水下航行器轴向运动的初始修正自适应反演控制方法*
2019-08-27余有芳严求真蔡建平
余有芳,严求真,蔡建平
(1.浙江商业职业技术学院应用工程学院,杭州310053;2.浙江水利水电学院信息工程学院,杭州310018;3.浙江水利水电学院电气工程学院,杭州310018)
0 引言
作为一种水下机器人,自主水下航行器如今已应用于科学研究、企业民用和军事等领域,执行着诸如深海勘探开发、水文数据采集、水下搜救、海战侦察攻击等任务[1-2]。随着自主水下航行器应用范围的不断扩大,水下航行器轴向控制问题,引起了人们的关注[3]。研究航行器轴向运动精确控制方法,实现对参考信号的精确跟踪,有助于自主水下航行器高质量地完成侦察、水下测量和目标跟踪等任务,因而是一项有意义的工作。
自主水下航行器往往在复杂的水下环境中航行,要对其进行精确建模是一件困难的工作。针对自主水下航行器的控制方法研究可追溯到20世纪90年代初,早期的结果多为PID控制方法[4]。本世纪以来,人们着手探讨水下航行器的先进控制方法。Smallwood等研究忽略海流影响情形下的自主水下航行器自适应控制方法[5]。在文献[6]中,Riedel为水下航行器设计滑模变结构控制器,但没有进行稳定性分析。Gao等研究水下航行器在受海流影响情形下的轴向运动轨迹跟踪问题,给出了自适应反演滑模控制器设计和自适应积分反演控制器设计两种方案[7-8]。
水下航行器在执行跟踪任务时,航行器的起始位置常常不在参考轨迹的起点。当航行器的质量和初始误差均较大时,在执行跟踪任务的起始时间段内,采用常规控制方法实现跟踪任务需要航行器系统能够提供较大的输出动力。这一期望输出动力有时甚至超过航行器动力系统的最大输出,导致理论算法在具体实施时无法获得较好的收敛结果。因此,改善或缓解这一矛盾,是一件有意义的工作,是开展本文所述研究工作的动机。
本文研究水下航行器的自适应反演控制方法,主要工作与创新之处在于:1)利用传统自适应反演控制方法为自主水下航行器设计控制器,并进行分析;2)为了克服传统自适应控制算法在实施时,由于航行器质量和初始误差较大所导致的期望输出推力过大现象,本文在给出修正信号构造方法的基础上,提出初始修正自适应反演控制方法,对此予以改善。
1 问题的提出
考虑解耦后的水下航行器的轴向运动模型

式中,x和u分别表示水下航行器的轴向位移和相对海流的前进速度,c为未知的常值海流速度,m和mu分别为航行器本身的质量和流体附加质量,Cuu为流体二次阻尼系数,Ft为航行器系统的推力,Fd代表外部常值扰动,m、mu和Cuu均为未知的正常数,m-mu>0。
2 无初始修正的自适应反演控制




由于

故
基于式(7),为系统式(2)设计控制律

及自适应律

闭环系统具有的性质可以总结为如下定理:
定理1将控制律式(8)及自适应律式(9)施加于水下航行器轴向运动系统式(2),可实现位置跟踪误差渐近收敛于零,并确保闭环系统所有信号有界。
证明选择Lyapunov函数


将式(8)和式(9)代入式(11),可得

由式(12)可见,


对式(12)的两边积分,有

根据Lyapunov函数的非负性,由上式可以推出

上文给出的控制设计方案中,利用自适应方法估计未知常数,可以实现跟踪误差渐近收敛至零。在输入增益较小(即航行器本身质量较大)场合,且初始误差较大场合,利用上文给出的控制方法设计控制器,往往需要较大的控制输入,有时可能超过实际系统的最大输出动力(本文将在数值仿真部分展示这一点)。针对这一问题,下一节对本节提出的算法进行改进。
3 初始修正自适应反演控制
3.1 修正参考信号的构造
借鉴文献[9-11],利用待定系数法,构造曲线

