基于改进蚁群优化算法的中高速长网纸机速度链的控制
2019-09-10汤伟马强税宇阳王帅
汤伟 马强 税宇阳 王帅

摘要: 对中高速长网纸机而言,确保速度链控制满足工艺要求对纸机正常运行有着重要意义。目前,纸机速度链控制多采用常规PID控制,但中高速长网纸机由于自身传动点多、车速快,故对闭环系统的响应速度和控制精度要求高,常规PID参数整定方法难以满足上述控制要求。蚁群优化算法(ACO)是一种适合多目标寻优的全局搜索算法,但传统蚁群算法易陷入局部最优及搜索较慢的问题,对此,本课题将信息素因子(α)和启发式因子()按一定比例关系随迭代进行变化,提出一种改进蚁群优化算法,并将其应用于速度链PID控制器参数整定中。仿真结果表明,与常规PID控制相比,基于改进的蚁群优化算法PID控制系统响应速度更快、超调更小、抗干扰能力更好、鲁棒性更强。应用结果表明,该控制系统可保持纸机各部分速度长期稳定。
关键词:中高速长网纸机;速度链控制;改进蚁群优化算法;PID参数优化
中图分类号:TS736;TP273 文献标识码:A DOI:10.11980/j.issn.0254-508X.2019.11.007
Abstract: For medium and high speed fourdrinier paper machine, ensuring the speed chain control to meet the process requirements is of great significance for the normal operation. At present, the paper machine speed chain control mostly adopts conventional PID control. However the medium and high speed fourdrinier paper machine requires higher response speed of the closed-loop system and control precision due to it has multi driving points and high speed, so the conventional PID parameter tuning method is difficult to meet the above control requirements. Ant colony algorithm (ACO) is a kind of suitable for multi-objective optimization of the global search algorithm, in view of the traditional ant colony algorithm is easy to fall into local optimum and slower search problems, this article will change pheromone factor (α) and heuristic factor (β) according to certain ratio relations with iteration, an improved ant colony algorithm was prepared, and applied to the speed chain of PID control parameters setting. Simulation results showed that, compared with conventional PID control, the improved ant colony algorithm based PID control system had higher response speed, smaller overshoot, better anti-interference ability and stronger robustness. Application results showed that the speed of each part of the paper machine was stable for a long period.
