扫地机器人自主导航专利技术综述
2019-09-10高惠敏
高惠敏
【摘 要】本文主要针对扫地机器人自主导航技术的发展,统计扫地机器人在全球范围内的专利申请,对其进行分析,并基于专利分析结果总结了技术分支以及国内外重要申请人的技术路线,剖析扫地机器人自主导航的技术现状。
【关键词】扫地;机器人;自主导航;路径规划;室内定位;环境感知;专利
一、前言
扫地机器人因其简单的操作以及便利性,逐渐成为智能家居的一部分。扫地机器人通过自主导航技术实现路径规划以及避障,确保机器人能够以较高覆盖率以及低重复率完成清扫任务,这项技术需要传感器、定位系统以及路径规划等多学科支持,是扫地机器人的技术核心。
二、扫地机器人技术概述
九十年代末至二十一世纪初,欧美日韩的家用电器制造商不约而同将研发火力投入智能扫地机器人市场。2001年家电巨头ELECTROLUX推出三叶虫智能扫地机器人,依靠单片机控制底部车轮自主行动,机体装置的反射式超声波传感器为机器人提供避障能力。扫地机器人具有无监督自主工作的特性,其原本只是能够进行简单的清扫等工作的单纯机械设备,现在通过增加自动充电、路径规划、智能识别、智能交互等功能,成为智慧家庭中重要组成部分。扫地机器人是由传感检测系统、控制系统、移动和吸尘系统组成,其关键技术包括传感器技术、室内定位技术、路径规划技术和自动回充技术等。
三、扫地机器人的自主导航技术分支
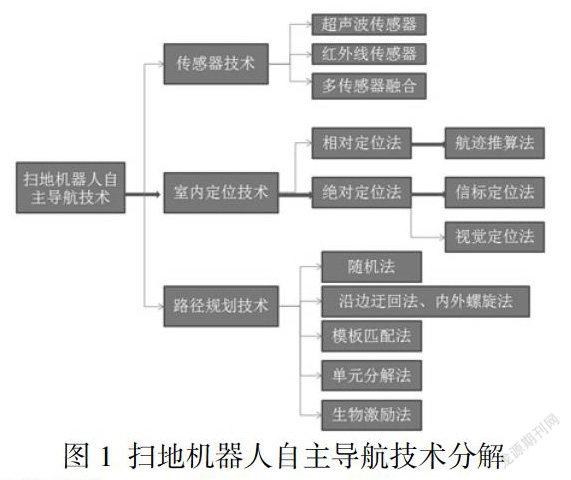
本文对扫地机器人自主导航技术的相关专利申请进行分析,基于CNABS、CNTXT中文数据库以及DWPI数据库,通过去噪、人工筛选、标引得到最终所要分析的专利数据样本,通过浏览上述专利申请以及参考相关文献,对所涉及的技术分支进行分解,如图1所示。

四、专利现状分析
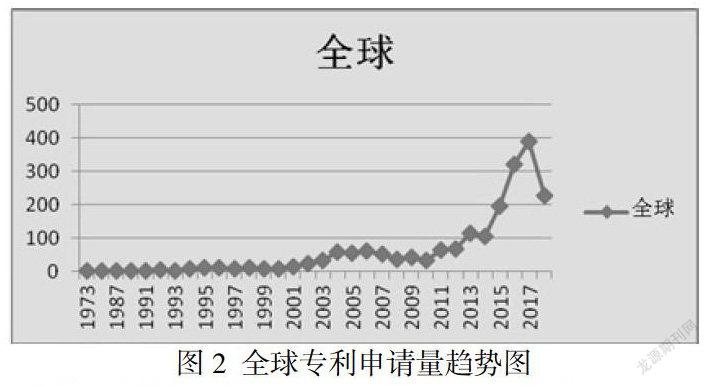
经过检索式检索与简单人工筛选,最终筛选出专利申请1633件。如图2所示,在全球范围内,最早的相关专利出现在1973年,但从1973-1993年的申请量较小,每年均在10件以下,处于技术探索时期。自1993年专利申请量缓慢增长,处于技术积累期,增长比较缓慢,随着传感技术、导航定位技术的发展以及市场需求,2011至今申请量呈现几何增长状态,处于快速增长时期。国内扫地机器人自主导航技术虽然起步较晚,但自2011年起专利申请量大幅增长,国内申请在整个全球的申请量中所占的比重越来越高。

從全球专利申请的国别分布来看,中国、美国、韩国、日本、欧洲国家是专利申请的主要原创国,上述国家和地区的申请量占到了全球申请总量的98%,也正是创新能力突出的国家和地区。中国和韩国分别占全球申请总量的50%和27%左右。中国作为人口最多,发展潜力最大的地区,一直都是各个申请人主要的目标市场地区。韩国的三星、LG,美国的IROBOT,日本的日立、夏普、松下、富士通,德国的VORWERK,瑞典的ELECTROLUX以及英国的DYSON,各国企业竞相发展,同时,中国国内以科沃斯、美的为代表的企业等后起之秀,所占比重越来越高,中国在扫地机器人领域的发展已跻身世界先进水平。
五、技术发展脉络与重点专利分析
本文分别从传感器技术、室内定位、路径规划这三个分支对技术发展的脉络作相应梳理,同时对各分支的重点专利进行分析。