可以看出,这些曲线具有如下性质:
3.2 控制器设计
类似于上一节的式(8)和式(9),分别设计控制律及自适应律为

及

将控制器式(13)作用于系统式(2),具有如下性质:

证明 与定理1的证明相类似,对Lyapunov函数
求关于时间的导数,即可得证。此处限于篇幅,略去详细步骤。
在本节给出的设计方法中,将原有的系统输出对参考信号的跟踪转化为系统输出对修正参考信号的跟踪。这样,原设计方案中可能出现的期望控制输入量过大现象得到了改善。
4 仿真算例

2)为了改善控制量过大的情况,采用饱和方法,将推力限幅在-10 KN到10 KN之间,其余仿真参数取值同前。仿真时长80 s,相应结果见图3和图4。从图3可见,航行器无法对参考轨迹进行渐近跟踪,从头至尾,一直存在较大的跟踪误差,且误差没有收敛;由图4可见,控制量即推力的颤振情况非常严重。
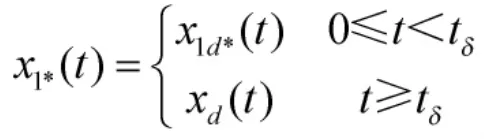
3)采用控制器式(13)进行仿真,tδ=5,其余仿真参数取值同1),仿真时长30 s,相应仿真结果见图5和下页图6。可以看出,将取得较好的跟踪效果,表现在:由图5可见,当t≥tδ时,航行器可以对参考信号进行精确跟踪;其次,需要的控制量即推力也较小,对比图6、图2和图4,可以看出,采用初始修正自适应反演控制的控制量较非初始修正自适应反演控制的控制量小,且不会出现颤振现象。