Key words: medium and high speed fourdrinier paper machine; speed chain control; improved ant colony algorithm; PID parameter optimization
速度鏈控制是纸机正常运行的基础,一旦传动点之间的速比失衡或者速度波动频繁,就会造成纸张的断裂或堆积,从而导致停机事故的发生[1-3]。造成传动点速比失衡的原因较多:在卷取部,电机拖动的负载随时间的变化发生改变从而导致传动点速度变化,如果不能快速准确地调整,则会导致速比失衡,若电机供电电压出现波动,也会导致速比失衡;纸机车速调整时,如果某一部分速度响应不及时,则会造成断纸[4]。因此,对于传动系统速度链的控制十分重要。目前,速度链的控制一般采用PID控制,PID的参数整定大多采用试凑法和人工经验进行整定[5]。但对于中高速长网纸机,由于车速快、传动点多、传统的参数整定法得到的参数难以满足高速运行情况下速度链控制系统对响应速度和精度要求。
蚁群优化算法(ACO)[6]是一种通过模拟自然界中蚂蚁寻找觅食最优路径而提出的仿生智能算法,具有正向反馈机制、鲁棒性强等特点,目前多应用于解决旅行商问题,通过在较优路径上增加信息素浓来增大下次寻优过程中被选择的概率。而评判路径优劣的准则由目标函数决定。利用蚁群算法的这些特点,将其应用于PID参数优化之中,通过对信息素浓度增减的判定标准进行修改,将目标函数改为与闭环控制系统超调量σ、上升时间tr和调整时间ts有关的函数,以此来判断闭环控制系统性能并作为信息素浓度增减的标准。对于性能较优的路径增加信息素浓度,可以提高被选择的概率。
本文在简要阐述速度链控制基本原理的基础上,将课题组改进的ACO用于PID控制器参数的改进,并将所得PID控制器用于造纸机传动速度链的控制。以仿真及应用结果证明论文算法的有效性。
1 速度链控制原理
纸机传动系统如图1所示,一般包括成形部、压榨部、干燥部、压光和卷取等几部分[7]。其中每部分都包含了一个到几个不等的导辊,其中一些导辊与电机相连,称为传动系统的传动点。剩下的导辊则是在传动点的驱动下,由网布或毛布拖动运行[8]。
所有的传动点共同组成一个链式结构,称为速度链。在纸张的生产过程中,由于工艺原因会造成纸张的延展伸长。因此,对于传动系统各个部分的速度要求也有所不同,所以必须对各传动点电机进行速度控制,保证各传动点速度稳定,相邻传动点之间速比稳定[9]。
2 ACO的改进
2.1 ACO的基本思想
蚂蚁在寻找食物时会在经过的路径上释放一种叫信息素的物质,在距离食物较短的路径上,信息素挥发的慢,残留浓度高,会吸引更多蚂蚁,最终所有的蚂蚁都会选择同一条路径,即为蚁群优化算法(ACO)[10]。
2.2 ACO数学模型
假设给定n个城市,从某一城市出发访问其余各城市1次后,再回到原出发城市,要求寻找出一条最短线路。在初始时刻,假设寻优过程的每条路径上的信息素浓度都相同。定义(0)=C(C是一个常数),蚂蚁k(k=1.2.3…m)在寻优过程中,根据各条路径上信息素浓度的大小以一定的概率(t)决定转移的方向,(t)可表示为式(1)。
式中,为路径(i,j)的能见度;(t)为t时刻路径ij上的信息素量;α为信息素的相对重要性(α),称为启发因子;为能见度的相对重要性(),称为期望启发因子。
蚁群中的m只蚂蚁全都完成一次旅行后,对城市间信息素含量的更新见式(2)和式(3)。
式中,为蚂蚁k在本次循环中留在路径ij上的信息素量;为信息素的持久因子,()。
