HSL-PCA集成的GF-1影像阴影检测方法
2019-09-09,2
,2
(1.兰州交通大学 测绘与地理信息学院,兰州 730070;2.甘肃省地理国情监测工程实验室,兰州 730070)
0 引言
在高分辨率遥感影像中,由于地物对太阳光的遮挡而存在着大量的阴影。一方面,阴影的存在给高分辨率遥感影像地使用造成极大不便;另一方面,阴影也包含着纹理、形状、光谱等重要的地物信息[1]。因此,如何快速、准确地检测阴影信息在提升遥感影像应用潜力方面具有重要的意义。
目前,阴影的检测方法主要分为基于物理模型和阴影性质两类。基于物理模型的方法利用光线传播的物理性质,此方法需要影像中有关地物的地形,光照角度、传感器参数等先验知识建立几何模型实现阴影检测,通常计算较为复杂且应用于特定场景,因此具有较大的局限性;基于阴影性质的方法是通过分析阴影区域的亮度、几何结构和颜色深度等特征以及与非阴影区域的差异性来检测阴影,相关研究较多。如Kantsingh K等[2]提出在HSV模型中利用归一化差值指数和大津法阈值检测的方法;葛乐等[3]基于阴影在HIS色彩空间的特征,利用PCA提取其特征,开展了基于阴影概率约束的阴影检测方法研究;姚花琴等[4]提出基于主成分变换和多波段运算相结合的高大地物阴影检测方法;Vijayalakshmi S等[5]提出将主成分变换和内外轮廓线指数(IOPL)相结合的方法进行城市地物阴影检测;Srinath D等[6]提出利用直方图检测与内外轮廓线相结合的方法检测阴影;Huang W等[7]提出结合光谱和空间特征的阴影检测算法;Wang L等[8]提出面向对象的城市树木和建筑物阴影检测方法;Li P等[9]将不透明度概念引入阴影检测,并提出了一种软阴影描述方法和基于MRF的阴影检测算;Zigh E等[10]提出了一种基于超高分辨率影像(VHR)的密集城区阴影自动提取方法。
上述方法在特定的条件下取得了较好的阴影检测效果,然而大部分仍然存在以下问题:①对于中等高度地物的阴影研究较少;②对于地物阴影的半影区(亮度值较高)存在一定程度上的漏提;③偏蓝色地物和水体对于阴影检测结果存在干扰。由此,本文在前人研究的基础上,基于GF-1影像数据,提出一种结合主成分变换、多波段运算和HSL色彩空间变换的阴影检测方法。
1 阴影检测算法
1.1 典型地物光谱特征分析
高分一号(GF-1)卫星影像设有分辨率为2 m的全色影像和分辨率为8 m或16 m的多光谱影像。其中,多光谱影像包含近红外波段、红波段、绿波段和蓝波段。本文研究中先对高分一号2 m全色影像和8 m多光谱影像进行融合处理,并对融合影像中阴影的本影区和半影区、水体中清水和浊水、建筑物及道路的光谱信息进行统计,结果如表1所示,表1统计结果的均值和特征方差如图2、图3所示。
