一类具比例时滞递归神经网络的全局稳定性及仿真
2019-09-17周立群
邢 琳,周立群
(天津师范大学数学科学学院,天津300387)
递归神经网络(RNNs),包括Hopfield 神经网络、Cohen-Grossberg 神经网络和细胞神经网络等,其在信号处理、联想记忆、优化与控制和人工智能等方面有着重要的应用.这些应用大多要求平衡点的稳定性,由于系统在运行过程中时滞普遍存在,因此研究具时滞的递归神经网络的稳定性更有实际意义.
比例时滞作为一种无界时变时滞,在物理、生物、电子与计算科学等领域发挥着重要的应用.目前对比例时滞递归神经网络的稳定性的研究已取得了一些成果[1-16].文献[1-4]分别利用M-矩阵理论、时滞微分不等式、Young 不等式以及Lyapunov 稳定性理论,得到了比例时滞递归神经网络全局指数稳定的充分条件.文献[5]应用定点理论和不等式分析技巧,研究了比例时滞竞争神经网络的指数稳定性.文献[6-7]应用Lyapunov 稳定性理论与相关不等式技巧,分别研究比例时滞脉冲二阶Hopfield 神经网络的全局指数稳定性以及比例时滞递归神经网络的指数同步性.文献[8]利用微分不等式技巧得到了一类多比例时滞递归神经网络正平衡点的唯一性和广义指数稳定性.文献[9-10]应用矩阵理论和Lyapunov 函数,证明了两类多比例时滞细胞神经网络的指数稳定性和渐近稳定性.文献[11]利用非线性测度研究了多比例延时细胞神经网络的指数稳定性.文献[12]利用内积性质和矩阵理论,得到了一类比例时滞细胞神经网络的耗散性.文献[13-16]分别采用微分不等式技巧和微分包含理论研究了比例时滞非自治细胞神经网络的全局指数收敛性和有限时间稳定性、比例时滞模糊细胞神经网络的有限时间同步性以及记忆神经网络的反同步控制性.本文对于一类比例时滞递归神经网络,运用对角(半)稳定矩阵,并建立合适的Lyapunov 泛函,以及构造时滞微分不等式,得到保证系统全局渐近稳定和全局指数稳定的充分条件,该条件与时滞无关,且与以往结果相比保守性较低.
1 模型与预备知识
考虑如下模型
其中:C=diag(c1,c2,…,cn),ci>0;W=(wij)n×n为神经网络的权重矩阵;u(t)=(u1(t),u2(t),…,un(t))T为神经元在时刻t 的状态向量;g(·)为激活函数,g(u(t))=(g1(u1(t)),g2(u2(t)),…,gn(un(t)))T;I=(I1,I2,…,In)T为偏置性输入;a、b∈R,a >0,b >0;qt=t-(1-q)t,满足0 <q≤1,(1-q)t 为时滞函数,且当t→+∞时,(1 - q)t→+∞(q≠1); φ(θ)=(φ1(θ),φ2(θ),…,φn(θ))T∈C([q,1],Rn)为系统的初始函数,C([q,1],Rn)表示从[q,1]到Rn的所有连续函数构成的集合.
做变换

由系统(1)知et≥1,因此t≥0,且有由系统(1)和式(2)可得

于是系统(1)可等价变换为
其中: τ=-ln q≥0; y(t)=(y(1t),y(2t),…,y(nt))T,ψ(θ)=(ψ(1θ),ψ(2θ),…,ψ(nθ))T∈C([-τ,0],Rn).
假设g(·)满足如下条件:(H)激活函数gi满足连续的局部Lipschitz 条件,且为一致不减的函数,即对于任意常数xi0∈R,∃εi0>0,li0>0,i=1,2,…,n,使得

其中:σ、ρ∈[xi0-εi0,xi0+εi0],σ≠ρ.
设系统(1)的平衡点为u*, 系统(3)的平衡点为y*,由假设(H)知系统(1)和系统(3)的平衡点均存在,且易证u*=y*.令z(t)=y(t)-y*,则系统(3)可变换为
其中:f(z(t))=(f1(z1(t)),f2(z2(t)),…,fn(zn(t)))T=g(z(t)+y*)- g(y*),f(0)=0; ξ(θ)=ψ(θ) - y*.f 也满足条件(H),因此,系统(4)零解的稳定性与相应的系统(3)的平衡点的稳定性等价.
定义1称n×n 矩阵A 为对角半稳定的(或对角稳定的),如果存在正对角矩阵K,使得KA+ATK≤0(或KA+ATK <0).
定义2称系统(4)的平衡点z*=0 是全局渐近稳定的,如果对于任何初始值都有
定义3称系统(4)的平衡点z*=0 是全局指数稳定的,如果存在M≥1,β >0,使得

