搭载POS数据的无人机影像提高定位精度的方法
2019-09-09贾鑫杨树文张志华闫如柳
贾鑫,杨树文,张志华,闫如柳
(1.兰州交通大学 测绘与地理信息学院,兰州 730070;2.地理国情监测技术应用国家地方联合工程研究中心,兰州 730070;3.甘肃省地理国情监测工程实验室,兰州 730070)
0 引言
无人机低空遥感系统是高分辨率影像获取和处理的新兴技术,具有机动灵活、应急响应迅速、成本经济低等优点,在中小区域的土地规划、工程勘察、灾害预警等方面发挥着重要作用[1-3]。无人机搭载位置和姿态系统(position and orientation system,POS)主要是由全球定位系统(global position system,GPS)和惯性导航系统(inertial navigation system,INS)组合而成,二者相辅相成,能够提高导航系统的稳定性和可靠性,极大地加快影像POS数据的获取速度,提升影像的处理效率[4-5]。
但是受到飞行平台、载荷的限制,机载POS数据无相应地面基站数据可以用于差分处理,无法搭载高精度的定位定姿数据。若要用大量地面控制点精确解算出影像的外方位元素,增加外业工作量,这与快速有效的成图理念相悖,且目前流通于市场的无人机获取的POS数据本身并不是摄影中心的外方位元素,因此机载原始POS数据含有一定的系统误差,不能直接将其视为正确的外方位元素而用于影像地理空间定位。鲁恒、李永树等[6]提出一种改进POS数据方法用于影像定位;张坤鹏、于广瑞[7]等自主设计飞行方案,利用差分全球导航卫星系统(global navigation satellite system,GNSS)技术获取高精度无人机影像外方位元素;马怀武、王俊强[8]提出利用实时动态(real-time kinematic,RTK)载波相位差分技术结合无人机影像POS数据进行影像坐标定位。以上方法均有效提高了影像定位精度,但是在进行POS数据纠正时未考虑到奇、偶行带间的影像外方位线元素误差具有相反性,且布设控制点较多,工作量较大。本文通过分析外方位元素系统误差来源,并在实验区内仅布设少量控制点,利用空间后方交会解算影像外方位元素,针对奇、偶行带间影像外方位线元素误差具有相反性,建立POS数据改正模型,纠正其原始数据,得到精度较高的影像外方位元素,为后续的影像处理提供了先前条件,提高了影像定位精度,加快了中小区域大比例尺成图效率。
1 坐标测量与转换
在摄影测量中,建立像方到物方的转换模型,根据像点与相应地面点求解其中的模型参数,利用RTK技术获得地面控制点坐标;在像平面坐标中,坐标原点通常是镜头主光轴与像平面相交的点,但是该点一般和影像几何中心不重合,因此对于像点的量测得首先获得获取影像的内方位元素x0,y0,f。