通常用ant-cycle system作为基本的讨论模型,该模型能够体现全局范围内最短的路径,同时也能够提高系统的收敛速度。其表达式见式(4)[11]。
2.3 ACO的改进及仿真
蚁群算法是求解组合最优问题的常用方法,具有较好的寻优效果。但该算法本身也存在一些缺陷,如寻优过程花费时间较长、容易出现停滞现象、陷入局部寻优等[12]。导致这些问题的主要原因是α、的选取不当。本文通过多次仿真实验发现在迭代过程中改变α、的比例关系会取得很好的实验结果。迭代初期,将α值设定的较小,值设定的相对较大,以启发式作为蚂蚁状态转移概率的一个主要参考因素,蚂蚁选择道路的概率大小主要由启发式决定,从而避免了信息素浓度的积累导致的局部寻优;随着迭代的进行,将α值变大,同时减小β值,增加信息素浓度在概率选择上的重要程度,会使信息素浓度高的路径上的信息素浓度近一步积累,加速蚁群算法的收敛速度,得到最优路径。α、比例关系如式(5)所示。
以31个城市的旅行商问题为例。蚁群在31个城市随机出发,游历一星期,求经过所有城市的最优路径。
图2为传统蚁群算法旅行商问题仿真结果,整个过程经过65次迭代左右得到最优路径,其中,Lbest=15601.9195329187。
按上述优化过程对传统蚁群算法进行优化改进,经优化后的蚁群算法路径寻优如图3所示。虽然前期收敛速度缓慢,但是中期加速收敛并经过52次收敛得到最优解,最优路径Lbest=15588.2935578277。
仿真实验表明,经过对蚁群算法的改进可以加快收敛速度,且经过改进的蚁群算法在寻优过程中最优路径比传统蚁群算法所得最优路径更短,结果更优。改进蚁群算法部分程序如图4所示。
3 基于改进ACO的PID参数优化
图4 改进ACO的程序图
3.1 基于改进ACO的PID控制系统结构
PID控制因为去结构简单、易于实现,目前被广泛的应用于工业控制,其控制系统原理图如图5所示。
当系统连续时,控制量与偏差量满足式(6)[13]。
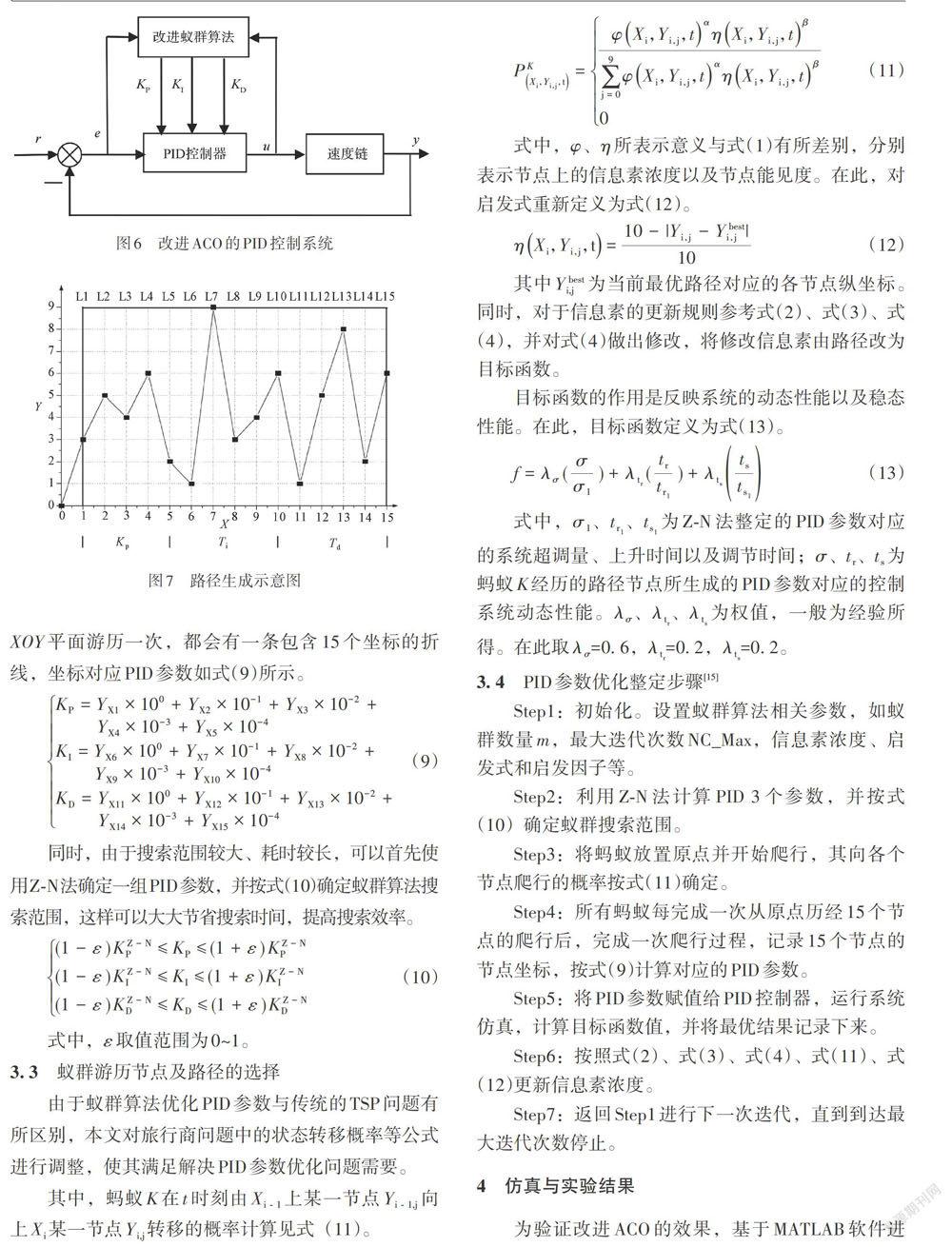
式中,u(n)为第n次控制量,e(n)为第n次误差,为比例系数,、分别为积分时间常数和微分时间常数。且=/,=·,一般来说一组,可以决定控制系统性能的好坏。基于改进ACO的PID控制系统图如图6所示。
3.2 蚁群游历节点及路径的生成[14]
利用改进ACO对PID参数优化过程:在XOY平面生成蚁群寻优路径,同时定义每条路径对应的PID参数。假设3个优化参数都有5位有效数字,小数点前面1位,后面4位。因此在设计XOY平面的过程中,每個单位横坐标代表1位有效数字,横坐标一共有3×5=15位,每个有效数字的取值范围在0~9之间也就是10位。所以XOY平面设计横坐标有15个单位长度,纵坐标为10个单位长度如图7所示。
图7代表蚂蚁随机选择的一条路径,蚂蚁从原点出发,经过每个横坐标时随机经过该横坐标与纵坐标相交节点(i=0,1,2…15),直到最后到达,在此过程中一共经过了15个节点。蚂蚁每在XOY平面游历一次,都会有一条包含15个坐标的折线,坐标对应PID参数如式(9)所示。
3.3 蚁群游历节点及路径的选择
由于蚁群算法优化PID参数与传统的TSP问题有所区别,本文对旅行商问题中的状态转移概率等公式进行调整,使其满足解决PID参数优化问题需要。
其中,蚂蚁K在t时刻由上某一节点向上某一节点转移的概率计算见式(11)。
式中,、、为Z-N法整定的PID参数对应的系统超调量、上升时间以及调节时间;、、为蚂蚁K经历的路径节点所生成的PID参数对应的控制系统动态性能。、、为权值,一般为经验所得。在此取=0.6,=0.2,=0.2。
3.4 PID参数优化整定步骤[15]
Step1:初始化。设置蚁群算法相关参数,如蚁群数量m,最大迭代次数NC_Max,信息素浓度、启发式和启发因子等。
Step2:利用Z-N法计算PID 3个参数,并按式(10)确定蚁群搜索范围。
Step3:将蚂蚁放置原点并开始爬行,其向各个节点爬行的概率按式(11)确定。