定义4设存在ai>0,使得|zi(t)|≤ai,∀t≥0,i=1,2,…,n.记

若在GH内存在正定函数V(z(t),t),使得则系统(4)的零解是稳定的.
命题1[17]存在正函数li(zit),i=1,2,…,n,满足
命题2[17]存在正连续变量li0满足

∀sit=即sit是介于0 与zit之间的函数,D+fi(sit)为fi(sit)的Dini 导数.
命题3[17]存在正连续变量li0,i=1,2,…,n,满足

2 主要结果
定理1若系统(1)中矩阵W 是对角稳定的,且满足条件(H),则系统(1)的平衡点是全局渐近稳定的.
证明因为W 是对角稳定的,因此存在正对角矩阵K=diag(k1,k2,…,kn),使得KW+WTK <0.考虑如下Lyapunov 泛函

由命题1 知V(t)≥0,即V(t)是正定的.易知afi(zi(t))+bfi(zi(t-τ))满足条件(H).对V(t)沿系统(4)对t≥0求导,得
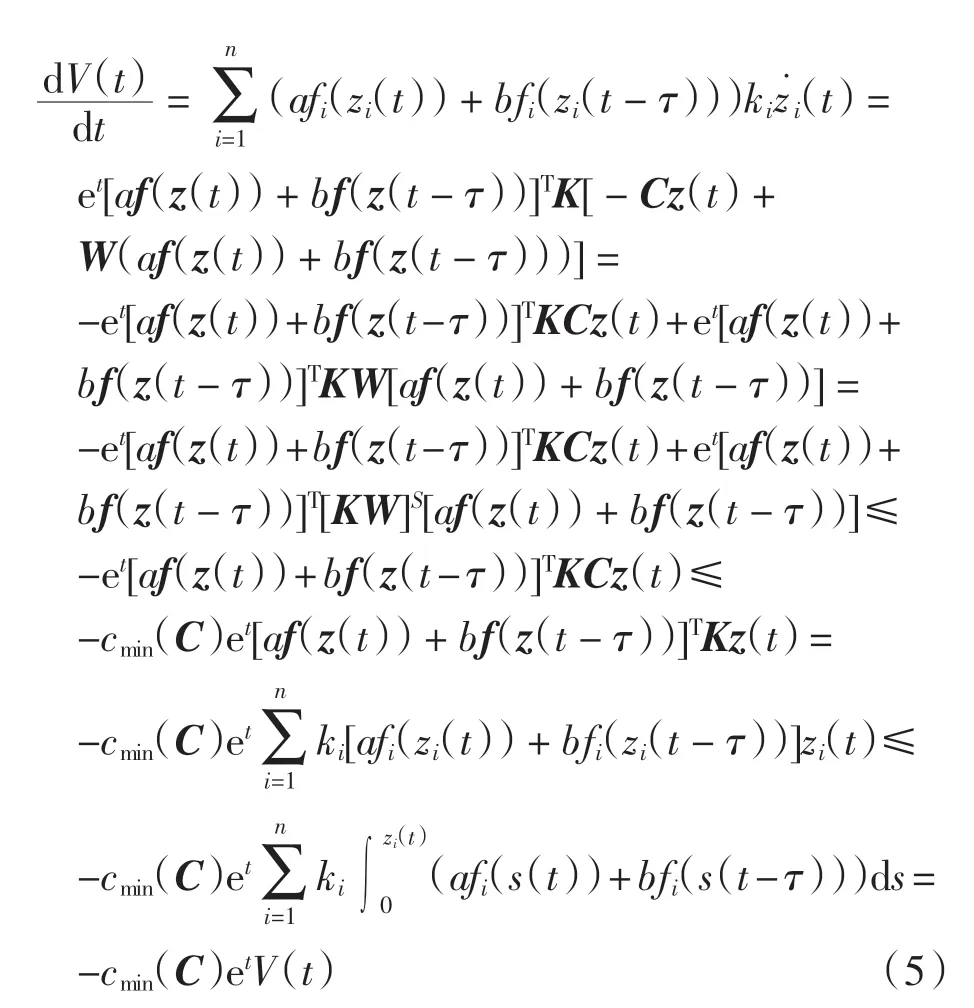
其中cmin(C)表示矩阵C 的最小的特征值.
设z(t)≠0,则存在某个i,使得zi(t)≠0,由V(t)的定义知V(t)>0,再由式(5)得
考虑z(t)=0,若z(t -τ)=0,由式(5)得
利用一塔两线模型分析得到的系统振动特性,与三塔两线等其他更为复杂的模型得到的结论基本一致[13].因此,可以将多跨连续的塔-线体系结构简化为一基塔与两跨线组成的简化系统,如图1所示.将塔-线体系中的输电塔、导线分别视为悬臂梁和弦线,得到的一塔两线连续体简化力学模型[14].
设z(t)=0,z(t-τ)=0,此时显然有
定理2若系统(1)中矩阵W 是对角稳定的,且满足条件(H),并且存在常数α >0,使得
则系统(1)是全局指数稳定的.
证明仍考虑定理1 中的Lyapunov 泛函,由定理1 知系统(4)的零解z(t)=0 是全局渐近稳定的.由定义2 知,存在ai>0,使得|zi(t)|≤ai,∀t≥0,i=1,2,…,n.
由命题3 得
其中z0=(z10,z20,…,zn0)T.定义如下连续函数
对Ei(v)取Dini 导数,得
由命题2 可知

