煤矿救灾机器人井下可视导航技术探究
2019-09-10杜浩
杜浩
摘 要:深入研究救灾机器人井下可视导航技术有利于提升救灾机器人的可视能力、导航能力,保证救灾工作的顺利进行。尤其是灾后井下环境非常复杂、多变,常规的可视导航技术具有一定的局限性,无法助力于人们开展救灾工作。只有采取更加先进的可视导航技术才能提升救灾机器人的工作效率,缩短救灾时间,减少经济损失。首先分析了灾后煤矿井下环境的特点,其次分析了可以应用哪些技术实现煤矿救灾机器人的井下可视化,最后就如何完成可视化导航的设计进行了分析。
关键词:煤矿;救灾机器人;井下;可视导航技术
随着我国煤矿行业的迅速发展,救灾工作逐渐受到业界人士的广泛关注。与此同时,救灾机器人被研发出来,并被应用于救灾工作中。但是我国救灾机器人的研究工作起步比较晚,相关技术仍不够成熟。比如可视导航技术仍存在一定的缺陷,无法保证救灾工作的高效开展。所以,我国应继续加大相关技术的研究,逐步提升救灾机器人的应用水平。
1 煤矿灾后井下环境特点
当煤矿发生灾害之后,附近的巷道、工作面都会受到破坏,尤其是排水、通风、运输、照明、通信等设备也会出现不同程度的损坏。最重要的是有可能出现顶板冒落、巷道堵塞问题。这对于救灾人员来说是一个难度极高的挑战。因为道路堵塞会影响到救灾设备的实施,且各种设备的损坏会使外界无法得知煤矿井下的灾害状况,从而影响到救灾计划的制定。
另外,发生灾害后煤矿井下的视觉环境也会非常恶劣。因为井下环境本身就比较昏暗、潮湿,发生灾害后煤矿颗粒会大量悬浮在空气中,进一步加大井下环境的可视难度。最重要的是在正常作业状态下,为了防止瓦斯聚集,煤矿还会对综采工作面进行大流量的通风,粉尘会随风漂浮。而在这种状态下一旦发生灾害,通风会被阻断,内部温度在短时间内上升,积水也会增加。这时救灾机器人收集到的视频就无法直接观看,必须要经过处理。尤其是光照设备被损坏后,井下环境属于零照度环境[1],救灾机器人只能用自身携带的灯光照明。而救灾机器人携带的光源体积、功能有限,进一步增加了机器人的视觉导航难度。总的来说,灾后井下环境条件极其恶劣,给救灾机器人的探测带来了极大的困难。
2 煤矿救灾机器人的井下视频技术分析
2.1 视频图像增强技术
灾后煤矿井下没有光线,在救灾机器人传回的视频截图中除去灯光照到的区域,其他区域都是黑暗的。针对这种情况可尝试采用视频图像增强技术还原视频截图的清晰。
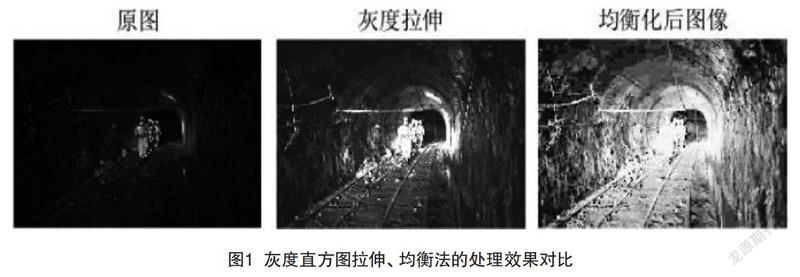
首先,黑暗环境下的视频图像增强方法包括直接对比度增强、间接对比度增强两种。最为常用的是间接对比度增强方法中的直方图拉伸、直方图均衡。(1)直方图拉伸主要是指在灰度直方图中拉伸对比度,增加前景、背景灰度差。这样画面对比度会得到有效优化。(2)直方图均衡是指将集中在某个灰度的原始图改变成均匀分布在整个灰度范围内,且将灰度直方图非线性拉伸,重新分配像素,从而获得不同灰度范围内像素数量相差无几的图像方法。就两者相比来说,直方图均衡法的算法更方便、快捷,且效果更明显,如图1所示。基本上,人们倾向于将这种算法作为机器视觉处理算法。其次,对于粉尘、潮湿造成的图像模糊问题,可采取暗道通道去雾图像增强算法。这是一种依据大量无雾图像统计规律而设计的算法。但是在实际应用中需要对该算法进行优化、改进,从而有效提升图像的清晰度。
2.2 机器人视频稳像技术
由于灾后井下地形崎岖、复杂,机器人在行走过程中难免会出现颠簸,尤其是机器人的行走速度越快,颠簸问题越严重。这种颠簸现象对视频成像质量的影响非常大,且镜头的来回晃动会造成操作人员眩晕。所以,要采取有效的视频稳像技术,确保视频图像的稳定。
目前常用的视频稳像技术包括软件计算偏移、加速度传感器采集偏移及云台弥补偏移两种方法。但是后者需要增加稳云台加摄像机的方式,会使得相机体积偏大。但从防爆、通讯等方面考虑,相机体积偏大不利于防爆、通风结构设计[2]。因此,可采用软件计算偏移方法,如FANSAC算法、FAST算法都可以用作机器人视频稳像处理算法。但是无论应用哪种算法,都应遵循以下实施步骤:(1)查找前一帧到当前帧的转换参数;(2)在每一帧处积累变化,得到横纵轴、角度的变化轨迹;(3)平滑轨迹;(4)创建新空间变换;(5)在视频及其输出中应用新空间变换。
2.3 热成像可视化增强技术