Step4:所有蚂蚁每完成一次从原点历经15个节点的爬行后,完成一次爬行过程,记录15个节点的节点坐标,按式(9)计算对应的PID参数。
Step5:将PID参数赋值给PID控制器,运行系统仿真,计算目标函数值,并将最优结果记录下来。
Step6:按照式(2)、式(3)、式(4)、式(11)、式(12)更新信息素浓度。
Step7:返回Step1进行下一次迭代,直到到达最大迭代次数停止。
4 仿真与实验结果
为验证改进ACO的效果,基于MATLAB软件进行仿真实验。纸机速度链系统可视为由变频器和三相异步电机组成。在仿真建模过程中[12],可将异步电机近似看作输入为频率f、输出为转速n的单变量线性环节,其传递函数为,。把变频器也看作一阶惯性环节,当变频器输入控制电压为u,输出为f时,其传递函数为,其中。按照控制系统的基本参数可设定控制器的控制对象传递函数为式(14)[16]。
4.1 设定值跟踪性能比较
分别将改进ACO与传统ACO、Z-N法进行仿真实验对比,3种不同控制方法整定出的PID参数如表1所示,搭建的Simulink模型如图8所示。
系统在3种控制方法下,分别加入单位阶跃信号,实际生产中,纸张定量及种类发生变化时均会对系统产生干扰,为验证系统的抗干扰性,在第30 s添加幅值为1的阶跃信号作为干扰信号,最终获得的系统阶跃响应曲线如图9所示,阶跃响应下的系统动态性能指标如表2所示,阶跃扰动下的系统动态性能指标如表3所示。
由表2可知,与Z-N法及ACO相比,改进ACO控制系统超调量最小,调整时间最小。由表3可知,在加入阶跃扰动的情况下,基于改进ACO令系统的超调量最小,波动时间最短,说明改进ACO的系统响应速度最快、调节时间最短、抗干扰性能最好。
4.2 鲁棒性能比较
实际生产中被控对象数学模型受非线性因素的影响而失配,失配20%后的数学模型仿真如图10所示。
在被控对象模型失配的情况下,分别对3种控制方法加入阶跃信号,并在第30 s加入幅值为1的阶跃信号作为干扰信号,最终获得的模型失配下系统阶跃响应曲线如图11所示,阶跃响应下的系统动态性能指标如表4所示,階跃扰动下的系统动态性能指标如表5所示。
上述仿真结果表明,与Z-N法及传统ACO相比,基于改进的ACO PID控制系统在被控对象数学模型失配时在速度链闭环控制系统中的响应速度更快、超调量更小抗干扰能力更强。且经过改进ACO优化的PID参数鲁棒性更强。
5 算法实现及应用
目前,该算法已应用于保定某造纸厂传动控制系统。在实际设计中,选取S7-400PLC,变频器及三相交流电机与工业控制计算机组成纸机的三级传动控制系统,各级之间通过profibus-DP或光纤实现通信,同时使用OPC技术,实现在上位机中的MATLAB与WinCC进行数据交换。其中图12是长网纸机卷取部速度实时监控图,在卷取过程中,电机带动的导辊负载时刻发生变化,监控图显示,卷取部分速度平稳,波动幅度很小。纸机正常运行,无断纸停机情况发生。
6 结 论
本文提出的基于改进蚁群算法(ACO)的PID控制既提高了蚁群算法的收敛速度,又解决了算法本身因为影响因子所导致的局部寻优问题,与传统ACO相比,改进后的ACO具有更好的寻优结果。同时,MATLAB仿真结果也表明,在速度链控制系统中,基于改进ACO的PID控制系统相较于传统ACO PID控制系统和常规PID控制系统的响应速度更快、超调量小、抗干扰能力更强且鲁棒性也更好。速度链控制系统运行结果表明,各传动点速度可以更好地跟踪设定值,速度波动幅度很小,车速升降各传动点速度响应快,各部分之间速比稳定。纸机可保持长时间不断纸、不停机,有效减少了企业因停机造成的损失。
参 考 文 献
[1] Feng Haichuan. Design of transmission control system for high speed paper machine[D]. Jinan:Shandong University,2007.冯海川. 高速纸机交流变频分部传动控制系统设计[D]. 济南:山东大学, 2007.
