分布式驱动电动汽车转矩协调控制策略研究
2019-09-11王子铭刘勇鲍俊屹
王子铭,刘勇,鲍俊屹
(南京航空航天大学自动化学院,江苏 南京 211106)
引言
随着世界汽车工业的不断发展,新能源汽车在汽车市场上的地位日益上升,其逐渐成为实现交通可持续发展的一种可靠选择[1]。研究电动汽车在转向时的转矩分配策略,将极大地提高电动汽车在低速行驶时的操纵性,以及高速行驶时的稳定性,具有重要意义。
1 轮毂电机控制目标分析
由阿克曼模型可知:车辆转向时,各车轮的速度是相互关联的,在转向角和车身结构确定的情况下,改变一个车轮的速度即会影响其他车轮的速度,各车轮之间存在较强的耦合性,不利于发挥分布式驱动电动汽车各车轮可独立控制的优势,因此不选用电机的转速控制。
而转矩控制则直接控制摩擦力,在不违背电子差速原理的前提下,控制轮胎的滑移率,改善行驶状态,因此本文选择电机转矩作为轮毂电机的主要控制目标。
2 转矩协调控制策略分析
2.1 转矩协调控制总策略
本文的控制策略应能实现以下两个目标:
(1)直线正常行驶,转矩平均分配,可以获得较好的动力性能。
(2)汽车转向时,依据车身稳定性分析对四轮毂电机转矩协调控制,增加行驶稳定性。
依据上述目标获得转矩协调控制总策略图1。其中δ为车辆转向角,θac 为油门踏板开度,γ为车身横摆角速度,β为车身质心侧偏角,γex为理想横摆角速度,T1、T2、T3、T4 分别为四个轮毂电机的转矩值。
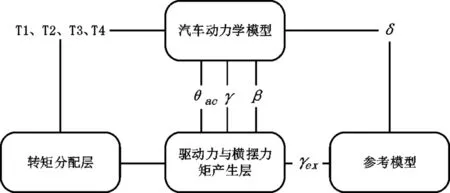
图1 转矩协调控制总策略图
在具体的模块选择上,动力学模型选择CarSim 进行建模,参考模型选择二自由度模型,驱动力与横摆力矩产生层选择模糊控制器进行控制,转矩分配层依据转角进行合理分配,具体内容在后续几小节给出。
2.2 车辆二自由度模型
选择横摆角速度的理想值与实际值的误差Δγ与质心侧偏角理想值与实际值的误差Δβ作为控制输入变量,可以确定目标横摆力矩的大小。二自由度的车辆模型如图2 所示:
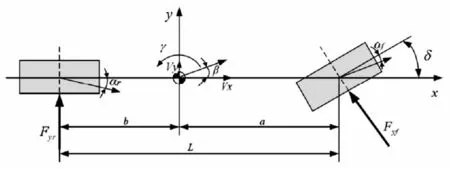
图2 二自由度车辆模型
根据以上分析,可以得到汽车二自由度模型的动力学方程:

式(1)和式(2)中,Fy 表示侧向力的合力,Mz 表示绕z 轴的合外力矩。此时,考虑车辆轮胎的侧向力的情况,即考虑轮胎的侧偏刚度和轮胎的侧偏角的大小,可得:
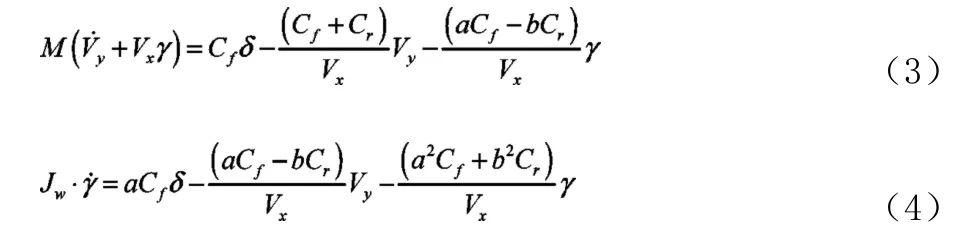
式中Cf和Cr分别表示车辆前后轮的侧偏刚度(N/rad),a、b 分别表示前、后轴中点到质心的距离(m),其他物理量与前文一致。
2.3 目标横摆力矩确定方法
由于车辆行驶情况较为复杂,且二自由度模型是简化了的线性模型,当轮胎的侧偏特性不满足线性时,会出现较大的误差,我们很难建立准确的数学模型对横摆力矩进行控制,因此在本文的控制器设计中,采用了基于模糊逻辑的控制方法[2][3]。
