基于模糊随机贝叶斯网络的意图估计方法
2019-08-27范瀚阳高睿源金兴华
范瀚阳,高睿源,金兴华
(中国电子科技集团第二十八研究所,南京210007)
0 引言
随着信息化战争的发展,认知域的对抗成为决定战争走向的核心和关键[1],而意图估计正是现代作战指挥决策的核心技术之一。意图估计(Intention estimation)是数据融合JDL五级模型中的二级融合[2-3],即态势评估的重要功能之一。意图估计是通过对各传感器的信息指标进行融合推理,得到敌方的作战企图和打算,辅助指挥员进行战场决策,在局部战争、反恐和国家安全维护等领域均有应用。影响意图估计[4-5]结果的因素很多:航速、目标身份、高程等。抛开雷达噪声以及测量误差的影响,这些指标本身也具有很大的不确定性,如目标的航速时快时慢,对于武器强弱的情报更是模糊易变,随着这些时刻跳变的战场信息不断输入到分析系统中,一系列变化的估计结果也在不断输出,而只有稳定的估计结果才对辅助决策具有意义。
匹配滤波、模板及图解等方法是目前比较成熟的意图推理方法。文献[6]运用贝叶斯网络的方法对空中目标的意图进行推理,将敌方飞机的大小、航速等指标看作随机模型,但无法对飞机的火力大小、身份信息等主观指标进行描述;文献[7]则引入了模糊贝叶斯网络,重点对目标的各项指标进行模糊化,进而确定结点并推理,但无法推理具有随机性的战场因素。
1 意图估计及要素
1.1 战场目标意图估计要素