像素坐标用行列号表示,定义为(c,r);假设影像的宽为width、高为height,单位为像素。单个像素对应的尺寸为d,即像元大小。根据像素坐标转换像平面坐标公式(1)得到像点的像平面坐标。
(1)
地面点坐标以及POS 数据里的线元素数据都是地面测量坐标系下的坐标数据,即经纬度与高程(B、L、H)。建立空间后方交会模型时,必须统一坐标才能求解外方位元素,因此需要坐标转换,将已知点坐标数据及POS数据(B、L、H)转化为地面摄影测量坐标系(投影坐标系)下的空间坐标(X、Y、Z)。
2 单像空间后方交会
空间后方交会是摄影测量中一个基本问题,主要思想是:在已知若干地面控制点坐标和相应的像点坐标量测值,建立共线条件方程[9-10],反求影像在无人机飞行摄影时刻的外方位元素,即Xs、Ys、Zs、φ、ω、κ。其中核心思想就是共线条件方程的建立:
(2)
式中:x,y为以像主点为原点的像平面坐标;x0,y0为像主点;f为像片主距;X,Y,Z为物点的地面坐标;Xs,Ys,Zs为外方位线元素;a1,a2,a3,b1,b2,b3,c1,c2,c3为外方位角元素表示的方向余弦。
由于共线方程是非线性函数,不利于迭代计算,因此需要将其线性化,按照泰勒级数一次项进行展开,并根据最小二乘平差原理,建立法方程[9-11],求解6个外方位元素的改正数dX,dY,dZ,dφ,dω,dκ。将原始机载POS数据作为函数运算的初值,计算仍采用逐步趋近的方法,最后得出6个外方位元素的解,如公式(3):
(3)
3 外方位元素系统误差分析
3.1 外方位线元素的系统误差
由于无人机上相机曝光位置(摄影中心)S与POS记录位置并非完全重合,存在一定的位移偏量,致使POS数据并非严格是影像的外方位元素,如图1所示。

图1 摄影中心S与POS位置关系
因此外方位元素存在系统误差,而系统误差主要来自于外方位的3个线元素(X,Y,Z)的偏移量[12]。一般而言,无人机飞行时近似与地面平行,然而实际过程中由于飞机不平稳性以及空气风力的影响,使得在高度(Z方向上)也会发生变化,存在不可忽略的偏移量ΔZ,因此由式(4)得POS数据与摄影中心的偏移量:
(4)
当无人机在设定好的区域进行拍摄照片时,飞行航线呈“S”状扫描整个区域,因此奇数行带和偶数行带的飞行方向正好相反,如图2所示。根据无人机飞行轨迹及奇、偶行带间无人机摄影中心外方位元素误差具有相反性,利用误差改正数分别对不同行带影像的外方位线元素进行改正。

图2 无人机相反航线误差偏移方向
3.2 外方位角元素的系统误差分析