图1 非初始修正控制下的位置跟踪
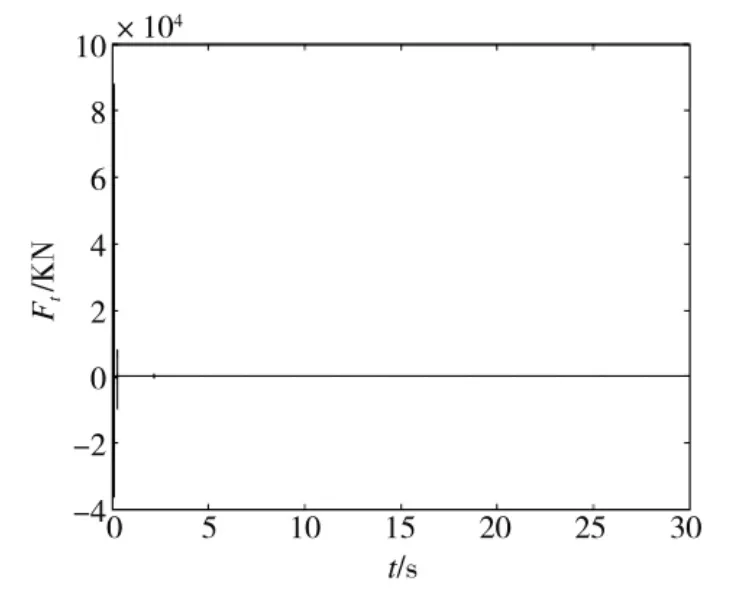
图2 非初始修正控制下的推力
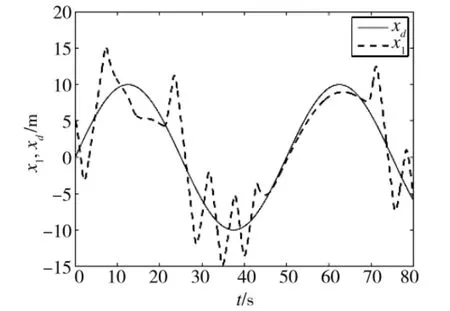
图3 非初始修正控制下的位置跟踪(有输入限幅)
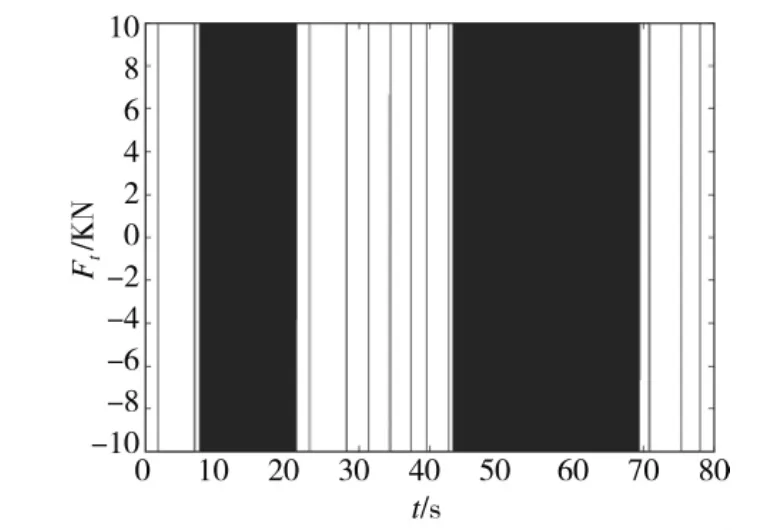
图4 非初始修正控制下的推力(有输入限幅)
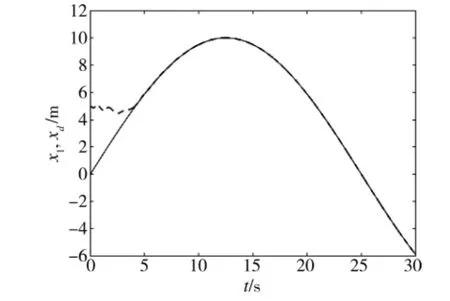
图5 初始修正控制下的位置跟踪
仿真对比结果表明,对于质量较大且初始误差也较大的水下航行器,采用本文提出的初始修正自适应反演控制方法,可以显著地降低实施跟踪任务所需的期望输出动力。
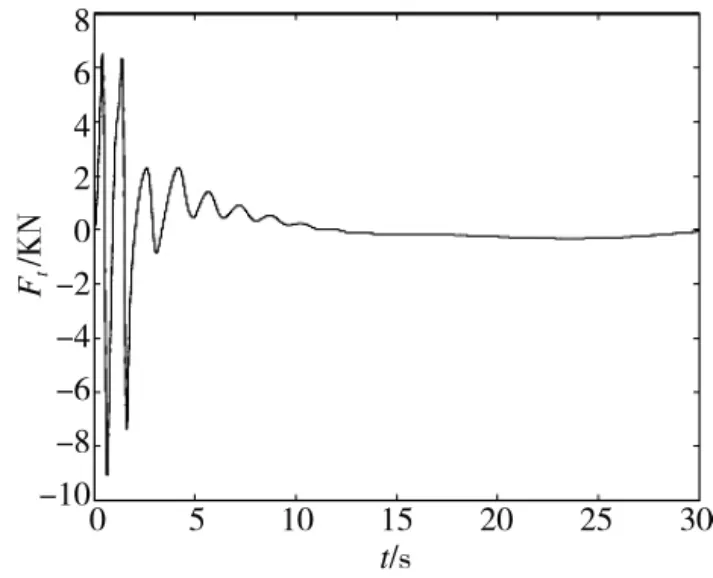
图6 初始修正控制下的推力
5 结论
本文研究水下航行器的自适应控制方法,首先根据传统的自适应反演控制方法,为航行器系统设计控制器,该方法在执行跟踪任务的起始阶段,可能出现控制器所期望的推力(控制量)超过实际动力系统所能提供的最大推力现象。为改善这一矛盾,本文对前述方法进行改进,提出初始修正自适应反演控制设计方法。仿真结果表明,该方法可以缓解传统自适应反演控制设计方法在实施时所需的控制量过大现象,并取得较好的跟踪性能。