战场目标总是通过一系列的行为完成其预设的战斗意图,例如侦察机通过在某些指定区域上方的盘旋飞行,完成其侦察意图;坦克等装甲车通过向目标区域行进,执行攻击作战。因此,对目标进行意图分析,即是通过对能够反映目标作战企图的各项因素的收集及融合推理的过程。而反映目标意图的战场因素繁杂,且不同场景下需考虑的因素差异性也很大,需依据具体场景参照历史数据并咨询专家进行确定,故本节重点在于各项因素的描述及推理。依据机会理论[8-9],可以将战场因素按照随机性和模糊性进行划分。随机性即客观的不确定性,目标航速、高程等实测数据,由于噪声误差等影响呈现一定的概率分布;模糊性表征的是主观的不确定性,例如来袭敌目标的规模大小、所携带武器的强弱信息等。因此,本节研究了将战场两种不确定性统一的模型,即混合模型进行结点构造,是使用模糊随机贝叶斯网络进行推理的基础。
1.2 混合事件与模糊概率
本节引入混合事件对战场目标的各项指标进行描述。

若样本空间X为Rm连续的空间:

至此,可使用公式将各战场因素构造为模糊随机结点;而对于现有的一些战场因素,若认为只含有模糊性或随机性,如目标的身份信息只用攻击机、侦察机和轰炸机这样的随机模型进行分类,可看作混合事件的一种退化描述,依然可以用作模糊随机贝叶斯网络的结点,进行推理。下面以距离结点为例,给出结点构造方法示例:
距离信息对于判断敌方目标意图起着重要的作用,不论是空战、海战还是陆战场景甚至是空天作战,敌我距离都是需要参考的重要因素。这里,由于不同场景下距离远近的判断门限不同,因此,主要考虑敌我距离的变化对目标意图估计的影响。那么,分别考虑当目标距离我方越来越近、越来越远,以及敌我距离远近不断变化情况。因此,构建模糊随机贝叶斯网络的距离结点时,分为(逐渐远离,忽远忽近,逐渐靠近)3个子结点进行描述,分别对应3个模糊子集,使用模糊变量描述。对于敌我距离的远近变化,定义一个新的变量进行表征,即距离变化率:

其隶属度函数u(x)如表1所示:
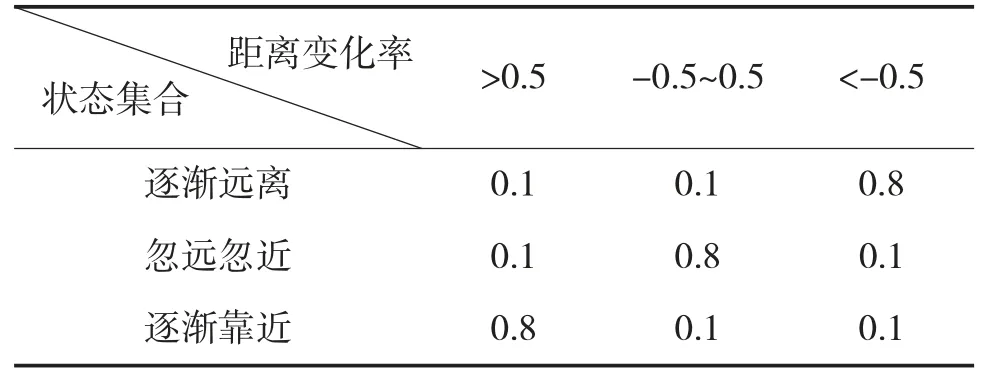
表1 距离变化率隶属度表
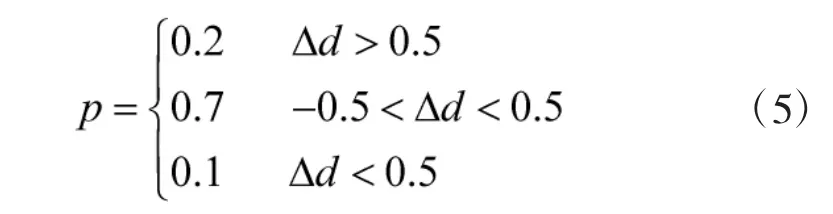
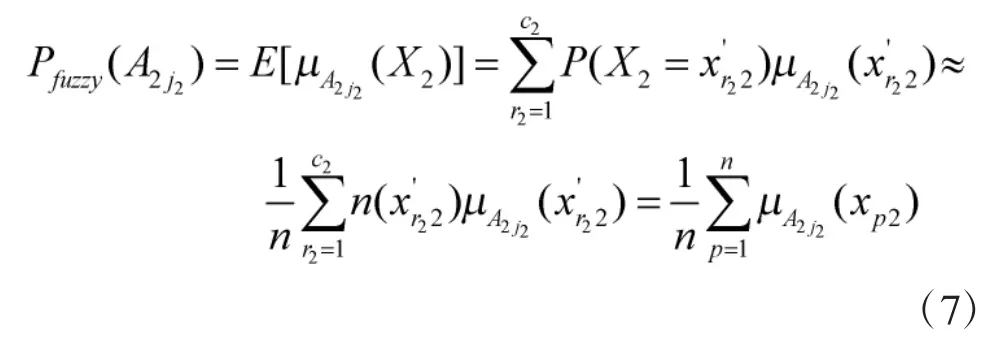
最终,引入距离变化率的模糊概率描述。由于测量误差及噪声等影响,得到的目标位置信息呈现概率分布p(x),则其最终模糊概率可由式(5)得到。例如当目标信息检测值换算为距离变化率时:
2 模糊随机贝叶斯网络
2.1 结点推理
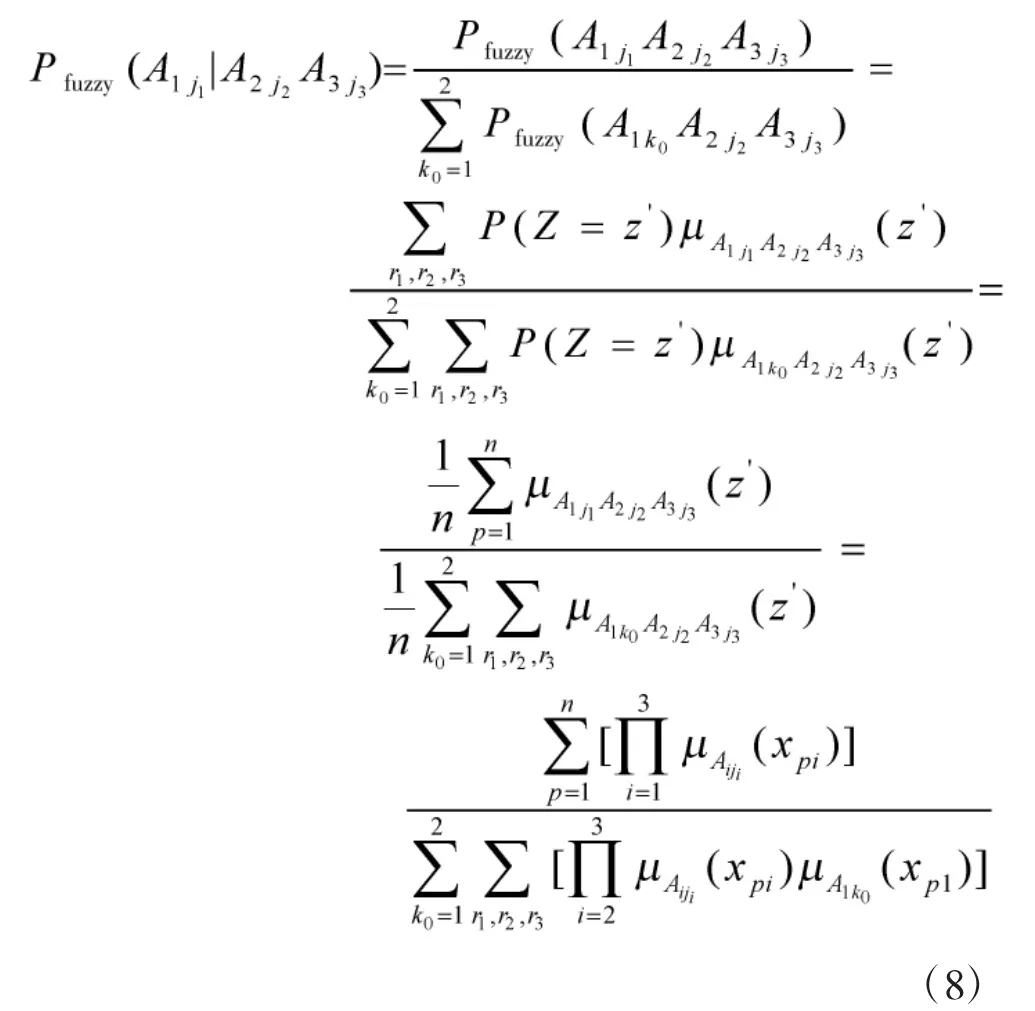
为构造能够推理混合事件的贝叶斯网络[10-11],除了需要在对网络的结点进行改造,同时还需要扩展网络的推理方法,因为贝叶斯网络的概率推理显然无法满足混合事件的不确定性推理。由于多个结点的复杂情况都可以归类简化为3个结点的扩展,因此,仅给出简单情况的推理过程作为示例。
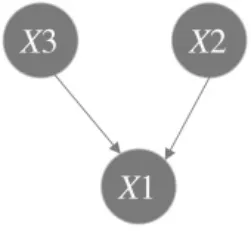
图1 网络结点推理示意图





那么,当网络的结构确定后,就可以根据上述公式分别确定叶子结点的模糊先验概率,以及各结点间的条件模糊概率。而进行网络推理时,由于使用贝叶斯网络的结构,即使只获得部分叶子结点的数值,依然可以推动网络进行推理,得到结果。并且虽然该方法在可能性领域将结点由随机模型推广到混合模型,增大了各结点先验概率,以及结点间条件模糊概率的计算复杂度及量级,但是大部分的计算耗费在网络构造训练阶段,实际使用时推理进行意图分析的过程计算量并不大,因此,仍然可以实时快速地输出意图推理结果。