在无人机摄影测量中,通过GPS/INS组合系统获取到无人机的定姿定态POS数据,但是POS数据中3个姿态角(俯仰角,横滚角,旋偏角)并不完全等于正射影像外方位角元素(φ,ω,κ),因此要进行坐标转换和系统误差改正[13]。
第一、由于POS数据中3个姿态角参数是惯导系统坐标系与导航坐标系(移动)间相应坐标轴的夹角,影像外方位角元素是像平面坐标系与地面摄影测量坐标系相应坐标轴的夹角,基于坐标系的不一致,所以要进行坐标转换,求解转换角。
第二、由于相机仪器安装工艺的原因,导致INS与相机的主轴并非完全平行,因此2个坐标系之间存在一定的夹角差,称为视准轴误差,一般小于3°。无人机在作业时,俯仰角与横滚角对φ角和ω角影响较小,其中视准轴误差主要表现在航偏角与κ角的偏差[14]。如图3所示,INS坐标系的3个坐标轴(xins,yins,zins)分别代表了本体坐标系的三坐标轴,相机坐标系相对于INS坐标系分别绕x轴、y轴、z轴旋转了α,β,θ。
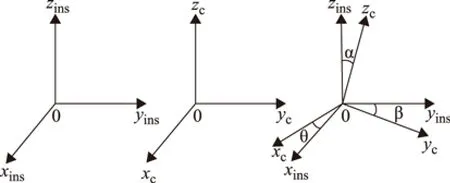
图3 INS坐标系与相机坐标系相应轴系间的旋转
4 误差改正模型
通过上节对系统误差的分析,掌握了系统误差来源,在此基础上,设计误差纠正模型,用以改正原始POS数据。主要内容:通过对无人机飞行拍摄获取的影像进行初始校正与挑选,选取区域内部且畸变程度小的影像,根据筛选影像在实验区域内布设少量控制点,然后利用RTK技术获取地面点坐标值求解相对应的影像外方位元素,并对POS中线元素和地面控制点进行坐标转换,将二者坐标统一到地面摄影测量坐标系下,建立改正模型。假设通过地面点解算获取到n张影像的外方位元素,并且每张影像对应有原始机载POS数据,计算每张影像经过地面控制点解算的外方位元素与POS数据的误差值,如式(5):
(5)
式中:i=1,2…,n,表示计算的影像张数;ΔXi,ΔYi,ΔZi,Δφi,Δωi,Δκi表示第i张影像外方位元素的改正值。若要选取全部影像的进行外方位元素的结算,反而复杂耗时且计算量大,因此用部分影像的POS数据误差值取均值进行整体误差改正,如式(6):
(6)


表1 不同飞行轨迹的奇、偶行带影像的X,Y元素误差改正值
5 实验内容
本文实验数据采用南方测绘天行H01300无人机进行拍摄影像,无人机采用5组镜头对实验区拍摄,通过2个架次的飞行,共获得影像250余张,本次实验不做倾斜摄影测量及三维激光扫描方面的研究,因此只选用下视镜头所拍摄的影像进行处理研究。研究区为兰州交通大学八教广场,实验区地形平缓,无较大高程差。本实验利用MATLAB设计影像后方交会及误差改正模型处理流程,纠正外方位元素。