通过分析阴影及典型地物光谱值变化特征发现:①本影区的亮度值最低,较其他地物易于区分;②水体与阴影区域的亮度值相似;③在近红外波段,阴影的本影区和半影区DN值接近。
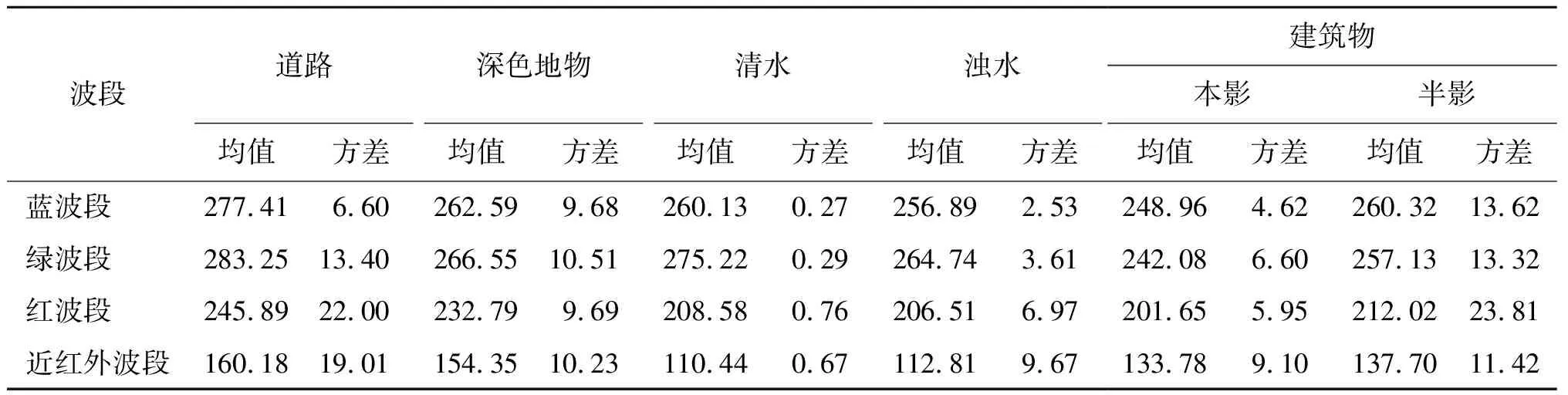
表1 阴影及典型地物光谱特征
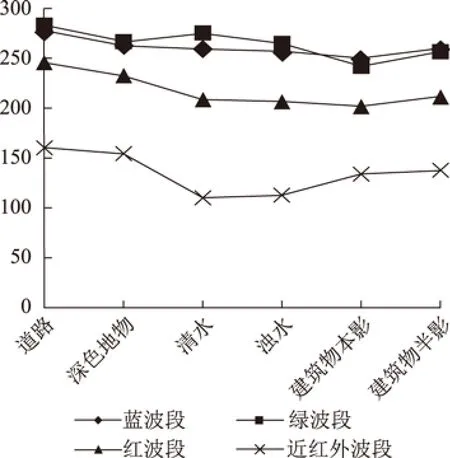
图1 典型地物光谱特征均值

图2 典型地物光谱特征方差
1.2 HSL色彩空间阴影区域的特征
HSL是一种将RGB色彩模型中的点在圆柱坐标系中的表示法,有亮度、色调和饱和度3个分量,比基于笛卡尔坐标系的RGB色彩模型的几何结构更加符合人类的感知特性[11-12]。
在HSL色彩空间中,阴影区域有以下特点:①本影区和RGB空间中的白色地物的色相值较低,半影区与水体色相值接近,不易区分;②本影区和部分颜色较深的半影区饱和度较高;③半影区和部分颜色较浅地物亮度较高。
1.3 主成分分析后阴影区域的特征
由于主成分分析(principal components analysis,PCA)获得的特征与HIS和C1、C2、C3等彩色不变特征具有良好的统计不相关性[13],因此,本文仅选取R、G、B 3个波段进行主成分变换。
鉴于第一主成分包含所有波段中90%以上的方差信息,故论文只分析第一主成分中阴影区域的特点,研究表明在第一主成分中,水体、深色地物、半影区及本影区的值接近,能够较好地区别于其他地物。
1.4 阴影检测模型的构建
通过上述分析,本文提出一种基于HSL-PCA集成的GF-1影像阴影检测方法。首先分割出图像的近红外波段,得到阴影初步检测结果。初步检测结果中含有道路和河漫滩等亮度值接近阴影的区域;然后对图像进行主成分分析,将RGB色彩空间转换为HSL色彩空间,再将图像中饱和度(S)与明度(L)相加,用第一主成分(PC1)除以饱和度(S)与明度(L)的和;最后选取合适的阈值,将近红外波段和经过波段运算(PC1/(S+L))后的图像分别提取出阴影区域。再运用逻辑与运算和形态学滤波对图像进行处理,得到准确的阴影信息。具体流程如图3所示。

图3 阴影检测方法流程图
1)根据阴影区域在近红外波段的特征,设定合适阈值,划分阴影区域和非阴影区域。分割后的结果记为S1,其中含有完整的阴影区域信息,也包含了一些颜色较深的道路信息和少量河道和河漫滩边缘信息,但不包含水体信息。
2)选取影像的RGB 3个波段做主成分分析,提取第一分量。将RGB色彩空间转换为HSL色彩空间,并提取S和L分量。运用阴影饱和度和亮度特征进行加和运算,增大阴影地区与其他地区差异。运用比值运算,进一步突出目标信息。得到的结果记为S2,其中含有水体信息及绝大部分阴影信息,但不包含河道和河漫滩信息。
