基于时序的舰空导弹试验靶标数据处理
2019-08-27颜世刚时维科
颜世刚,时维科,卢 鑫
(解放军92941部队,辽宁 葫芦岛125001)
0 引言
在海军舰空导弹设计鉴定试验中,外测靶标航路真值数据的分析处理极为重要,通过对靶标真值数据的分析处理,获取其精确空间位置、加速度等参数数据,作为评估被试武备战技性能、精度的基础和依据。从某种意义上说,外测数据的分析处理水平代表了靶场的试验水平,作为外测数据分析本身,要不断研究新的处理方法,不断提高数据处理的精度和效率。在舰空导弹武器系统试验中,靶标类型多种多样,不论是大飞机类、无人机类还是靶弹类靶标,首先要外测靶标的空间位置、姿态、航路数据,通常采用GPS定位、北斗定位、光测、雷测等技术手段。外测靶标数据率通常与武备内部网数据率不同,且时戳序列点完全不一致,无法对齐。因此,在进行精度误差处理前,首先要对外测靶标真值数据进行基于武备时间序列的插值,通过插值等一系列处理,完成外测真值数据与舰空导弹系统内部报文时序的严格对齐[1],以保证系统数据分析的精度。
1 靶标数据处理基本流程
根据被试舰空导弹系统内部网数据率、时序,把外测靶标数据按照其时序进行处理,达到与舰空导弹系统内部数据时序严格一致,用于系统战技指标、精度的分析与评估[2],处理流程见图1。首先对外测靶标真值数据导入,提取时间序列,然后对异常点进行剔点平滑处理;导入舰空导弹系统内部网数据,提取其时间序列,建立插值点时序矩阵,把靶标数据作为数据源,基于舰空导弹系统内部时序点进行插值处理,然后根据实际需要进行坐标平移和旋转,转换到需要评估的系统设备上。
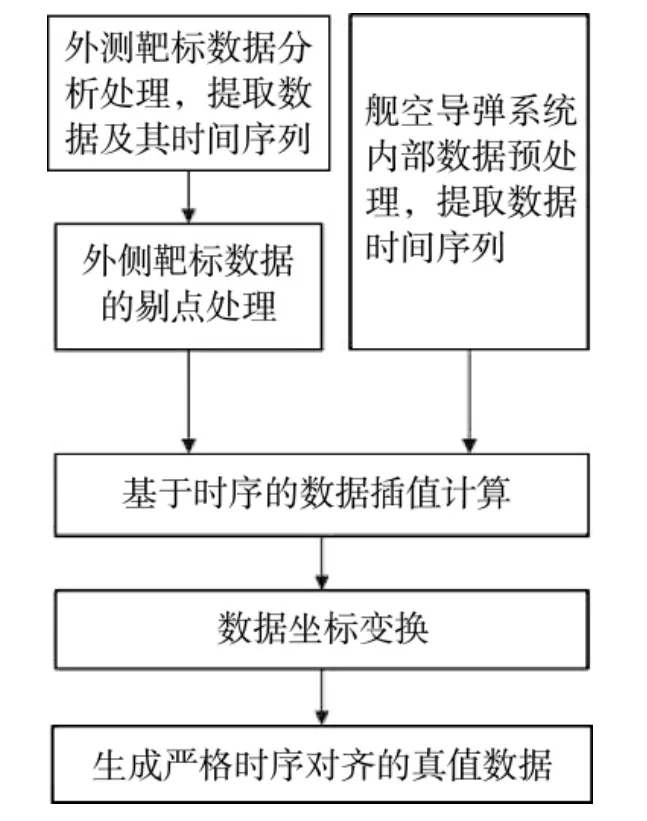
图1 基于时序的靶标数据处理流程图
2 数据预处理及剔点算法
数据预处理包括外测靶标真值数据和舰空导弹系统内网数据的预处理,主要是提取外测靶标的空间坐标、时戳和舰空导弹系统内网数据、时序,并对靶标真值数据进行“异常点”剔点平滑处理。
2.1 数据预处理
导入靶标真值数据包,放入矩阵结构中,提取靶标的空间位置信息和时间序列[3],为北京绝对时,格式为“时:分:秒.毫秒(t:min:s.ms)”;导入舰空导弹系统试验内网数据包,提取时序信息,时间北京绝对时,单位格式“s”。
2.2 靶标真值数据剔点处理
由于原始外测靶标真值数据中可能存在个别大随机误差或疏失误差的野值,这是数据录取的异常或其他意外干扰造成的,酌情对“奇异点”进行剔除、平滑处理。剔点处理方法有四点外推法,直观法、一阶多项式平滑法、一阶多项式平滑的残差平方法等[4-5]。由于靶标数据采样时间序列是等间隔的,故采用比较快捷简单的四点外推法进行应用分析。
2.2.1四点外推模型公式
首先判断要处理的数据序列前四点数据的合理性,然后从第5点开始,由前四点数据,用最小二乘法进行线性外推,剔除奇异点。公式如下:

