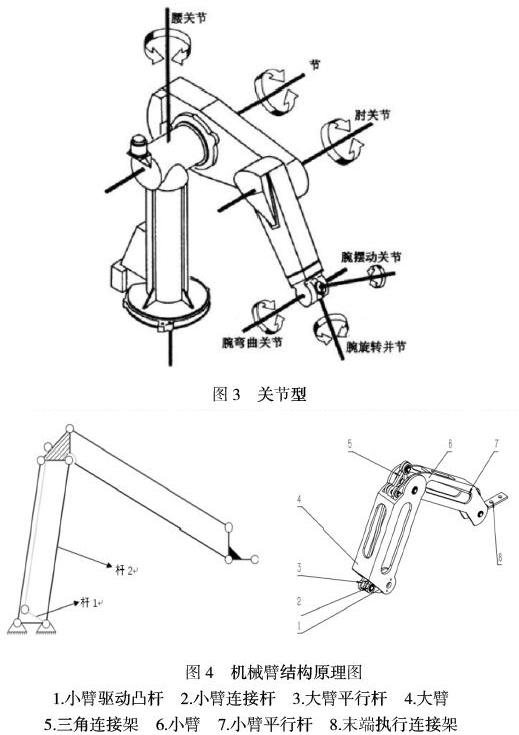
从理论上将,机械臂的空间连杆结构形式决定了其可以运动的最大范围,关节型机器人最为常见,使用很广。关节型机机械臂优点是结构紧凑,整体所占体积小,相对来说,工作空间最大,动作灵活,活动惯性小,动作更具有连续性和重复性,还可以穿过障碍物。结构如图3所示。
根据移动取物机械手的设计要求,本设计要求机械手质量轻、体积小,可折叠,对动作半径和灵活度要求较高,结合设计指标,分析国内外移动取物机器人机械臂后,决定采用关节型机器人,初步设计机械臂构件为:底座、大臂、小臂、执行端夹持器,需要实现底座回转,大臂回转,小臂回转,夹持器夹取四个动作,所以其自由度为4。
这里机械臂选用分离型机械臂设计。它不是直接由驱动元件驱动,而是驱动元件通过一定的传动方式将动力一步一步传给运动件;这种设计方法可以让机械手臂工作过程中能源利用率高,重量集中在底座,使机械臂运行更稳,但缺点结构设计复杂,需要设计多个零件,且维护不便。由于移动取物机器人机械臂自由度等于4并不多,所以分离式关节机械手臂也并不复杂,负责旋转的电机安装在底座上,大大降低了机械臂的设计复杂程度。
机械臂如图4为其机构原理图,由底座、大臂、小臂、执行端组成,共四个自由度,动力源采用3个步进电机和一个舵机。采用的传动方案最终定为复合平行四边形杆组结构,左边电机通过一个平行四边形杆组驱动小臂运转,右边电机通过复合平行四边形杆组驱动大臂转动;在使得平行件的运动角速度完全一致,又保证了执行端一直与地面平行,使机械臂在夹取物品过程中十分稳定,使物体保持与履带车底板平行。
在选择机械臂的制造材料时主要综合考虑材料的强度、刚度、可加工性及价格等。本机器人主体采用6063铝合金,6063铝合金适用范围广,生活中很常见,其装配性能、耐蚀性能良好,经济实用。履带车由于承载力较大,7050铝合金具有很高的强度和韧性,因此选用7050铝合金。
二、机器人工作范围
本次设计的是移动取物机器人,机械臂在底板上放置如图5所示,在x方向整体的约三分之一处,并不在中心位置,因为整个机械臂实际工作时得质量不集中在中心,这样做可以使机器人在取物过程中很平稳,有个平衡力矩平衡取到的物体,不会发生倾覆。
图5为机械臂大小臂运动范围。大臂长155mm,运动角度范围为90度,小臂长190mm,运动那个范围为120°;由图可知在机器人固定时,机械臂可以拿取从地面到离地面50cm高(底座离地面16cm),方圆25cm左右的物品。理论上,移动机器人在移动时,可以拿取高度在50cm以下、体积质量合适的任何物品。图6为设计出的移动取物机器人总装图:
四、结束语
本文介绍了一种新型机器人——移动取物机器人,设计了它的机械臂和履带车两部分,并对机器人的作业空间进行仿真分析。该机器人在构型、结构设计方法、驱动方式以及总自由度等方面都具有创新性。对移动取物机械的原理分析到机械臂构型及其驱动方式选择,再到具体传动方案的设定、材料的选择,然后进行了零部件设计,驱动部件选型及其强度校核,用Solidworks中Simulation插件对重要零件进行了仿真模拟。该助餐机器人具有结构巧妙、易于加工制造、操作简单的特点,而且与同类产品相比成本低,易于产品化。
【参考文献】
[1]郑文钢.基于RGB-D的移动搬运机器人的物体位置检测与姿态估计[D].浙江大学,2019.
[2]秋娟.我国人口老龄化对经济增长的影响研究[D].寧波大学,2017.
[3]王超星.全地形移动机器人机械结构及控制系统设计[D].北京化工大学,2017.
[4]冯琛.木门智能喷涂生产关键装置的设计与应用[D].浙江农林大学,2018.