本文中的隶属度函数有三个,即Δγ、Δβ和的ΔM 隶属度函数,均选用了最常用的三角形隶属度函数trimf。
在定义三个变量的隶属度函数中,将横摆角速度的偏差值Δγ设置其论域为[-1,1],共定义了七档,每档跨度为0.67,模糊子集为{NB NM NS ZE PS PM PB};质心侧偏角的偏差值Δβ设置其论域为[-1,1],也同样定义了七档,每档跨度为0.67,模糊子集为{NB NM NS ZE PS PM PB};附加横摆力矩ΔM 是输出量,为其设置的论域是[-1,1],共定义了9 档,模糊子集为{NVB NB NM NS ZE PS PM PB PVB},每档中的三角形跨度为0.5。
2.4 转矩分配策略
车辆转向时,外侧前轮产生的力都增强车身横摆力矩,内侧后轮产生的力都减少横摆力矩,控制这两个轮的转矩大小可对车辆横摆力矩产生最有效的控制效果,即双轮控制模式。
在双轮模式下,当车辆转向不足时,外侧前轮增加ΔT的转矩,内侧后轮减小ΔT 的转矩;当转向过度时,外侧前轮减小ΔT 的转矩,内侧后轮增加ΔT 的转矩。二者在改变车身横摆力矩的同时,并没有减少车辆纵向的驱动力,为一种较为平滑缓和的控制方式。
在得到附加横摆力矩值后,根据车轮和车身尺寸,即可得到相应轮胎附加转矩值。

3 CarSim&MATLAB 联合仿真结果
3.1 动力学建模
本文车辆的动力学模型由CarSim 软件进行仿真搭建。设置整车参数如下:整车长×宽×高为4250×1880×1480(mm),车身质量为1250kg,轴距为3050mm,轮距为1600mm,轮胎半径为364mm,轮胎质量为80kg,迎风面积为2.8m2,绕Z 轴的转动惯量为3234kg·m2。仿真模型通过输入接口,将外部转矩直接加在非簧载质量上。
3.2 双移线仿真结果
在加入转矩协调控制前后车辆实际的横摆角速度结果:车辆的理想横摆角速度幅值为-32.2~23deg/s,在无转矩协调控制时,车辆的横摆角速度幅值为-11.43~8.14deg/s;而在施加控制后,横摆角速度幅值变为-16.89~15.31 deg/s,提高了22.9%。因此,双轮模式在施加横摆力矩控制后,使得车辆的横摆角速度更接近理想值,减小了车身的侧倾幅度,有效地提高了车辆的稳定性。
此外,无转矩协调控制时,车辆在双移线仿真的第二个转向与预定轨迹的交点为170.02m 处,在246.23m 处才返回预定轨迹;而在施加控制后,车辆与预定轨迹的交点变为157.85m 处,在208.59m 处即返回预定轨迹。可见转矩协调控制对车辆的行驶轨迹也有一定改善作用,提高了车辆的灵活性和安全性。
4 结论
在CarSim 软件中创建车辆动力学模型,在Matlab/Simulink 中建立模糊控制器、轮毂电机、横摆力矩控制器和转矩分配器模型,并联合仿真。目标轨迹与实际轨迹进行对比,发现有控制下的车辆其横摆角速度更接近理论值,运行轨迹更贴近目标曲线,其表明该控制策略的使用明显改善了车辆的横摆角速度和轨迹曲线。