2.2 网络结点及结构
虽然意图估计的主要研究内容是敌方目标的态势,但敌我关系以及环境特性也是考量的重要指标。不同场景下,目标指标的重要程度不同,例如平原地区考察地面目标的意图时,目标的高度变化甚小,对其意图估计结果影响很小,可忽略不计。而同样的指标在不同场景下的模糊描述阈值也不同,如对于地面目标,当其时速达到100 km/h,可认为隶属于速度快的范畴,与攻击意图耦合较紧;而如果是空中目标,这样的速度则隶属于速度慢的范畴,与侦察意图更贴合。因此,不同场景目标,应当对应不同的网络结点及不同的网络结构。
以空中目标为例,需要考虑的目标指标很多:首先是目标的高度信息,轰炸机在到达作战区域后,其总是在一定的高度释放炸弹;其次目标的高度变化信息也是重要的指标,战斗机进行作战时往往先拉升一定高度占据太阳的方位,再进行俯冲,此时目标的高度就会呈现一定的规律性,而侦察机进行侦察任务时,往往在固定高度盘旋;目标在雷达照射下的RCS信息表征了目标的大小,如其该项指标更接近无人机大小,则其执行轰炸任务的意图几乎为零。因此,咨询空战领域专家并结合历史数据资料,总结出空中目标的意图估计主要考虑的因素包括:目标的速度、目标滞后角、目标大小(RCS)、机动特性及敌我距离等,具体如图2所示。将这些基本的影响因素作模糊划分,再根据其测定值的概率描述,根据式(1)~式(3)描述为混合变量,即可确定网络叶子结点。限于篇幅不给出具体数值,确定方法参见1.2节距离因素的模糊随机描述示例。
