阿克曼式电子差速PID智能车转向控制方法研究
2019-08-13周燕军沈旭东
周燕军 沈旭东

【摘 要】本文对智能小车的转向控制方法进行了研究,其前轮采用舵机进行转向控制,后轮使用电子差速控制转向,在阿克曼转向原理的基础上,分析了内外轮电子差速的计算方法,并使用增量式PID控制算法对内外轮差速进行稳定控制,也给出了电机PWM频率选择的方法和占空比电压补偿算法,实验测试证明,该方法简化了智能小车转向系统的设计,具有很好的稳定性和控制精度。
【关键词】阿克曼转向原理,差速PID控制,PWM频率选择,占空比电压补偿
中图分类号:TN957.51 文献标识码:A
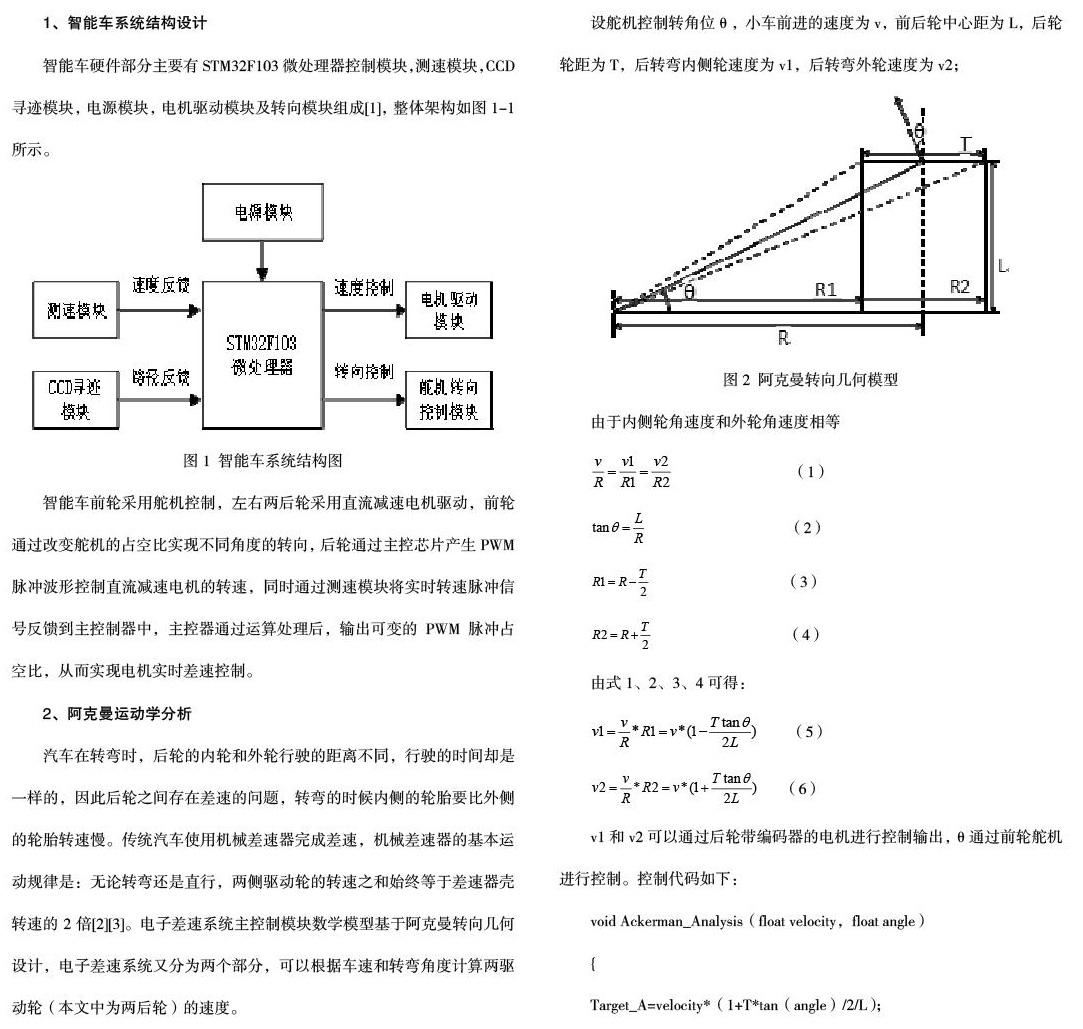
1、智能车系统结构设计
智能车硬件部分主要有STM32F103微处理器控制模块,测速模块,CCD寻迹模块,电源模块,电机驱动模块及转向模块组成[1],整体架构如图1-1所示。
智能车前轮采用舵机控制,左右两后轮采用直流减速电机驱动,前轮通过改变舵机的占空比实现不同角度的转向,后轮通过主控芯片产生PWM脉冲波形控制直流减速电机的转速,同时通过测速模块将实时转速脉冲信号反馈到主控制器中,主控器通过运算处理后,输出可变的PWM 脉冲占空比,从而实现电机实时差速控制。
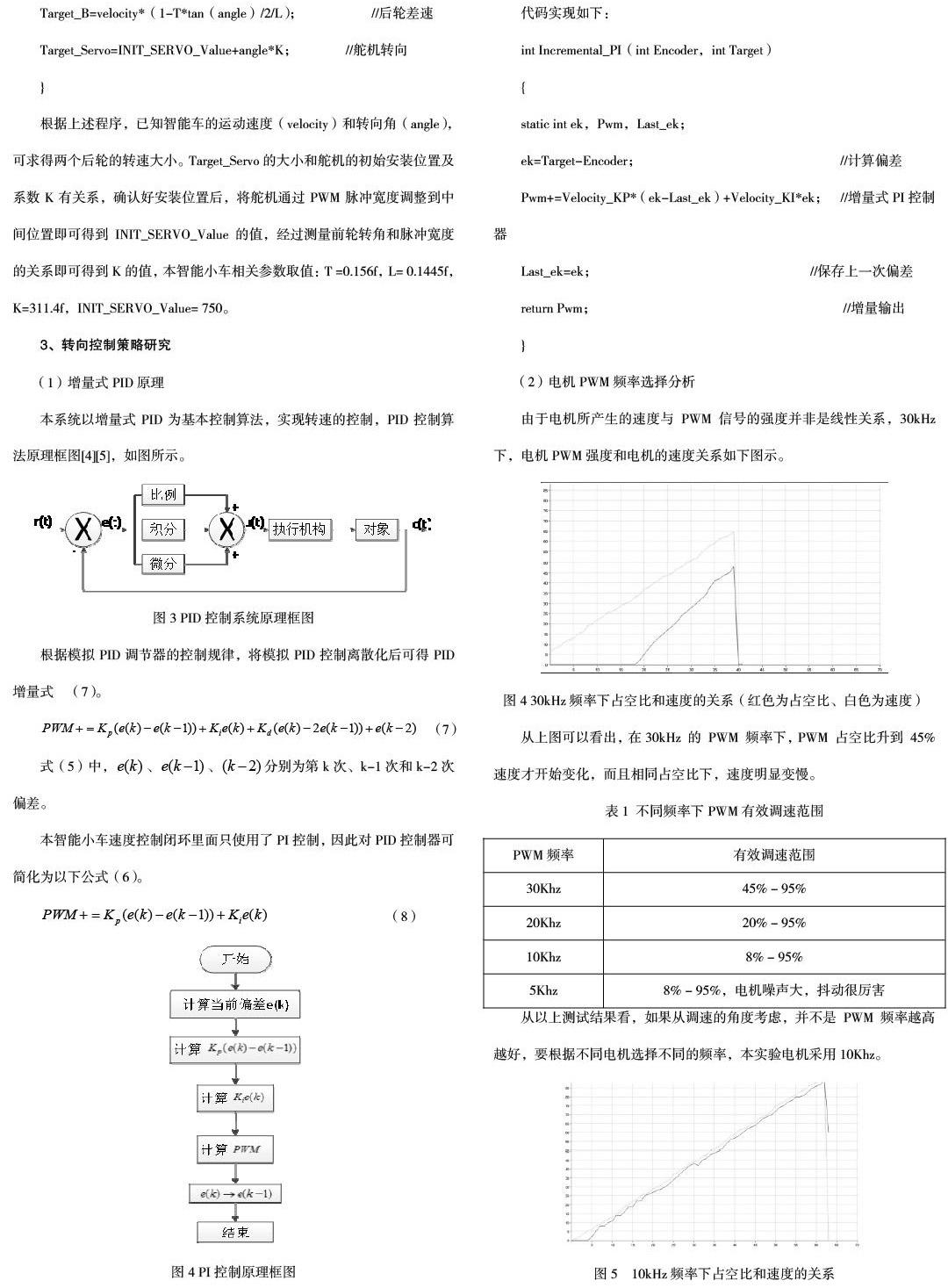
2、阿克曼运动学分析