其中,Xie为第i点的外推值;Xi-1为第i-1点的实际值;Xi-2为第i-2点的实际值;Xi-4为第i-4点的实际值。
2.2.2四点外推模型使用原则
1)四点外推法公式,仅适用于时间序列是等间隔的情况。
2)当Xi被接受时,继续外推下一点。
3)当Xi被剔除时,记录并输出剔点位置,对于剔除的Xi采用第3节的插值方法补齐;下面的4个点不再进行剔点处理,直接保留,从第5个点开始,重新剔点。
4)发生3个以上的连续剔点时,必须检查原始数据,检查是否有连续的剔点误差,采取相应的措施对原始数据进行更改,防止歪曲航路。
5)剔点标准δ的选取。δ取值过小,可能造成连续剔点,歪曲航路;δ取值过大,个别“奇异点”又不能被剔除,造成真值数据的大误差,一般δ选择:

其中,σ为GPS真值观测设备精度误差。
3 插值算法
插值算法常用的有拉格朗日插值、Newton插值等,拉格朗日插值和Newton插值在实际的数据处理中有着广泛的应用[6-10],下面对二者在基于时间序列的离散数据插值中的应用作进一步分析。
3.1 基于时间序列的拉格朗日插值算法

其中,每个lj(t)为拉格朗日基本多项式(或称插值基函数),其表达式为:
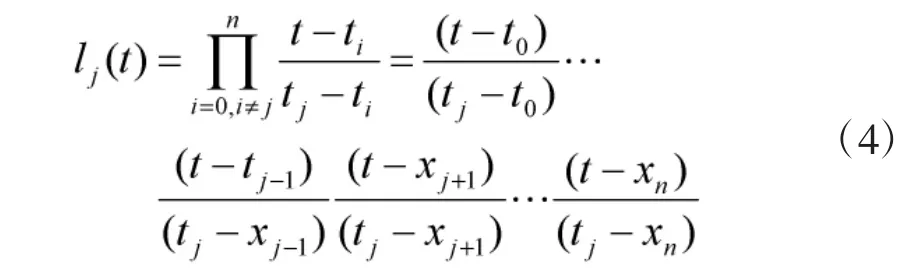
拉格朗日(Lagrange)插值主要应用于对内插值的计算,优点在于公式结构整齐紧凑,在理论分析中十分方便,计算的采样点处的值不会改变;缺点在于当插值点增加或减少一个时,所对应的基本多项式就需要全部重新计算,于是整个公式都会变化,当插值点比较多的时候,拉格朗日插值多项式的次数可能会很高,因此,具体数值有不稳定的特点,也就是说尽管在已知的几个点取到给定的数值,但在附近却会和“实际上”的值之间有很大的偏差。这类现象也被称为龙格现象[11-14],解决的办法是分段用较低次数的插值多项式。
3.2 基于时间序列的Newton插值算法
Newton插值多项式可表示为:

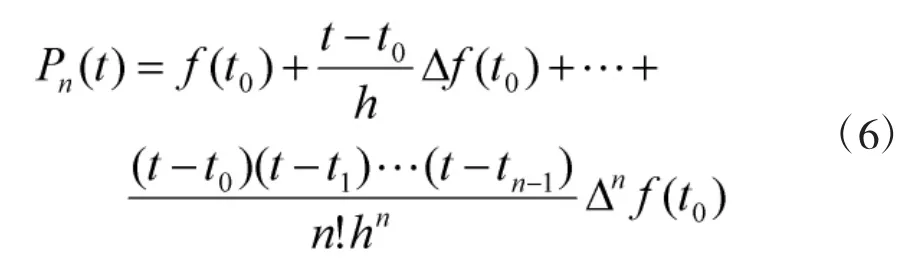

可用式(7)构造插值多项式和差分表,用式(8)做插值。牛顿插值具有公式形式简单,便于计算的优点,而且增加新点之后,不用导致之前的重新计算[14]。
4 坐标变换
坐标变换通常包括坐标系平移和坐标系旋转。在实际数据处理中,经常要把数据从一个设备位置点变换到另一设备位置点,而两设备坐标原点和坐标轴指向都不相同[15]。
4.1 坐标平移
4.2 坐标系旋转
5 实例应用分析
5.1 数据及时序提取分析
在某型舰空导弹武器对空动态校飞试验中,目标靶机加装GPS,数据率为20 Hz,通过数据的预处理,选取GPS测量值中连续16个数据点作为研究样本,详见下页表1,其中时间序列为北京时间绝对时,格式为“时:分:秒.毫秒(t:min:s.ms)”;被试某型舰空导弹武器系统内网数据率为25 Hz,时间序列为北京时间绝对时,单位格式“s”,选取连续4个数据点的时间序列作为样本点,详见表2。
5.2 数据的剔点处理
按照2.2节四点外推剔点算法,GPS观测设备精度σ选择0.30 m,根据式(2)得δ=1.273 m;对表1数据进行异常点检查。下面以5号点Z坐标数据示例说明检测剔点过程。

根据式(1)有:

则:
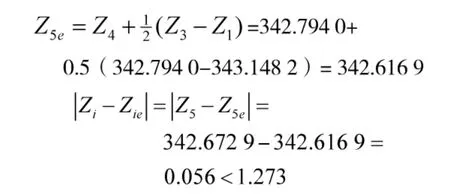
其中,Z5坐标满足条件,接受保留,其他点数据检测处理类似。
5.3 数据插值
在插值计算时,可根据实际情况选择采用拉格朗日插值算法还是采用牛顿插值算法,在导弹试验数据的处理中,因为试验数据插值时间序列是等间距的,一般采用牛顿插值法。
5.3.1拉格朗日算法插值
如果直接用拉格朗日插值模型,由于实际处理的数据多达上万点,拉格朗日插值多项式的次数不可控,插值数据出现龙格现象。为避免龙格现象,采用数据中心低阶分段插值的方式,对于空中机动靶标,极短时间内插值点与其前后等距离数据点状态的关联性几乎是均等的,在插值点前200 ms和后200 ms以内,靶标在理论上不会出现极端的运动变化。因此,选择插值点前后各4个点,共8个数据点作为一次插值区段。例如,为完成表2中1号点插值,选取表1中5~12号点作为插值区段进行计算,其他点插值区间类似选取,计算时首先把GPS真值的北京时间的绝对时戳转换为以秒为单位的量纲形式,再进行相应的计算,通过MATLAB的仿真计算得出插值结果如下页表3。
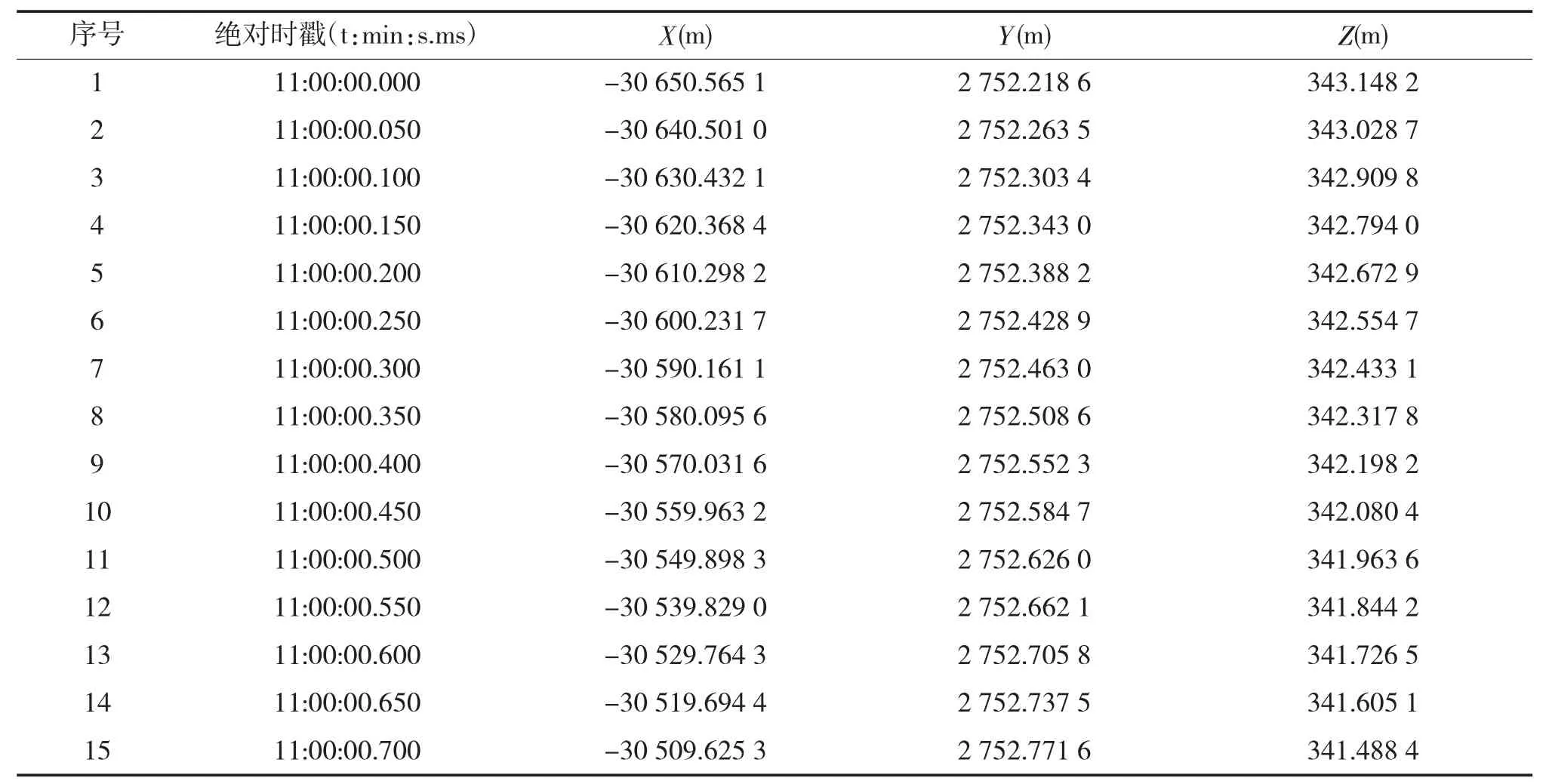
表1 靶标GPS真值数据
