消费级无人机倾斜摄影测量技术在实景建模中的应用
2019-08-27孙亮


摘要:针对小区域构建三维模型,现有的建模方法需要大量的时间和人力物力,难以实现模型数据的快速获取、存储和在线浏览。本文提出了一种基于消费级无人机倾斜摄影技术获取实景三维模型的方法,介绍了通过消费级无人机进行倾斜摄影生产三维模型的流程和修复三维模型的方法,验证了通过消费级无人机进行倾斜摄影测量生成三维模型的几何精度,实现了实景三维模型入库、分析、标注属性、在线浏览和单体化的功能,最终实现了小区域快速生成实景模型和实景模行可视化,对实际生产有一定意义。
Abstract: To build a three-dimensional model for a small area, the existing modeling methods need a lot of time and manpower and material resources, and it is difficult to achieve rapid acquisition, storage and online browsing of model data. This paper presents a method of obtaining three-dimensional model of real scene based on consumer-level UAV tilt photography technology, introduces the process of production of three-dimensional model based on consumer-level UAV tilt photography, expounds the method of repairing the real scene model, analyses the geometric accuracy of three-dimensional model generated by consumer-level UAV tilt photography, and realizes the storage, analysis and storage of three-dimensional model of real scene. The functions of labeling attributes, online browsing and integration, realizing fast generation of real scene model and visualization of real scene model row, have certain significance for actual production.
关键词:消费级无人机;倾斜摄影测量技术;实景三维模型;精度分析;三维模型可视化
Key words: consumer UAV;oblique photogrammetry technology;real scene three-dimensional model;accuracy analysis;three-dimensional model visualization
0 引言
随着数字城市的发展,地理信息行业迫切需要逼真且高效的可视化信息,基于无人机倾斜摄影技术,可以快速准确的对目标区域进行实景建模,并通过物联网技术实现模型的可视化。实景三维建模技术能够通过多角度高分辨率影像,通过内业数据处理得到高分辨的、带有真实纹理贴图的三维实景模型。这种模型效果逼真,要素全面,而且可进行空间量测和分析。
近些年,随着无人机技术的快速发展,推动着消费级无人机产业快速爆发并且得到了广泛的应用[1-4],并且己成为一种新式快捷高效采集高分辨率影像的平台。专业级航摄无人机价格昂贵、起降场地要求严格且飞行操控需专业培训,而消费级无人机价格较低、操控简单,配合巡航软件即可快速获取高清数码影像,通过内业数据处理能达到专业型无人机的精度效果,对于小规模建模任务具有重要指导意义。
1 倾斜摄影测量技术
1.1 倾斜摄影原理
倾斜摄影测量技术是在飞行平台上搭载一台或者多台数码相机,从不同角度获取反映真实纹理的影像,结合地面控制点和POS数据,通过内业软件处理最终生产实景三维模型的技术[5]。