[2] WANG Sue, HAO Pengfei. Present Situation and Development Trend of Paper Machine Transmission System[J]. China Pulp & Paper, 2007, 26(1):52..王素娥, 郝鹏飞. 纸机传动系统的现状及发展趋势[J]. 中国造纸, 2007, 26(1):52..
[3] JIN Yongfan. Application of Master-slave Control in Paper Machine Drive System[J]. China Pulp & Paper, 2006, 25(1):67.金勇范. 主从控制在纸机传动系统中的应用[J]. 中国造纸, 2006, 25(1):67.
[4] MA Wenming. Design and Application of Paper Machine Drive Control System Based on A-B Platform[J]. China Pulp & Paper, 2017, 36(4):55.马文明. 基于A-B平台的造纸机传动控制系统设计及应用[J]. 中国造纸, 2017, 36(4):55.
[5] Zhong Liang. Design of Electric Drive Control System of Paper Machine Based on PLC[D].Beijing : North China Electric Power University ,2014.钟 亮. 基于PLC的纸机电气传动控制系统设计[D]. 北京:华北电力大学, 2014.
[6] Pin Z , Xiao-Ping L , Hong-Fang Z . An ant colony algorithm for job shop scheduling problem[C]// Intelligent Control and Automation, 2004.
[7] XU Deyu. Paper Machine Frequency Conversion Drive PLC Control[J]. China Pulp & Paper, 2005, 24(10):48.许德玉. 纸机变频传动的PLC控制[J]. 中国造纸, 2005, 24(10):48.
[8] Chen Xi.Research on Section-drive Multi-motor Synchronous Control System of Paper Machine[D].Jinan:Shandong University, 2009.陈 曦. 造纸机分部传动多电机同步控制系统研究[D]. 济南:山东大学, 2009.
[9] MENG Yanjing, LI Honglei. Research on Transmission Control System of High-speed Sanitary Paper Machine[J]. China Pulp & Paper, 2011,30(6):53.孟彦京, 李红垒. 高速卫生纸机传动控制系统研究[J]. 中国造纸, 2011, 30(6):53.
[10] Duan Haibin. Principle and application of ant colony algorithm[M]. Beijing:Science Press, 2005.段海滨. 蚁群算法原理及其应用[M]. 北京: 科学出版社, 2005.
[11] Zhang Jihui,Gao Qisheng. A Self-Adaptive Ant Colony Algorithm[J]. Control Theory and Application, 2000, 17(1):1.张纪会, 高齐圣. 自适应蚁群算法[J]. 控制理论与应用, 2000, 17(1):1.
[12] LI Qian,SHE Du,TANG Wei. The Application of Improved Ant Colony Algorithm in the Advance and Retreat Control of Disc Mill[J]. China Pulp & Paper,2017,36(9):48.李 茜, 佘 都, 汤 伟. 改进蚁群算法在盘磨进退刀控制中的应用[J]. 中国造纸, 2017,36(9):48.
[13] CHEN Shuqian,ZHANG Lihong. Application Reaerrch about PID Parameters Optimization Based on Ant Conlony Algotithm[J]. Computer Simulation,2011(1):238.陳书谦,张丽虹. 蚁群算法在PID控制器参数优化中的应用研究[J]. 计算机仿真,2011(1):238.
[14] Tang Wei,Feng Xiaohui,Sun Zhenyu,et al. PID parameter optimization based on ant colony algorithm [J]. Journal of Shaanxi University of Science & Technology, 2017, 35(35):153.汤 伟, 冯晓会, 孙振宇,等. 基于蚁群算法的PID参数优化[J]. 陕西科技大学学报, 2017, 35(35):153.
[15] Duan Haibin,Wang Daobo,Huang Xianghua,et al. Research and realization on parameters optimization of PID controller based on ant colony algorithm[J]. Engineering Journal of Wuhan University, 2004, 37(5):97.段海滨, 王道波, 黄向华, 等. 基于蚁群算法的PID参数优化[J]. 武汉大学学报(工学版), 2004, 37(5):97.
[16] Wei Yanfang. Research on the Variable Domain Fuzzy PID Control of Paper Machine Synchronous Drive System[D]. Jiaozuo: Henan Polytechnic University,2009.韦延方. 纸机同步传动系统的变论域模糊PID控制研究[D].焦作:河南理工大学,2009.
(责任编辑:董凤霞)