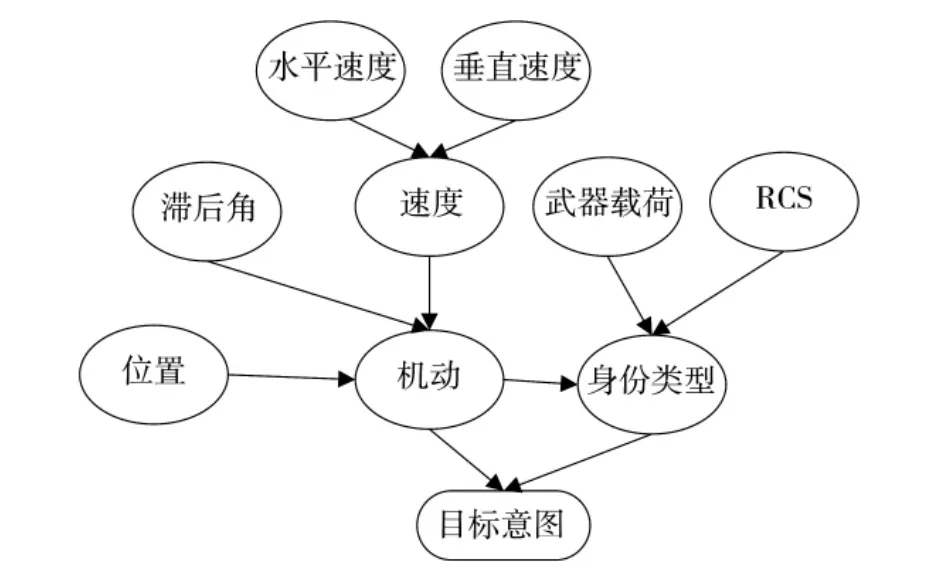
图2 模糊随机贝叶斯网络结构图
本文设计的简单空战场景模糊随机贝叶斯网络拓扑图如图2所示。贝叶斯网络[12]的拓扑结构的确定往往使用海量数据的测试样本,结合智能算法进行多次迭代得到。这里考虑到战场环境的特异性,历史数据较少,复现性低,而作战装备的更新快,因此,难以获得同装备场景下充分的历史数据用于网络训练与构建。故采用过往数据与咨询领域专家相结合的方法,参考了文献[13-15]等,给出了初始拓扑关系,并在咨询相关专家后,进行了调整,如增加了RCS结点以及调整了结点间关系等,最终形成了图2所示的网络拓扑图。
依据现有的少量过往真实数据,利用重点实验室现有模拟器,给定意图进行场景模拟,记录场景下各指标数据作为样本数据进行训练,进而得到训练成熟的网络,如表2所示。这里限于篇幅,仅给出部分样本数据作为示例。
这样,随着场景不断深入,各传感器不断得到目标的各项指标信息,将其分别转换即计算其各结点模糊先验概率,输入到图2所示的网络中,即可推理得到一系列目标在不同时段的意图输出。
3 仿真分析
为验证模糊随机贝叶斯网络进行意图估计的有效性及稳定性,本文根据文献的研究结果,结合专家的指导,在Matlab平台下,利用贝叶斯网络工具箱(Bayesian Network Toolbox,BNT)为基础,建立了目标意图模糊随机贝叶斯网络模型,并结合多种场景进行了验证,这里给出一个场景作为示例。
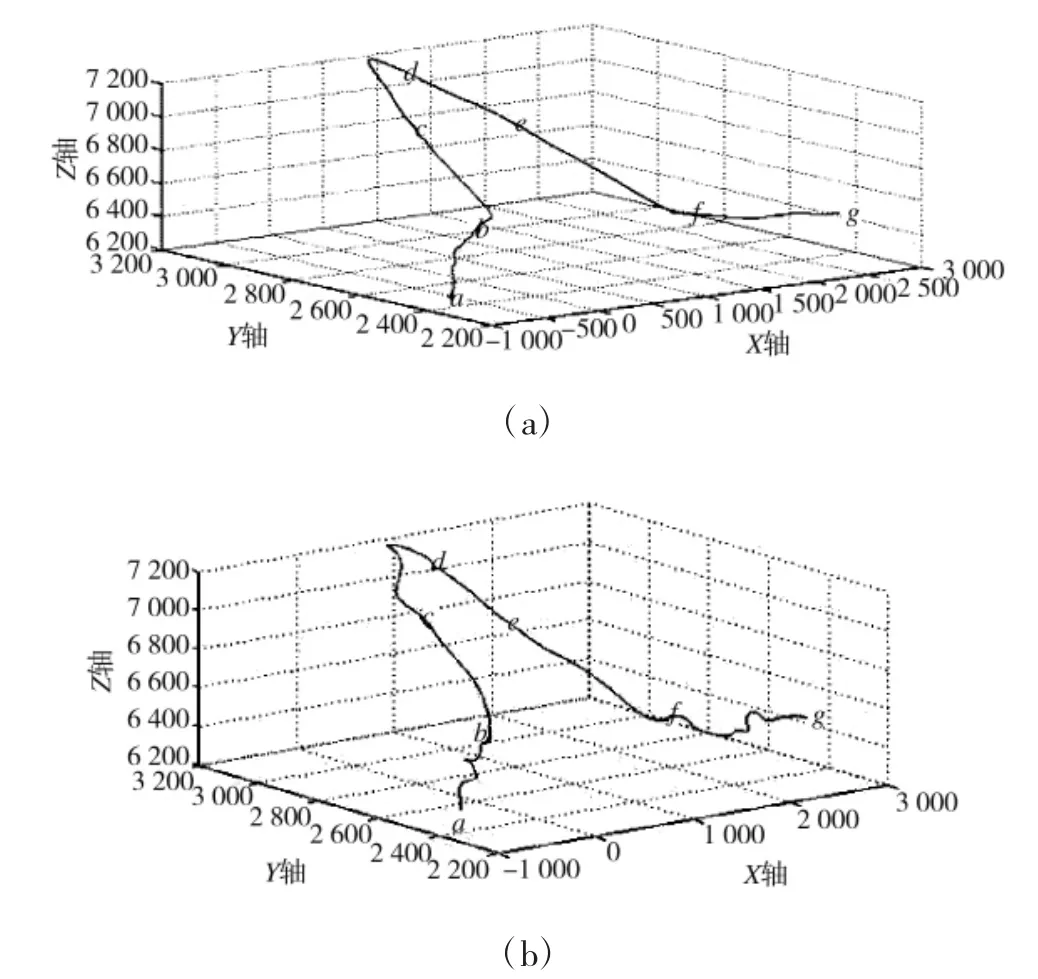
图3 战场想定示意图