于是有

从而

由命题3 得
所以
于是∀zit∈[-ai,ai],Ei(v)≥Ei(0)=0,即有
于是有
定义

由式(4)及式(7)可得

因此
由此不难得到

断言xi(t)≤T,i=1,2,…,n,t∈(0,+∞).先证对d >1,有

若式(10)不成立,则由式(9)可知存在t1>0 和某个i(不妨设为k),使得

其中:-τ≤t <t1,i=1,2,…,n.
另一方面,由式(6)和式(8)有
因此得到矛盾.于是有

当d→1 时,有

于是可得


其中α >0,λ≥1,i=1,2,…,n.由定义3,系统(4)的零点是全局指数稳定的,从而系统(1)的平衡点也是全局指数稳定的.
定理3若系统(1)中矩阵W 是对角半稳定的,且满足条件(H),则系统(1)的平衡点是稳定的.
证明对于定理1 中的Lyapunov 泛函,当z(t)=0,z(t-τ)≠0 时,由式(5)有

其余过程同定理1.由定义4 知系统(4)的零解是稳定的,则系统(1)的平衡点是稳定的.
3 数值算例及仿真
例考虑如下二维模型
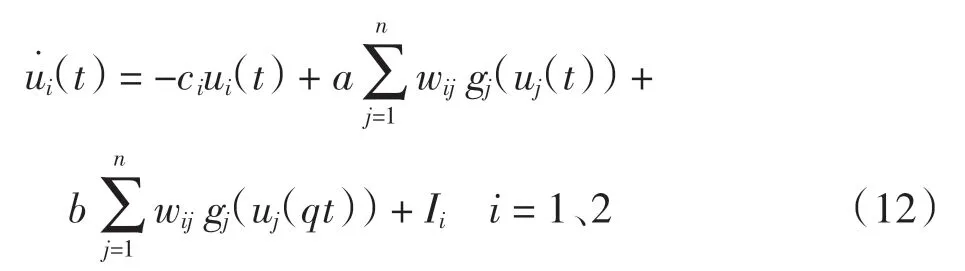
其中
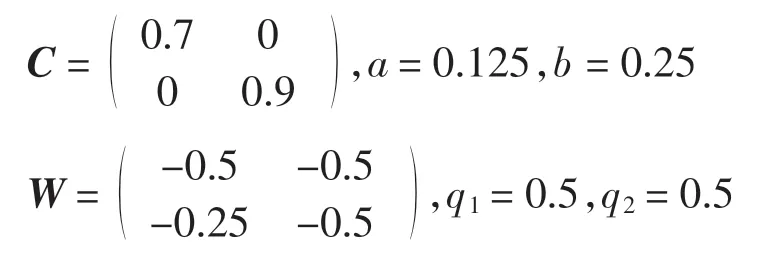
故有
取α=0.001,计算得