1.2 倾斜摄影特点
与传统垂直摄影相比,倾斜摄影主要有一下特点:①在得到地物的垂直影像的同时,还可以得到多个不同角度的影像;②同一区域存在多重分辨率的影像;③获取的影像有很高的分辨率和较大的视场角[6]。
2 消费级无人机
消费级无人机顾名思义,就是普通人都能够使用的无人机,一般的价格在几千到上万元不等,是用来消费、娱乐的机器。目前市场上的消费级无人机的品牌主要有大疆、零度智控、亿航、华科尔、派诺特等[7],一般单块电池续航时间在20分钟左右,自带智能云平台,搭载单镜头高清相机,搭载GPS接收机、磁罗盘和红外等多种传感器,具有多个飞行模式,如GPS模式,姿态模式和速度模式等。可具备自主飞行/半自主飞行地能力,即能够通过地面控制软件完成自动起降、定点悬停和路线规划等功能,使消费级无人机进入测绘行业成为可能。
2.1 消费级无人机航摄系统组成
消费级无人机航摄系统一般由无人机飞行平台、遙控器和操控平板电脑等几部分组成[8]。其中无人机飞行平台包含机身、云台相机、动力电池、螺旋桨等部分组成,用于航摄数据的获取。遥控器用于实施对无人机飞行平台的控制,如起飞、降落和姿态等控制。平板电脑用于飞控软件对航线的规划、上传以及图传显示。以大疆精灵4A为例,如图1所示。
2.2 消费级无人机特点
专业级无人机在国土测绘、数字城市、灾情检测和电力巡查等专业领域得到了广泛应用[9-11],但是消费级无人机在小区域测绘地形图、实景建模、土石方计算中具有很大的优势,一定会得到良好的发展。消费级无人机与专业级无人机相比有以下几种优势:
①机动灵活、向应时间短,因为消费级无人机高度集成化,可以快速安装与拆卸,体积小,便于携带,对起飞场地要求很小。②相比于专业无人机,消费级无人机价格便宜,作业成本的也很低。③在空域申请方面,相对于专业级无人机,消费级无人机空域易于申请。 ④分辨率高,由于飞行高度低,可获取1-2厘米分辨率的影像。
3 基于消费级无人机倾斜摄影获取实景三维模型的流程
3.1 基于消费级无人机倾斜摄影获取实景三维模型的流程
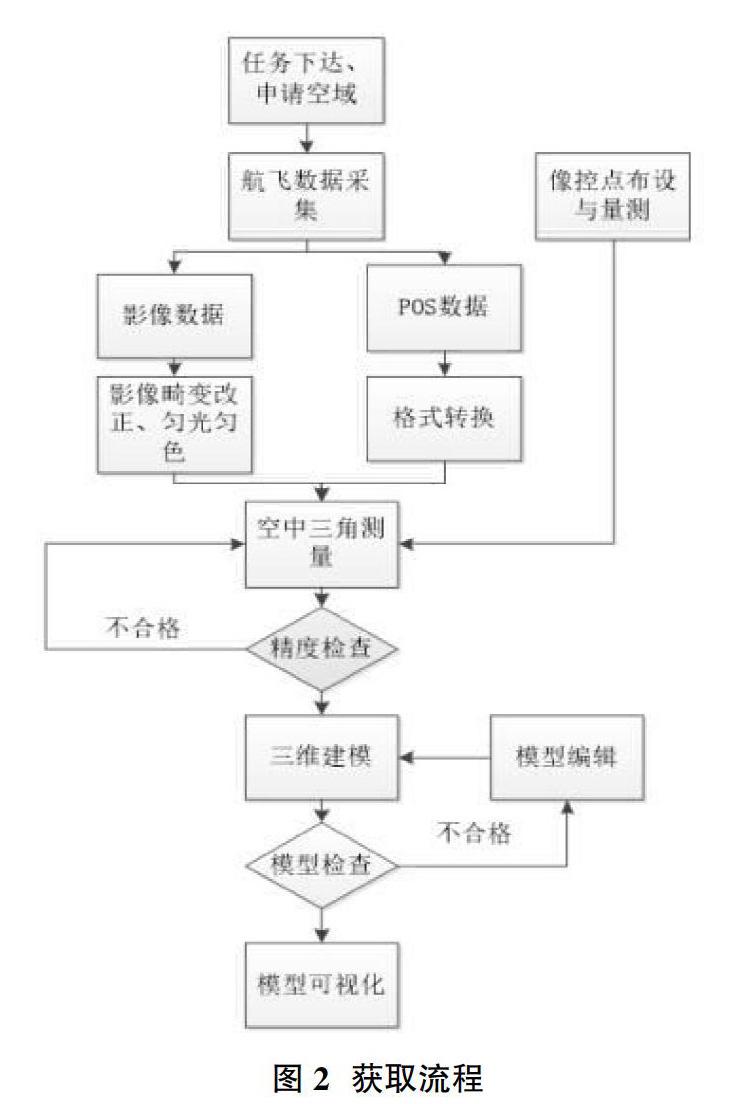
基于消费级无人机倾斜摄影生成三维模型并实现可视化主要包括:航飞数据采集、像控点采集、内业数据处理、生成三维模型和模型可视化几步,具体技术流程见图2所示。
3.2 像控点布设与量测
根据目标区实际情况一共选取布设15了个像控点,其中4个作为控制点,11个作为检查点,像控点布设分布整个测区,均匀可靠,通过连接千寻定位系统采用GPS-RTK的量测方式进行像控点的量测。
3.3 外业航飞
本次实验外业航飞采用大疆精灵4A航摄系统,由于该系统搭载单镜头相机,所以采取在同一块区域,飞五个架次,一个架次获取垂直影像,四个架次获取互成45度的倾斜影像。本试验航飞数据采集把相对航高设计为100m,航向重叠度为80%,旁向重叠度为80%,一共拍摄了900张照片,具体操作步骤如下:
①依次打开遥控器、平板电脑和飞行器,进入DJI GO 4设置好相机参数、刷新返航点和检查内存卡容量等参数。②连接飞控软件,规划飞行区域、设置影像分辨率、航向重叠度和旁向重叠度。③飞前检查通过后,一键起飞,进入作业模式,注意在平板电脑上时刻关注飞行器飞行姿态。 ④完成任务后,拷取航测数据。
3.4 三维模型生产
在航飞结束后,进行软件数据处理,消费级无人机倾斜摄影数据处理主要包括建立工程、空中三角测量和三维模型生产几步。本次数据处理采用ContextCapture软件,该软件操作简单,支持低精度POS数据。
3.4.1 空中三角测量
ContextCapture首先将倾斜摄影得到影像进行连接点自动匹配,对获取的特征点进一步采用多视角匹配技术自动匹配同名点,然后挑点,构建自由网,导入像控点坐标文件,先刺三个点进行光束法区域网平差可以预测出其余像控点的位置,刺上所有像控点后进行再平差,空三结果如图3所示。
3.4.2 三维模型生成
在空三结果达满足精度要求和空三成果模型没有明显分层和错位后,设置好所需要模型的空间参考系统,进行三维模型生产。ContextCapture实景建模大师是基于图形运算单元GPU的快速三维场景运算软件,通过计算可以生成密集点云,根据高密度点云自动生成不规则三角网,根据三角网生成白模,对白模赋予纹理,自动生成带真实纹理的实景三维模型,如图4所示。