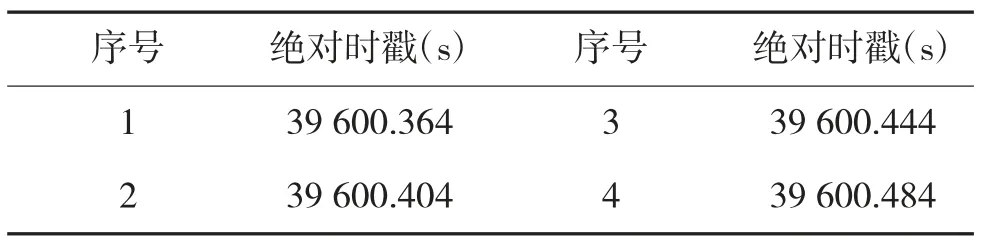
表2 某型导弹系统内网数据时间序列
5.3.2 Newton算法插值
根据Newton前向插值模型算法式(7)、式(8),使用表1、表2数据通过MatLab仿真计算得出插值结果,如表4所示。
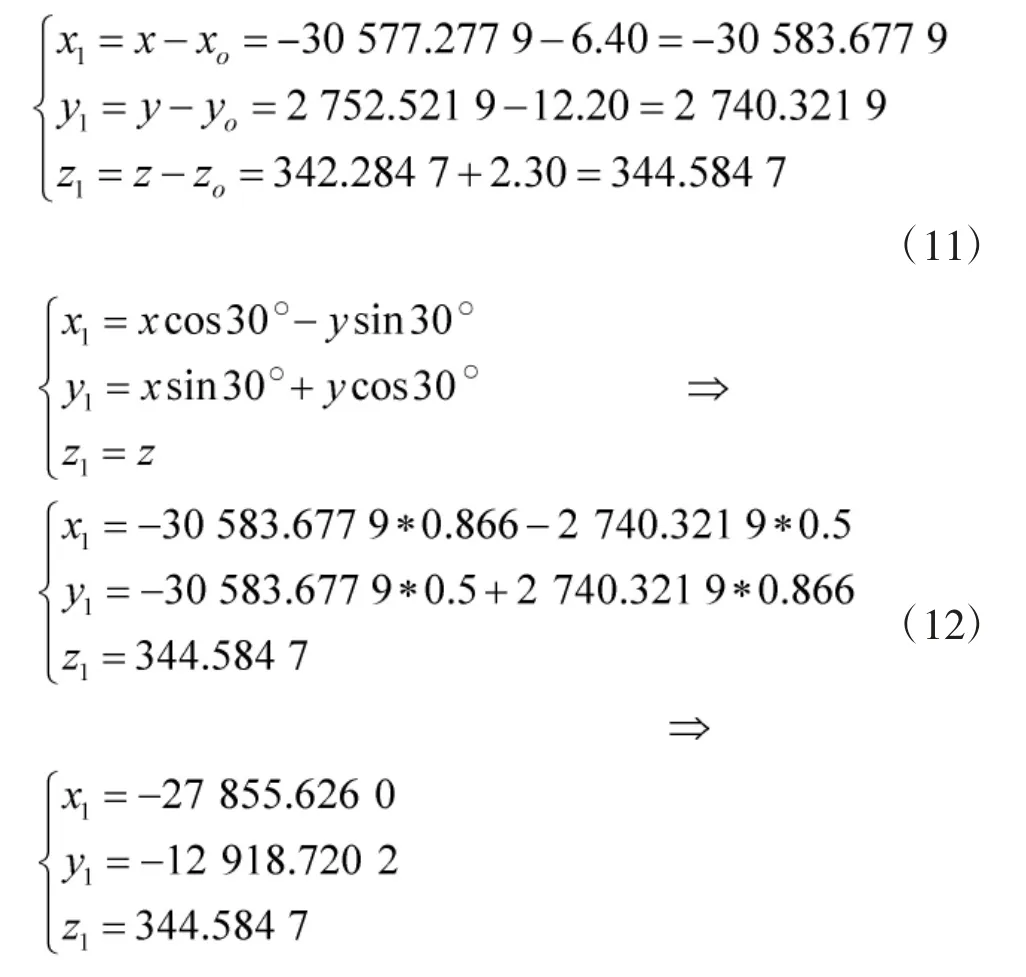
5.4 坐标的转换

表3 拉格朗日插值结果表

表4 Newton插值结果表
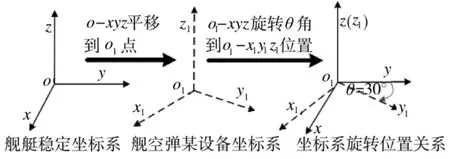
图2 坐标变换关系图
6 结论
在舰空导弹武器系统试验鉴定中,数据分析的首要任务是对外测靶标真值数据的分析处理,对于靶标数据和武器系统内部数据有一个显著的特点是数据全部基于时间序列,但二者数据率和时序完全不一致;外测靶标真值数据处理的目的是转为严格对应武备系统内部时序的真值序列,为后续的系统精度、战技指标的分析处理奠定基础。本文系统分析了四点外推剔点算法、拉格朗日及牛顿插值算法、坐标转换算法的实际应用,深入研究了基于时间序列的外测靶标真值数据处理分析的方法流程,并给出了在某型舰空导弹试验中的具体应用实例。本文研究的内容方法,在舰空导弹试验中有着成熟的应用,此方法对于其他武器装备试验数据分析处理有着极强的借鉴意义和应用价值。