如图3(a)所示,假设我方有基地A和基地B分别在(6 000,1 000,0)和(7 000,5 000,0)位置,考虑敌方有一批空中目标向我方靠近,作攻击态势并作出相应机动隐藏意图:
1)0 s~9 s,目标在6 000 m高度向我方匀速飞来;
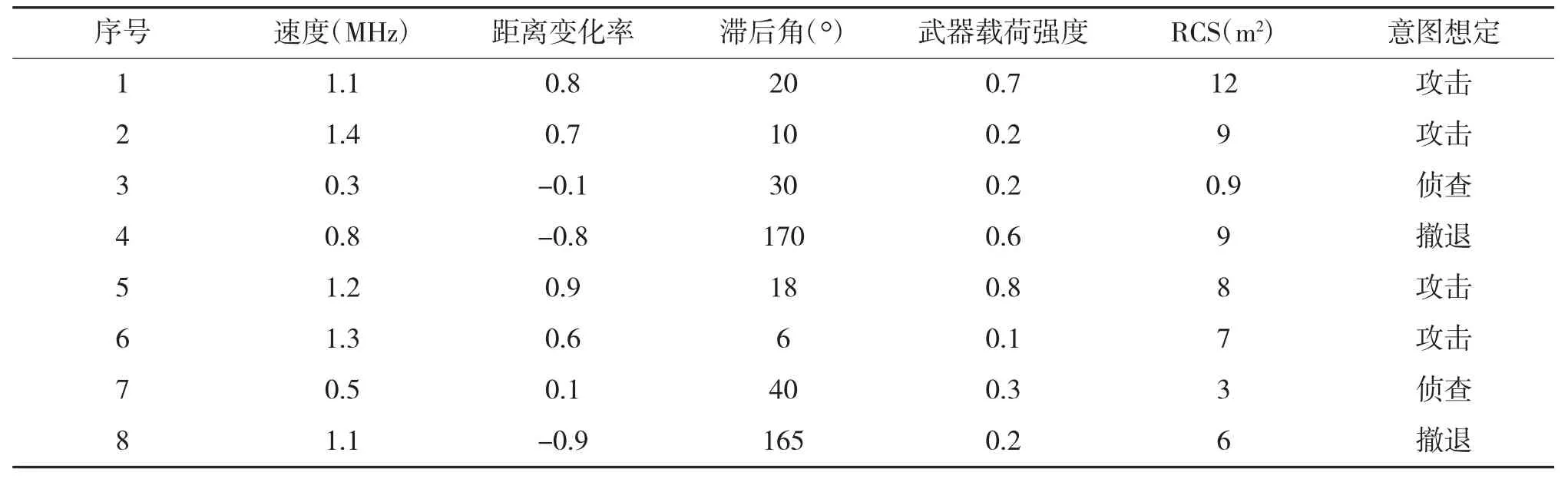
表2 距离变化率隶属度表
2)9 s~30 s,目标为躲避我方巡航机作迷惑性机动,向左上方紧急机动;
3)30 s~45 s,目标回到正常航行高度,向我方继续移动,作攻击态势;
为模拟真实的测量误差及噪声影响,对目标的轨迹加上随机噪声作为测试样本,如图3(b)所示。验证使用2.2节所述的模糊随机贝叶斯网络进行推理,得到的目标意图估计结果如图4所示。
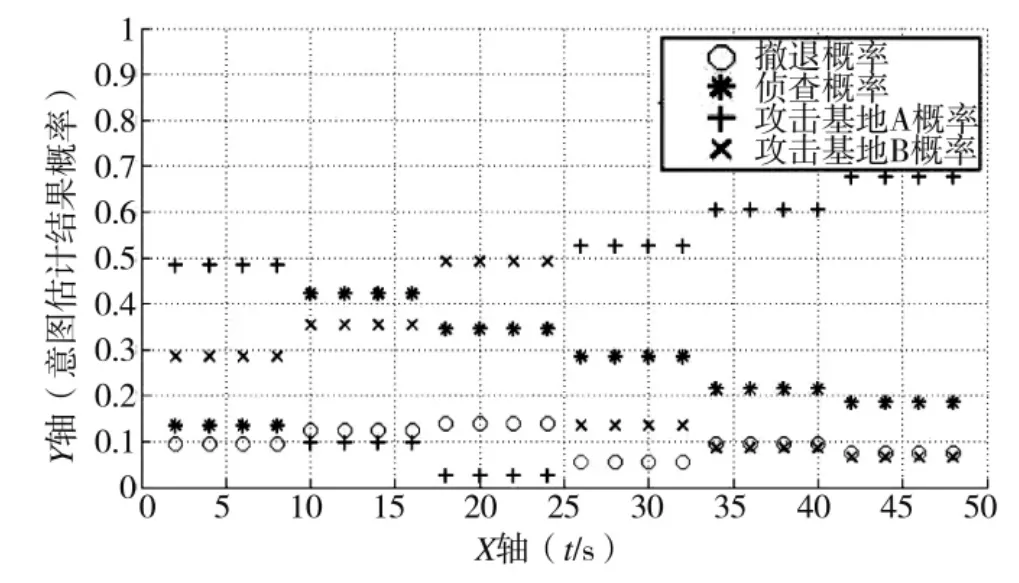
图4 目标意图估计仿真结果图
由图4可见,在多个观测点,本文算法均能作出准确有效的意图估计,而在b-c-d航段,由于目标观测轨迹较短且目标当前机动未完成,故作出攻击基地B及侦察的预测,也符合其当时态势趋势;而当目标意图清晰后,在航迹的d-e-f段,亦即目标欺骗性机动的后半段,本算法即能作出正确稳定的意图估计。
为验证本文算法在稳健性方面的优势,以图3战场想定为基础,图2所示各结点及其关系为基础,构造简单贝叶斯网络进行推理,其结点只具有随机性。如考虑距离指标时,仅将目标实时距离作为输入。最终得到的针对图3场景的估计结果如表3所示:
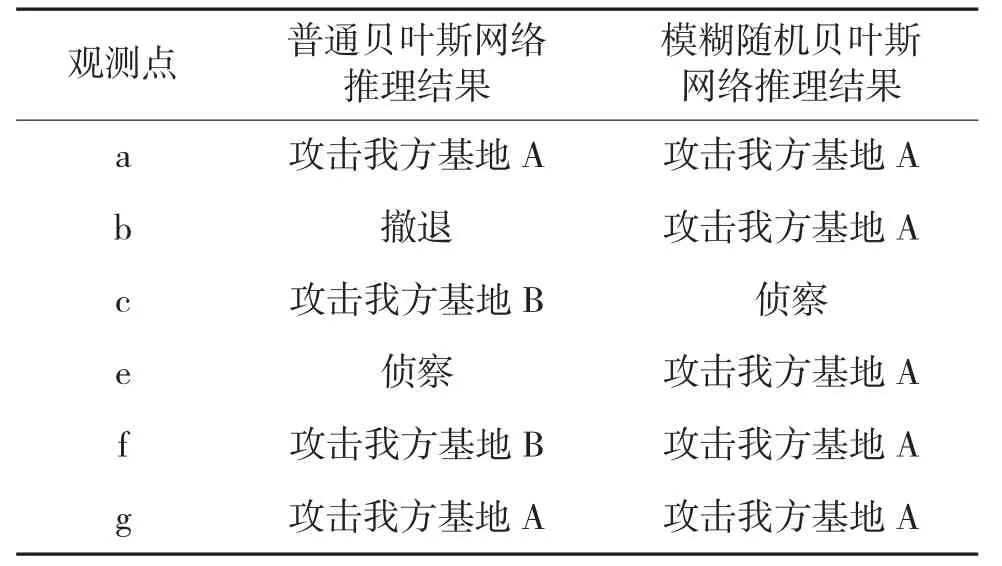
表3 意图估计结果比较表
