基于NARX神经网络的路面不平度识别*
2019-08-08郭文翠谷盛丰
李 杰,郭文翠,谷盛丰,赵 旗
(吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
前言
路面不平度是车辆行驶的主要激励,既对车辆平顺性和乘员舒适性有直接影响,也对道路的质量和使用寿命有很大影响[1]。
2007年以来,国内外学者开始应用神经网络进行路面不平度识别的研究[2-6]。其基本思想是将车辆响应和路面不平度作为输入和输出,通过神经网络训练建立两者之间的关系。训练完成之后,车辆响应和路面不平度的关系为非线性关系,由车辆响应就可直接识别路面不平度。其优点是既不需要公式推导,也不需要知道车辆参数,可减少人为工作量。
基于神经网络进行路面不平度识别,目前主要采用 BP神经网络[3]、RBF神经网络[2]、小波神经网络[4]或 NARX神经网络[7-9]等。前 3种神经网络为静态神经网络,由输入层、隐含层和输出层组成,网络仅具有静态特性;而NARX神经网络为动态神经网络,其在输入层前增加时延层,使网络具有了动态特性,可由过去时刻的状态预测下一时刻的状态。
2008年,Ngwangwa[7]建立 1/4汽车 2自由度平顺性模型获得车身位移和路面不平度,应用NARX神经网络进行路面不平度识别。2010年,Ngwangwa[8]建立矿用货车平面8自由度平顺性模型获得前轮垂直加速度、车身质心垂直加速度和驾驶员上躯干加速度和路面不平度,应用NARX神经网络进行路面不平度识别。2014年,Ngwangwa[9]在小型地面车安装3个传感器,分别测量左后轮、左前轮和右后轮加速度,在矿用货车上安装2个传感器,分别测量车辆左前轮、右前轮的加速度。其对加速度进行两次积分,并且去除速度的线性趋势和位移的二次趋势处理低频漂移,将得到的速度和位移、加速度作为输入,应用训练完成的NARX神经网络进行路面不平度识别,由于通过加速度积分得到的速度和位移误差较大,影响了识别结果。
纵观Ngwangwa的研究可以发现,其先后选择的车辆响应不同,既没有考虑各个车辆响应作为输入的合理性,也没有考虑将车辆响应进行适当组合作为输入方案,不利于在实际车辆上应用。
本文中致力于解决车辆响应选择的准则和合理设计车辆响应组合确定NARX神经网络输入方案的问题,为实际应用NARX神经网络识别路面不平度提供理论和方法基础。
1 NARX神经网络和评价指标
1.1 NARX神经网络
NARX神经网络是一种典型的动态神经网络,由TDL时延层、输入层、输出层和隐含层组成。TDL时延层将神经网络的输出进行延迟处理反馈到输入层,以提高预测效果。输入层负责将输入集中起来,对输入进行权值和阈值的运算,再将运算结果传递给隐含层。隐含层可为1层或多层,负责接收数据,继续进行权值和阈值的运算,最终传递给输出层。输出层负责将传递过来的计算输出与期望输出进行比较,得到误差值,再反向修正权值、阈值和传播输出数据。
典型的NARX神经网络结构如图1所示。TDL将输入xi和输出yk进行c阶延迟处理,对输入既可进行延迟处理也可不进行延迟处理。输入神经元个数为n,隐含层为1和隐含层神经元个数为l,输出层神经元个数为m,隐含层阈值为aj,输出层阈值为bk,期望输出为ok,期望输出与计算输出之间的误差为ek,输入层与隐含层之间的权值、输出延迟层与隐含层之间的权值和隐含层与输出层之间的权值分别为 ωij,ωsj,ωjk。
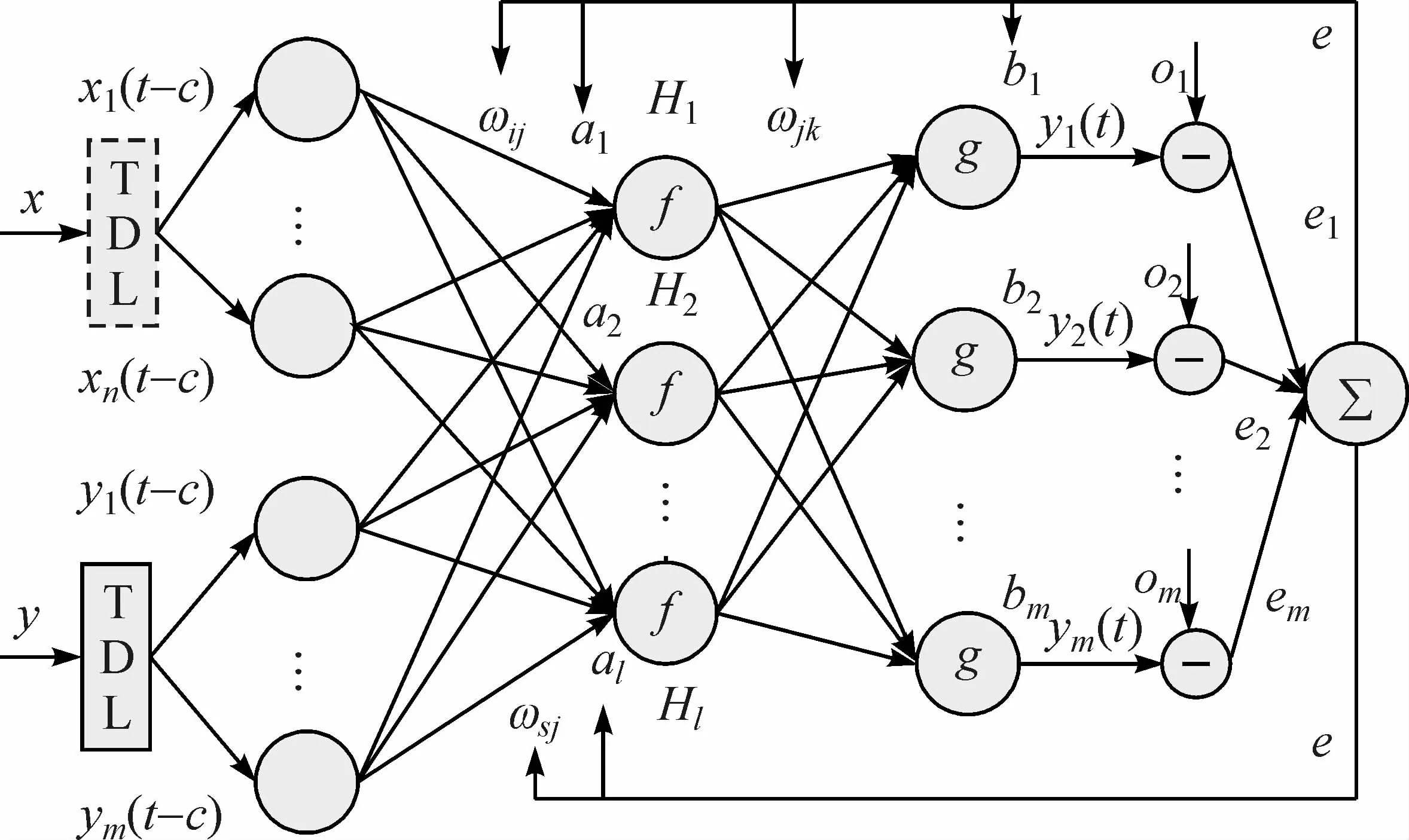
图1 典型的NARX神经网络结构
1.2 NARX神经网络训练过程
确定NARX神经网络结构后,对神经网络进行训练,训练过程如下。
第1步:网络初始化
确定 n,m,l,ωij,ωjk,ωsj,aj,bk和 c等参数;设置训练步数、学习率η、隐含层和输出层的传递函数f和g。
第2步:隐含层输出计算