由表2即可得部分原始机载POS数据与经过空间后方交会解算出的影像外方位元素相应的误差值,根据误差改正模型,针对不同航带间误差相反性,对影像原始机载POS数据进行改正,获得改正后的影像外方位元素。分别进行2次实验:①仅用原始POS数据且不添加地面控制点数据进行影像拼接及生成正射影像;同时也是检验原始的POS数据精度。②利用改正后的POS数据且添加地面控制点数据进行影像拼接及生成正射影像,将以上2次经过实验处理后的正射影像与地面控制点坐标进行对比检验实验结果精度。如图4所示,在相应实验所得影像中标记控制点位置。
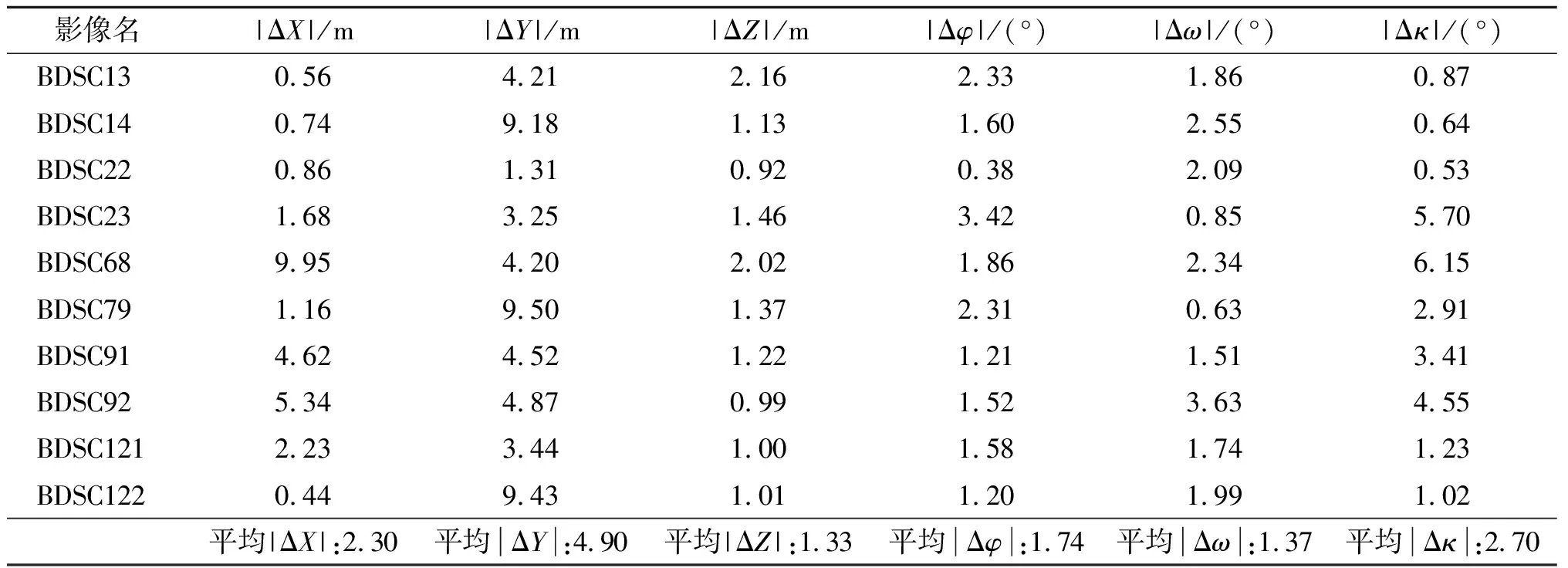
表2 原始POS数据与解算出外方位元素误差值

图4 2种POS数据生成的正射影像
经过RTK获取地面点坐标并在2张影像上对相应点坐标进行量测,得到表3。进而分别计算2张影像中地面点坐标与控制点坐标的误差值,设影像1和控制点坐标误差为ΔX1,ΔY1,影像2和控制点坐标误差为ΔX2,ΔY2。并求误差均值,如表4所示。仅用原始POS数据且不添加地面控制点数据生成正射影像的点误差较大,水平误差一般3 m左右,垂直误差在6 m左右,若要用该方法生成的影像直接用于目标定位,其定位精度较低。说明目前的无人机若没有搭载后差分POS数据处理系统,直接利用POS数据进行影像定位,其定位精度必受到很大影响,因此若要快速出图且对定位精度没有严格要求,这种方法比较适合。而根据原始POS数据,进行误差纠正后,影像的定位精度具有明显提高,水平误差为2.5 m,垂直误差为1 m,相比较第一种实验结果,第二种实验结果定位精度高,具有一定的可靠性。

表3 RTK与2幅影像点坐标对比
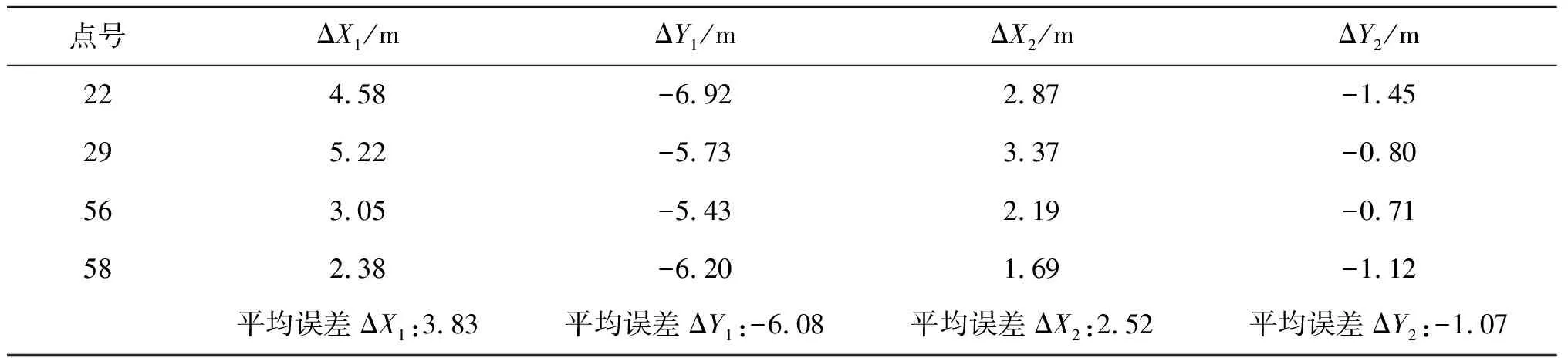
表4 纠正前与纠正后的误差对比
6 结束语
本文根据原始机载POS数据具有系统误差,无法直接用于影像地理定位的缺点,通过获取地面已知控制点坐标,建立POS 数据纠正模型,提高定位精度。通过原始POS数据与纠正后POS数据分别生成的影像间地物点坐标的对比,定位精度有了明显提高,且该方法符合于无人机影像快速成图的理念,具有更进一步的研究潜力。本次实验同时也存在不足:①没有对相机进行严格的相机标定,相机的内方位元素和畸变参数存在误差;②各个坐标系间的统一和转换问题,地理坐标系及投影坐标系间转换参数的不同会导致转换后坐标存在误差;③由于实验区覆盖影像数量庞大,误差纠正模型是针对实验区全部影像统一进行纠正,没有细化到针对每一张影像的POS数据误差进行纠正,所以模型本身也存在着误差。以后的工作重点根据以上问题进行研究探讨,进一步提高影像定位精度,探究在无控制点数据的情况下,该如何提高定位精度。
