基于机器视觉系统的智能化验机器人设计与分析
2019-09-09张文博郑溟天李杰
张文博 郑溟天 李杰

摘要:本文主要研究了一种用于水质化验的视觉SCARA机器人,并阐述了整个化验机器人的结构及手眼标定,视觉识别的模型构建与实验。在进一步完善以后,使智能化验机器人可以在水质检测工作中发挥重要作用。
关键词:电动抓手 手眼标定 边缘检测
1 引言
随着我国的发展,污水处理行业已然作为国家新兴战略产业之一——节能环保产业中的重要内容受到广泛关注,国家“十三五”规划也对城镇污水处理提出更高要求,并明确要求县级镇、尤其是重点镇必须建立污水处理厂。在智慧水务和无人管控概念的提出后,污水处理厂也开始走向无人化运营体系。由此,本作品旨在设计一种应用于污水处理厂,包括完全取代人工,完成对每日水指标化验分析的机器人。
2 研究内容
针对污水处理工艺流程、水质化验工作流程、化验工作人员投入等方面调研。发现现在急需研发一套不需人员操作,能够实现自主化验的智能系统,取代人工化验,提升化验精度,实现精细化管理的同时减少人员投入成本。
(1)实现进、出水口24小时混合样的检测;
(2)能够实现总磷、总氮、氨氮、COD水质指标的检测;
(3)进、出水口总磷、总氮、氨氮、COD每日检测一次;
(4)检测数据能够实时备份及上传信息中心;
(5)具有自动上样、消解、测定、移出功能;
3 设计方案
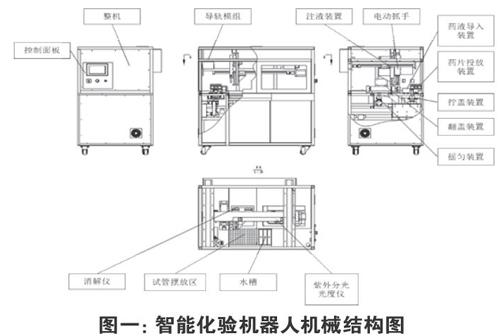
根据美国水质监测检测系统DR6000设计方案,结合我国国家水质监测相关条例设计化验机器人。整体机械结构如图一:
机器人系统需求主要有:三坐标机械手运动定位;药剂试管定位;滴定试剂的量;翻转盖子的控制;监测数据的保存通信设备的稳定性拧盖系统的配合。
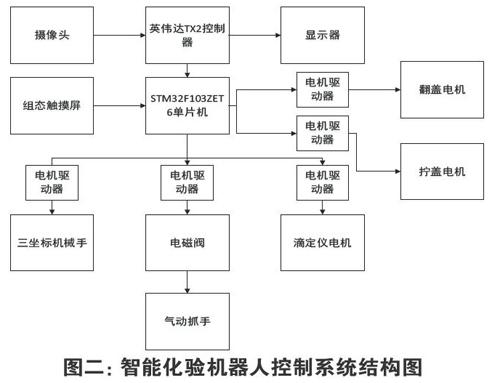
控制程序流程图如图二所示
3.1 智能化验机器人系统功能:
智能检测水质化验机器人可根据不同的检测指标完成不同的检测步骤,在检测过程中,安装在导轨模组上的电动抓手抓取药品试管放在开盖装置工位处并将瓶盖取下,注液装置吸取调配好的水样,注入试管中,之后,该装置系统可根据具体实验步骤需求可完成如下动作(各检测动作可根据具体化验步骤调整):取下盖的试管移动到投放药品装置下,接受从该装置中掉下的药片,也可移动到药液导人装置下,接受从该装置中导人的药液;加入药品后的试样,可重新旋上盖子,并由电动抓手送到摇匀装置处,将药品充分摇匀;检测过程中,有时也需要根据具体操作步骤,将密封在试管盖上端的药品混合人试样中,此时就需要利用翻盖倒置将盖子倒置并重新拧在试管上,之后送人摇匀装置中摇匀:当试管需要加热时,利用电动抓手将试管放入消解仪中,加热到指定温度,并取出,放在试管摆放区降温;最后,将试管放入紫外分光光度仪中,该仪器可根据试管上的条形码,完成不同检测指标的检测。可根据紫外分光光度仪获得最后的检测指标,并上传给电脑,完成数据的传输、存储。
3.2 机器视觉系统设计:
利用工业机器人手眼标定对机械手进行定位。想要达到对机械手位置坐标的高精度视觉定位,就需要保证对模型的高精度标定。通过建模,我们可以将化验机器人的手眼标定问题转化为求解AX-XB方程的问题。其中AA为机器人末端连杆坐标架在机器人摄像机系统移动前后的转换关系,B为摄像机坐标架在移动前后的相对关系。为唯一确定手眼矩阵的各分量,至少需要旋转轴不平行的两组运动。由于在观测中一般存在噪声,因此在实际测量中一般需要多组运动来求解该方程。
因此为确定手眼矩阵的各个分量需要旋转轴不平行的两组运动,为避免运动中,因观测噪声影响精度,一般用多组运动来求解该方程。
假设有多组观测值“AI,B1),(A2,B2),,(Ak,Bk)},求解AX_XB方程可以轉化为如下问题。
d表示在欧式群上的距离测度,最后通过李群理论知识将该最小化问题转化为最小二乘拟合问题,可以得到简单明确解,实现化验机器人手眼标定。
3.3 试管定位及识别系统设计
针对药剂试管,我们通过摄像头获取图像后,利用加权平均法将图像转为灰度图,通过中值滤波器消除孤立的噪声点,它既能去除噪声又能很好的保护图像边缘,然后利用Sobel算子检测试管的边缘,利用相关系数算法进行预存模板匹配进行试管识别,通过二值化及边缘检测进行试管管身条形码的识别工作。
3.4 上位机软件流程设计
化验完成的数据可以通过XML文件自动入库到页面中展示,操作人员可以通过图表和查询功能对数据进行数据分析功能。可以直观的看出是某几项指标超标提醒化验人员查看当天数据。化验人员可以对其进行导出备份等操作。
4 结语
该智能化验机器人在水务行业的应用具有以下优势:
(1)高度的自动化程序,操作精准度高,各项化验指标能严格按照标准方法实行检测。
(2)工作效率高,化验流程稳定且一致性高。大大提高了水质化验数据准确性。
(3)解决化验人员技术水平和积极性的问题,解决了化验室人员管理问题,数据造假等问题。
(4)生产可复制性强,投入使用后更能减少大量人工成本投入,为企业增加效益。
我们的智能化验机器人保证化验数据的统一,为水务集团下~步实现实现长期、海量生产数据的智能专家辅助运营系统的搭建提供统一、完善的数据支持。
参考文献
[1]何文斌,董国华,蔡瑾宇,等.污水处理厂远程无人值守监控系统的研究与设计[J].工程技术,2016,7(12):202.
[2]王健强,程汀.SCA R A机器人结构设计及轨迹规划算法[J],合肥工业大学学报(自然科学版),2008,31(7):1027-1041.