3)将2次自动提取结果做逻辑与运算,消除了道路、河道、河漫滩、水体和其他干扰信息,又得到了绝大部分阴影信息,记为S3。最后将运算后的图像进行形态学闭运算,填充空洞,消除孤立点,使阴影信息更加完整。
2 实验及分析
选取高分一号融合影像中2个不同区域做实验,并对文献[14]中提出的阴影检测算法和本文算法进行对比和分析。计算结果如图4所示,白色为阴影区域,黑色为非阴影区域。
研究区一如图4(a)所示,图中含有水体(矩形框)和明显建筑物半影区(圆形框)。基于PC1/B的方法如图4(b)所示,本文检测算法如图4(c)所示。通过对比图4(b)和图4(c)得出,PC1/B算法不能有效区分水体与阴影区域,而本文算法能够有效区分水体与阴影区域,不存在水体误提现象;PC1/B算法不能有效检测出半影区阴影,本文算法能够完整有效地提取出阴影的本影区和半影区。
研究区二如图5(a)所示,图中含有大量建筑物阴影、偏蓝色地物、中等高度地物(矩形框中)。基于PC1/B的阴影检测算法如图5(b)所示;本文检测方法如图5(c)所示。通过对比图5(a)和图5(c)得出本文检测方法能有效去除偏蓝色地物影响,且能较完整地提取出阴影区域。通过对比图5(b)和图5(c)得出PC1/B算法不能有效地提取中等高度建筑物阴影,且对于高大地物的阴影存在大面积漏提现象。本文算法可较完整地提取高大地物的阴影区域,且对于中等高度地物阴影也能较好地检测。
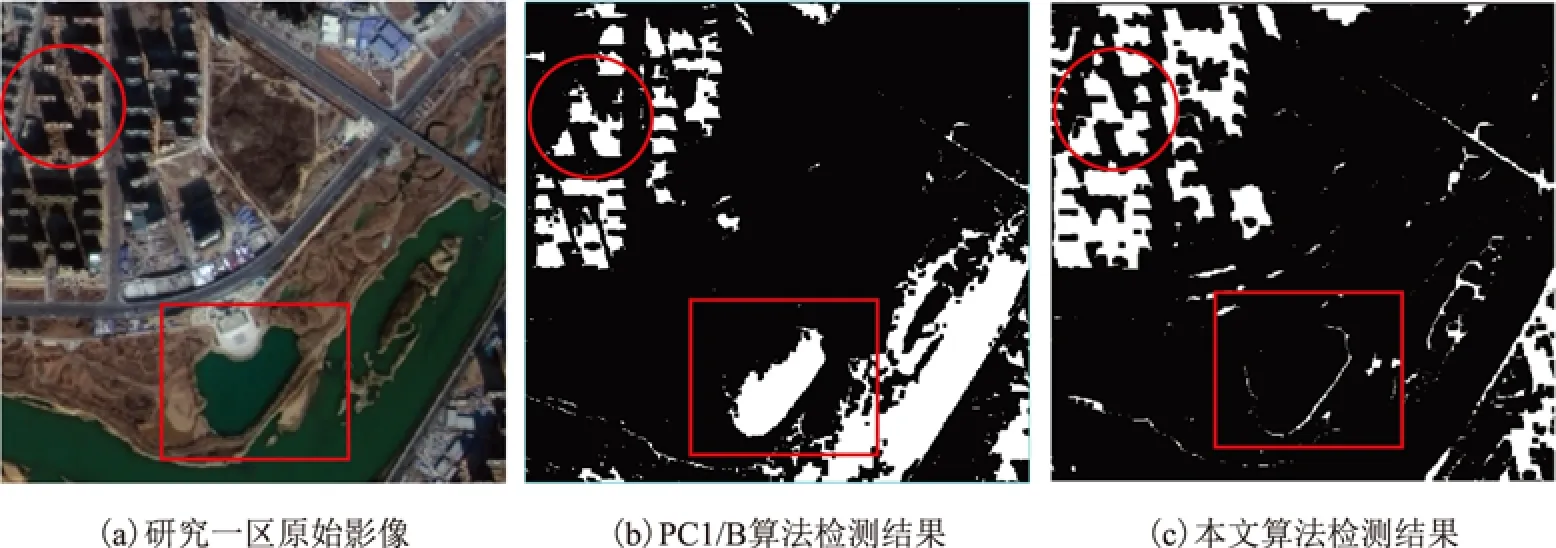
图4 研究一区阴影检测结果

图5 研究二区阴影检测结果
根据文献分析及实验验证表明,基于高分辨率遥感影像阴影检测的误差来源主要有两方面,一是难以提高对深色地物、水体和阴影区域的区分精度;二是对于亮度值较高的半影区部分难以检测。经过对 GF-1影像中典型地物光谱值进行分析得知阴影的本影区和半影区部分在近红外波段亮度值接近,并且和其他地物亮度值差异较大,易于检测,但也有一些其他细小区域被误提。因此,还要运用其他方法结合光谱特征提取阴影特征。
为了更加客观地分析上述2种方法的阴影检测结果,根据总体精度计算方法:
(1)
对2种检测结果进行定量分析,结果如表2所示,通过本文方法的正确提取比例为89.50%,PC1/B的方法正确提取比例为63.00%。通过比较,表明本文方法具有更高的提取精度。

表2 阴影检测结果及精度评定
3 结束语
本文提出的基于GF-1影像的阴影检测方法能有效区分水体和阴影,而且能较完整地提取建筑物本影区和半影区的阴影区域,同时避免了深蓝色地物的影响,检测精度达80%以上。
论文研究的不足之处在于阴影检测模型是根据高大地物与中等高度地物构建的,因此对于细小的阴影区域精度还需提高;对于部分阴影区域的细节的提取不是很清晰,模型还有待进一步改进。
