关于堆芯测量系统中子探测器运行位置偏差的分析与控制
2019-09-10李斌李小波
李斌 李小波
【摘 要】本文详细描述了中子探测器位置控制原理,对调试中出现的中子探测器位置控制偏差進行了详细分析,提出的技术方案使探测器能被传动装置精确地送达指定位置,解决了探测器运行过程中出现的大量位置报警故障,为系统投用及后续准确可靠运行提供了运行保障。
【关键词】中子探测器;位置偏差;位置开关
1.堆芯中子通量测量系统简介
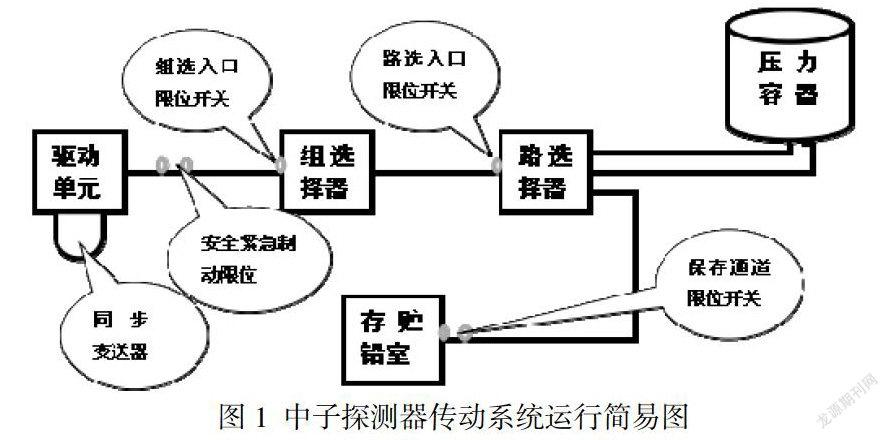
堆芯中子通量测量系统(FLUX)主要用于测量反应堆堆芯的中子注量率分布,在运行期间监测堆芯功率畸变,积累燃耗数据,对反应堆的安全运行、燃料料管理、最大允许功率的确定、各项实验的进行以及样品的辐照都有极其重要的意义。该系统设备由法国AREVA供货,主要组成包括:一个读出控制柜和分配柜,机电控制设备4套(传动装置包括驱动单元、组选择器、路选择器、探测器、位置开关),测量通道38路(电动阀、密封组件、手动阀、指套管、导向管)及存贮铅室。如图1所示。

2.中子探测器运行位置偏差的分析与控制
设备安装完成后,利用模拟探头对传动装置的控制精度进行全面的检验与功能调试。根据现场调试中出现故障分析总结如下:
2.1 传动装置中影响探测器位置精确控制的因素分析
探测器位置精确控制受以下几个主要因素影响:
(1)现场安装位置的偏差,受安装技术和现场物理位置及水平度等客观因素的制约,使传动装置安装位置与理论实际会存在一定的偏差,需要在安装初期严格控制,控制传动装置的物理位置和水平度,使其偏差降低到最小。。
(2)探测器实际位置与显示位置的偏差,主要由中子探测器螺旋电缆与驱动单元齿轮盘不同步以及螺旋电缆的制造精度引起,从而造成探测器实际位置与同步变送器反馈位置偏差,该问题需要通过调整驱动单元力矩以及驱动电缆转盘松紧度解决。
(3)软件参数设定值与位置开关(如图1)反馈不一致导致的控制偏差,根据现场安装实际情况来调试参数,使其偏差达到允许范围内。
前两种由安装质量决定,安装调试完成后基本确定,根据前2项固有偏差大小及偏差方向,主要通过调试软件设定参数来消除前2项固有偏差的方法,达到精确定位探测器的运行位置。
2.2 调试过程中出现的位置错误报警分析
调试过程中出现限位开关和位置错误报警如下:
(1)1-4号探头回抽到GS入口的过程中,探测器1、3动作,2、4不动作并出现Take up reel jam的报警,而1、3号探测器抽出到组选择器(GS)入口后再插回到保存通道,结果无法动作,都出现保存限位开关错误报警storage switch fault。
(2)在探测器都抽出保存通道后却无法将其送至指定位置,存在多种故障现象,如1、2、4号探测器都可以送至路选择器(PS)入口,但再往前送9000步时就出现PS inlet switch fault故障;3号探测器根本不动作,无法控制,出现Take up reel jam报警;复位报警后再尝试将其送至保存通道也无法实现,并出现storage switch fault报警,同时出现Flux detector position fault Chanel X报警。
2.3 探测器位置偏差的调整与控制
(1)对于2、4号探测器,根据故障报警提示Take up reel jam,调试组分析可能的原因为:①驱动电机驱动力不足;②探测器与驱动齿轮卡塞,③供电系统断路导致的自动制动保护;④限位开关故障导致位置报错。通过对每一种可能因素及故障排查,从检查380V电源,再检查驱动离合器的力矩,调节驱动轮与驱动电缆松紧度并尝试手动抽出探测器,确认驱动单元控制功能正常;再结合1、3号探测器出现的storage switch fault报警,将问题重点转到保存通道限位开关,经检查储存通道限位开关发现装反且接线方式有错误,根据技术规范,应该将两副常开触点并联才能实现双重保护功能,将其改正后探测器都能抽出保存通道,此问题解决。
(2)对于探测器无法送达指定位置故障,根据报警提示PS inlet switch fault和Flux detector position fault Chanel X,调试组决定将所有的限位开关都校验一遍,包括组选入口、路选入口、保存通道、以及各通道位置开关,但都未发现问题。最后通过反复动作探测器观察,探测器在从初始位置送至保存通道时虽然出现报警,但都是送到组选出口不远处就停止,且探测器先高速再低速最后停止,4个探测器现象相同,说明软件控制命令能正常发出并接受,只是命令无法使探测器运行到指定位置。根据探测器的运行特点,分析很有可能是命令中指定的位置与实际位置不符,以致在其运行很短一段距离后软件认为其已到达所指定位置,从而自动停止,导致出现错误报警。通过测量其实际运行的距离为1.8m,比对软件初始参数发现保存通道位置参数都是设置在1800步,刚好与实际运行距离1.8m相符,而保存通道的实际位置在17000左右,修改软件位置参数到17000左右,探测器顺利回插到保存通道。以此类推,同样其他特定位置的设置参数也需要相应的调整。初步设定参数后再通过软件对比反馈的位置偏差信息反复调整,慢慢将误差调整到可接受范围内,从而消除偏差报警。
3.经验总结
控制系统发出位置控制命令后,探测器先快速移动到指定位置附近再转换成慢速运行,有150步低速调整,此时同步发送器将探测器实时位置数据反馈给控制系统,系统将根据实时位置与软件参数设置值比对,从而确定其是否到达指定目标位置并制动停运探测器。当探测器停运后实际却又没到达指定目标位置,指定位置限位开关未触发动作,控制系统将检测出不匹配现象,发出相应位置的限位开关错误报警。这也验证了之前分析出的探测器运行位置控制原理,软、硬件协同控制,相互验证达到精确控制的目的。通过分析顺利解决了位置偏差问题,保障了系统安全稳定投于运行。
作者简介:
李斌(1987-),男,湖南邵阳,中级工程师,本科,从事核电厂常规岛控制系统、全厂数字化控制系统等设备管理工作。
李小波,高级工程师,维修处,现从事核电厂全厂数字化控制系统等仪控运维工作。
(作者单位:海南核电有限公司)