煤矿救灾机器人不仅要传输视频、图像,更要侦测危险源及被困矿工,而这离不开热成像仪。因为这种仪器非常适合探测生命体,且能够精准探测温度,帮助搜救人员确定被困矿工的生命体征,所以,在选择这种仪器时,应尽量选择高性能的产品,比如Seek Thermal XR微型热成像仪。该仪器能够探测到7~13 μm的红外线,且可放大倍率、调焦,尤其是可检测到2 000英尺外的热量。最重要的是与手机的兼容性比较好。
2.4 深度相机辅助可视化技术
采用深度相机的目的就是准确描述真实世界,提高物体的识别度。3D相机还增加了一个维度,更有利于环境深度信息的采集。
目前來说,深度相机有两种应用原理:(1)以反射时间为基础的深度测量,如SR4000;(2)以特征匹配为基础的深度测量,如Kinect。无论是哪种原理,深度相机都比较适合探测漫反射表面。但是灾后井下环境的安全性比较低,在应用深度相机时应先设计实验确定深度相机对煤质表面情况的识别程度及有效探测距离。确定这些参数之后,才能综合判定是否可将深度相机应用到救灾机器人的设计中。以华硕Xtion Pro深度相机为例,据有关实验显示,该相机的有效探测距离为5 m,且该相机结构紧凑、能耗低、易设计,非常适用于救灾机器人的结构设计。总之,针对煤矿安全来说,采用深度相机更方便救灾工作的开展。
3 以虚拟现实技术为基础的可视化导航设计方法
井下救灾机器人的工作空间有限,且地下管道建设复杂。此时,若不科学标示机器人的空间位置、运动状态,保证操作人员能理解机器人的反馈,并下达控制指令,势必会影响救灾机器人的使用性能,造成救灾工作的失误。对此,可尝试应用虚拟显示技术设计机器人井下导航系统。具体可按照以下步骤进行:
3.1 搭建可视化导航平台
在设计机器人井下导航系统之前,需充分考虑机器人的导航、穿越障碍、抗颠覆、定位、路径规划等行走特点,并以此为基础选择合适的机器人虚拟可视化导航系统开发平台。
首先,可选择Unity3D作为虚拟现实开发工具。将其作为虚拟现实开发工具具有以下优势:(1)它的脚本语言是C#,扩展性能比较好,且支持C++底层插件;(2)跨平台特性好;(3)交互性能好;(4)三维画质,可进行电影级图像渲染;(5)物理模拟能力强;(6)支持AI导航。其次,可选择人工三维建模、快速模块化拓展建模方式的搭建巷道模型,从而为可视导航、虚拟现实试验奠定良好的基础。再次,融入定位技术,提高机器人的定位水平,如利用GPS系统进行定位。或者利用无线射频识别技术(Radio Frequency Identification,RFID)无源定位技术进行大区域定位;利用标志牌识别技术进行全局定位;采用自适应蒙特卡洛定位技术进行局部定位。最后,利用深度相机进行定位与制图。
3.2 虚拟现实可视化导航设计
首先,按照煤矿救灾机器人提供的位置标识及导航信息、三维虚拟可视化平台显示三维场景、操作员观看并发挥控制指令、煤矿救灾机器人接受指令并作出反馈的步骤,明确虚拟现实可视化导航设计的基本步骤。其次,在井下巷道的关键专项、分叉节点等位置提前预埋传感器及定位标志物,随后在此基础上大致确定机器人位置,从而为操作人员的判断提供参考[3]。同时,利用虚拟现实引擎的AI特性进行机器人录井规划,使其生成救援线路[4]。这样既能节约救援时间,也能快速穿过障碍物,找到通行线路,加快救援。最后,开发出软件之后,还要进行软件试验,确定软件的可行性。
若要采用虚拟现实技术设计救灾机器人井下导航定位系统,就要合理选择开发工具,并借助建模工具进行矿井建模。同时,还要利用虚拟现实技术进行方位三维模型模拟。接下来,就可采用各种定位技术解决定位问题。完成上述操作之后,可以利用游戏引擎导航网格及其算法实现自主导航,并编制软件体现出机器人的导航功能。
4 結语
煤矿井下救灾机器人的可视导航技术研究仍在不断深入。在具体应用中,可结合实际需求灵活选择可视技术、导航技术,提升救灾机器人的应用水平。尤其是要充分引入新技术,不断优化、改进救灾机器人的可视化导航系统。
[参考文献]
[1]张立亚.煤矿井下救灾机器人视觉导航技术的研究[C]//北京:第21届全国煤矿自动化与信息化学术会议暨第3届中国煤矿信息化与自动化高层论坛,2011.
[2]孙辉辉,丁 军,张伟杰.煤矿救灾机器人防爆视觉系统设计与分析[J].华北科技学院学报,2015(5):55-59.
[3]朱正中.基于多传感器信息融合的煤矿救灾机器人自主定位研究[J].煤矿机电,2015(1):22-26.
[4]徐守江.基于蜂群算法的煤矿救灾机器人全局路径规划[J].煤炭技术,2014(1):168-170.