故满足定理2 的条件,则系统(12)的平衡点是全局指数稳定的.
当系统(12)外部输入I=(0,0)T时,系统平衡点是(0,0)T.系统(12)的全局指数稳定性见相轨迹图1和时间响应曲线图2.
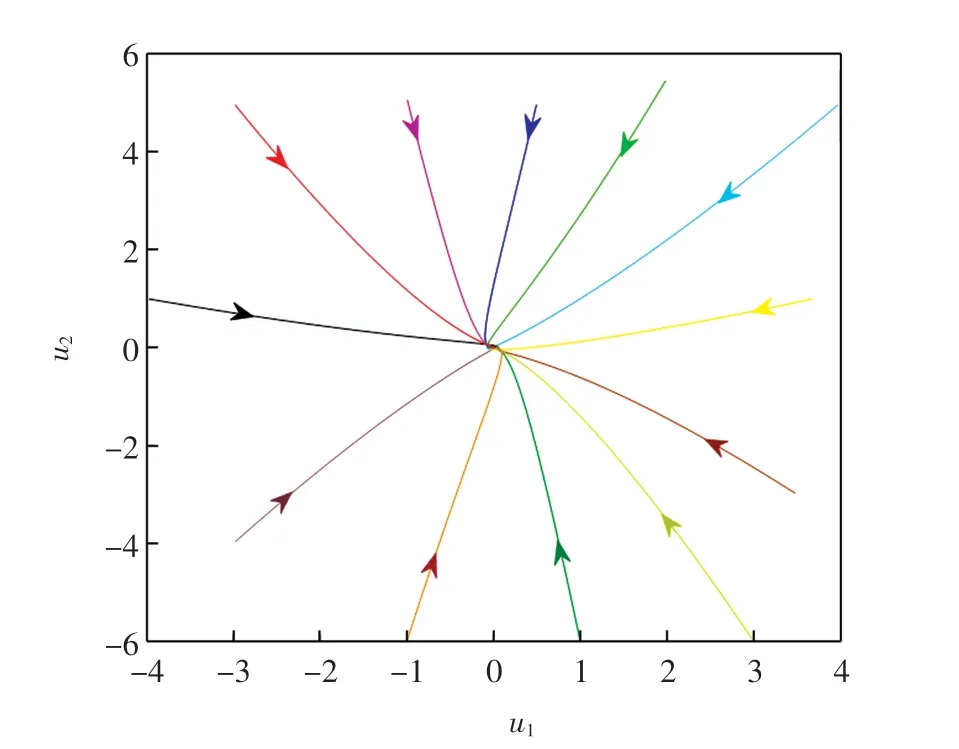
图1 当I=(0,0)T 时,系统(12)的相轨迹Fig.1 Phase trajectory of System(12)when I=(0,0)T
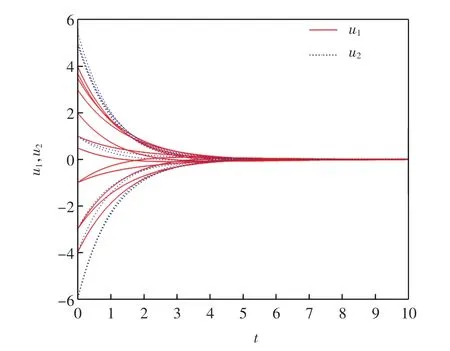
图2 当I=(0,0)T 时,系统(12)的时间响应曲线Fig.2 Time response trajectory of System(12)when I=(0,0)T
当系统(12)外部输入I=(1,-1)T时,应用Matlab计算得系统平衡点为(1.329 6,-1.097 5)T.系统(12)平衡点的全局指数稳定性见相轨迹图3 和时间响应曲线图4.
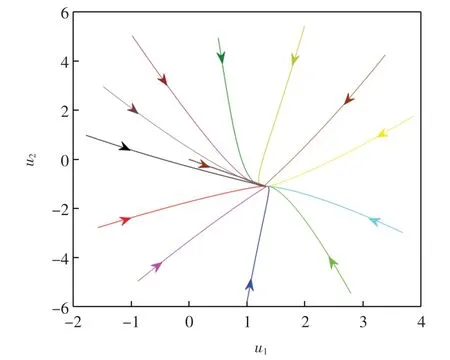
图3 当I=(1,-1)T 时,系统(12)的相轨迹Fig.3 Phase trajectory of System(12)when I=(1,-1)T
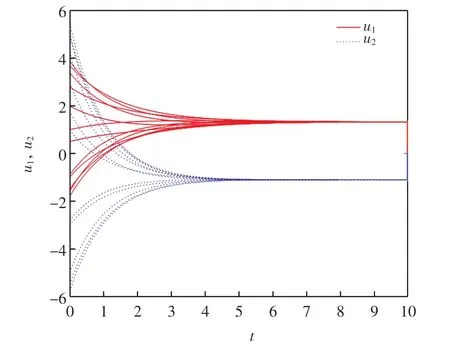
图4 当I=(1,-1)T 时,系统(12)的时间响应曲线Fig.4 Time response trajectory of System(12)when I=(1,-1)T