1、传感器技术
三星公司在1993年提出一件公开号为US1993073398A的专利申请,该申请是较早的将通过超声波传感技术与定位导航结合的传感器技术相关专利。机器人通过超声波传感器检测与障碍物之间的距离,通过光学旋转编码器确定障碍物方向,机器人沿着房间外围移动,然后根据选定的程序覆盖到剩余的区域。1999年西门子公司提出了公开号为US6591216 B1的专利,该专利提出使用红外线传感器感知障碍物,以此来建立物体周围环境的热影像。2001年家电巨头ELECTROLUX推出三叶虫智能扫地机器人,依靠单片机控制底部车轮自主行动,机体装置的反射式超声波传感器为机器人提供避障能力,但在靠近尖角障碍物时,由于超声波反射的能力较少,难以检测,容易发生碰撞。而红外线传感器也存在探测视角小、很难探测到前方狭小障碍物、透明物体或深色物体等缺点,为了更好的描述环境,多传感器融合技术开始发展。三星公司在2012年提出一件公开号为EP2590042B1 B1的专利,其位置识别技术的研究主要表现在传感器融合,通过多传感器融合实现位置识别,提高位置估计的精度,进而通过滤波结构实现定位。
2、室内定位技术
科沃斯公司2002年在专利(CN2498979Y)中使用航迹推算法进行定位,但无法实现实时性精确定位。为了解决该问题,绝对定位技术开始急速发展。美国IROBOT公司提出(US8954192 B2)的专利申请,其使用信标定位法进行室内定位,在机器人上安装传感器对信标进行观测。随着市场对定位的精确要求越来越高,基于视觉的机器人定位近年来成为研究热点,中国各公司也开始重视该方面的研究与专利布局。基于视觉的定位主要包括单目视觉、双目视觉。目前,基于视觉定位的扫地机器人也已有产品推出,Irobot和Dyson分别推出了高端系列RoomBa980和360Eye。
3、路径规划技术
作为智能扫地机器人核心功能技术,规划一条满足任务要求的安全、有效、可行的路径,成为各项相关专利的核心讨论问题。早期扫地机器人多采用随机路径行进,如果不能建立环境地图,就只能采用随机路径。三星公司于1993年提出的,公开号为GB2278937B的专利中提及一种导航控制系统,采用沿边迂回的方法行进,常用的方法还有内外螺旋法等。虽然机器人路径规划已得到多领域长时间的关注,但至今智能扫地机器人仍没有最佳的路径规划方案,由于环境的不确定性,要求机器人在规划绕过障碍的前提下,还有自主避障的能力。近年来,如何实现全覆盖路线规划且提高效率与性价比,已成为研究热点。全覆盖路径规划方法多种多样,各有优劣,主要包括模板匹配法、单元分解法、人工势场法和生物激励法等。国内的扫地机器人技术起步较晚,科沃斯公司的相关专利也大多使用随机遍历法进行清扫。
六、结束语
本文梳理了扫地机器人自主导航技术分支的发展情况,并对自主导航的核心专利和重要申请人进行分析,有助于审查员全面了解相关功能的基本发展态势,对涉及扫地机器人领域的审查工作有一定帮助。
参考文献:
[1]柴剑,智能扫地机器人技术的研究与实现,西安电子科技大学,2013;
[2]朱冬梅,技术快速迭代扫地机器人行业洗牌在即,现代家电,2016
[3]薛瑞范,面向扫地机器人的室内定位研究,哈尔滨工业大学,2015
(作者单位:国家知识产权局专利局专利审查协作四川中心)