从表中可见,普通的贝叶斯网络输出结果是不断变化的,无法采用。并且在该小型场景的尾期,目标的欺骗性机动已经完结,意图明显,该方法的输出结果仍在跳变,甚至作出错误的目标意图估计。
这是因为普通的贝叶斯网络使用简单的随机模型进行推理,对于战场的模糊变量难以描述。当获得一个指标观测值需要输入网络时,使用硬性门限进行判决,当某一指标接近门限值时,则易被归入错误的分类,导致推理出现巨大误差。而模糊随机贝叶斯网络使用的混合事件模型,规避了这一问题;同时,并未使用模糊随机变量的形式,还使得观测误差及噪声造成意图结果波动,如在航迹f-g段,目标的欺骗机动已完成,攻击基地A的意图明显,但是受到噪声的影响,使得目标的实时航向及速度等即时信息发生波动,从而造成普通贝叶斯网络的意图估计结果产生偏差,且在多个意图估计结果间跳变,并不稳定。
为验证本文算法,通过增加敌我目标个数、增加我方空中目标,以及各目标间距离分布等方法构造了不同场景,在类似场景下修改目标速度、高程等指标的方法,进行了多次实验验证。综合结果表明,当目标的意图稳定后,本文算法均能给出类似上例的稳定正确的意图估计结果。综上所述,本文算法既能弱化噪声的影响,又能够完备地描述战场各因素,随着战场信息逐步输入,输出稳健的推理结果。
4 结论
有效稳健的意图估计结果能够作为辅助决策的参考,本文研究了利用模糊随机贝叶斯网络的方法提高意图估计,并通过空战场景的仿真,对该方法进行了验证。本文方法通过定义描述战场因素的混合事件模型,构造网络结点,进而推理输出的目标作战企图估计结果在稳健性方面有很大优势,提高了意图推理结果在实际辅助决策过程中的可参考性。