汽车在转弯时,后轮的内轮和外轮行驶的距离不同,行驶的时间却是一样的,因此后轮之间存在差速的问题,转弯的时候内侧的轮胎要比外侧的轮胎转速慢。传统汽车使用机械差速器完成差速,机械差速器的基本运动规律是:无论转弯还是直行,两侧驱动轮的转速之和始终等于差速器壳转速的2倍[2][3]。电子差速系统主控制模块数学模型基于阿克曼转向几何设计,电子差速系统又分为两个部分,可以根据车速和转弯角度计算两驱动轮(本文中为两后轮)的速度。
参考文献:
[1]王泽元.基于CMOS 图像传感器视觉系统的智能小车的设计实现[D].长春:吉林大学,2011.
[2]吴志红,朱文吉,朱元.电动车电子差速控制方法的研究[J].电力电子技术,2008(10):64-66.
[3]孙明江,段敏,李刚.轮毂电机驱动电动汽车电子差速器仿真研究 [J].农业装备与车辆工程,2015.53(2):19-24.
[4]肖文健,李永科.基于增量式 PID 控制算法的智能车设计[J].信息技术,2012(10).
[5]刘玲玲.PID 参数整定技术的研究及应用[D].郑州:郑州大学,2010.
[6]Jittim Varagul,Toshio ITO.Simulation of Detecting Function object for AGV using Computer Vision with Neural Network,Procedia Computer Science,96(2016)159–168.
作者简介:
周燕军(1981-),女,浙江嘉興人,硕士,讲师,研究方向:从事自动化控制、单片机控制、电力电子应用技术等研究。
沈旭东(1984-),男,浙江湖州人,硕士,讲师,研究方向:单片机应用技术等研究。
(作者单位:1嘉兴南洋职业技术学院;
2嘉兴职业技术学院)