3.4.3 模型修复
从图4可知试验区内实景模型效果很好,但是局部区域有一些噪点和漏洞,将有问题区域的模型从ContextCapture中导出来导入到Geomagic软件进行了漏洞修复和噪点删除。除此之外,目标区域内有一条条河流,针对水面匹配连接点困难,导致水面建模效果不好,本文通过水面约束进行了水面建模的修饰,修饰前后如图5、图6所示。
3.5 模型几何精度评定
从模型的平面精度和高程精度这两个方面进行评定模型的几何精度。具体做法为:首先在Acute3D Viewer中将生成的模型打开,用坐标量测工具量测出检核点的三维坐标值。把做像控时量测的检核点坐标看作真实值,然后算取两者的差值并计算中误差,来分别验证三维模型的平面和高程精度。通过统计计算检核点的平面和高程中误差,对获得地三维模型进行几何精度评定。
3.5.1 平面精度分析
3.5.2 高程精度分析
4 实景三维模型可视化
本实验采用Wish3D Earth数据管理平台,加载实景三维模型数据,对模型进行编辑、三维量测与空间分析。
4.1 实景三维模型数据管理
打开网页,登陆自己的账号即可将处理好的实景三维模型数据上传到Wish3D Earth数据管理平台,通过打开浏览器即可实现三维模型数据的展示、编辑与管理等功能。
4.1.1 目標属性标绘
选择点按钮,在场景中点击一个点,完成点标注,打开点标注的属性面板可以添加附属信息以及调整位置。建筑属性办公楼、体育馆和食堂等标注如图7所示。
4.1.2 单体化
对倾斜摄影模型进行对象的单独选中和查询,需要进行模型单体化操作。点击“单体化”按钮,点击创建单体化,在地图上至少点3个点,双击结束创建一个二维矢量面,同时加载获得的二维矢量面与三维模型,把二维矢量面贴到实景三维模型对象表面进行模型数据渲染,然后对矢量面的颜色和透明度进行设置,来实现被选中实体对象的分离,可以赋予属性,可以被查询统计等,如图8所示。进行房屋单体化的同时,将相关的属性数据通过字段录入,属性表如表3所示。
4.2 量测与分析
在实景三维模型上可进行量测与分析,点击工具箱按钮,打开工具面板,可实现目标点坐标查询,距离查询,面积查询,如图9、图10、图11所示。通过工具箱,日照分析工具,选择日期选择播放按钮即可查看一天的日照情况,如图12所示。
5 结束语
本文通过消费级无人机倾斜摄影技术获取小范围实景三维模型,对三维模型进行了水面修复和噪点删除,根据实例总结了基于消费级无人机倾斜摄影生产三维模型的流程,验证了基于消费级无人机倾斜摄影测量生成的三维模型的几何精度,通过网络发布,实现了实景三维模型入库、分析、标注属性和在线浏览功能,在实际生产中有一定的指导意义。
参考文献:
[1]万剑华,王朝,刘善伟,等.消费级无人机的大比例尺测图能力分析[J].测绘通报,2018(6):104-108.
[2]孔振,刘召芹,高云军,等.消费级无人机在大比例尺测图中应用与精度评价[J].测绘工程,2016,25(12):55-60.
[3]徐志豪.消费级无人机倾斜摄影三维建模可行性研究[J].北京测绘,2018,32(8):897-904.
[4]张纯斌,杨盛天,赵长森,等.小型消费级无人机地形数据精度验证[J].遥感学报,2018,22(1):185-195.
[5]孙亮,夏永华.基于无人机倾斜摄影技术测绘大比例尺地形图的可行性研究[J].价值工程,2017(8):209-212.
[6]魏祖帅.倾斜摄影空中三角测量若干关键技术研究[D]. 河南理工大学,2015.
[7]刘波.基于Mobile SDK的无人机自主飞行控制技术研究[D].西安石油大学,2017.
[8]田超.基于无人机的低空数码航摄系统集成研究[D].长安大学,2014.
[9]王志豪,刘萍.无人机航摄系统大比例尺测图试验分析[J].测绘通报,2011(7):18-20.
[10]李德仁,李明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报·信息科学版,2014.
[11]F.Remondino, L.Barazzetti, F.Nex. UAV photogrammetry for mapping and 3D modeling[J]. Remote Sensing and Spatial Information Sciences,2011(22):1-7.