第3步:输出层输出计算

第4步:误差计算

第5步:权值更新
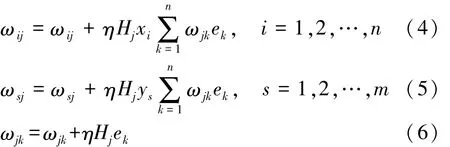
第6步:阈值更新

第7步:判断迭代是否结束,如果没有结束,返回第2步继续迭代。
1.3 NARX神经网络结构设计
NARX神经网络TDL时延层、输入层、输出层的神经元个数由实际问题的输入和输出确定,一般对输出只进行1次延迟处理,不进行多次延迟处理。
在实际应用中,隐含层一般取为1层,隐含层神经元节点数 l[10]为

式中a为0~10之间的常数。
通常,隐含层传递函数f取为logsig,输出层传递函数g取为purelin,分别表示为

神经网络的权值和阈值通过训练算法调整,NARX神经网络有14种训练算法,其中默认训练算法为 trainlm,训练速度快,识别精度高[10]。
1.4 评价指标
为对NARX神经网络识别结果进行评价,引入相关系数和均方根误差两个评价指标[11-12]。
相关系数R表示计算输出与期望输出变化趋势一致的程度,均方根误差RMSE表示识别结果的稳定性:
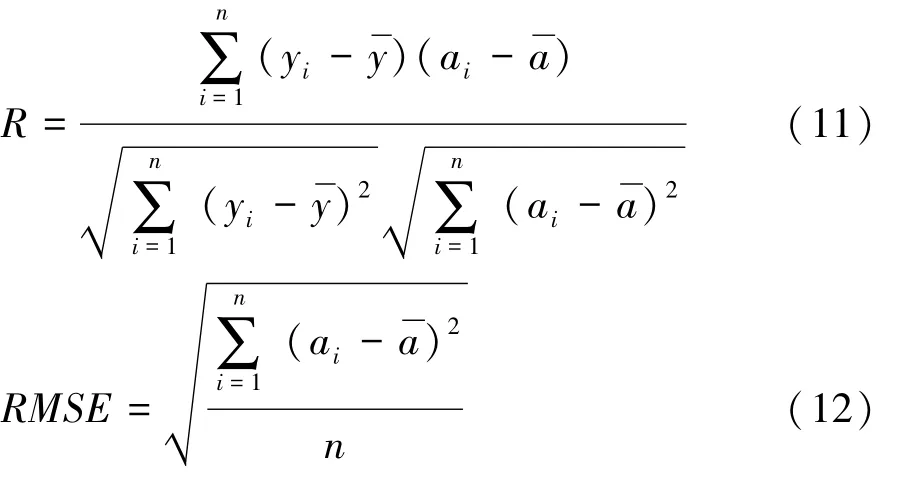
式中:yi和ai分别为计算输出和期望输出的第i个点;y和a分别为计算输出和期望输出的平均值;n为采样点数。
相关系数越高,说明识别越好。均方根误差越小,识别结果越好、越稳定可靠。两者同时最好表示识别效果最佳。
2 平顺性模型
2.1 前后轮路面不平度模型
采用滤波白噪声模型描述前后轮路面不平度q1和 q3,表示为[13]
式中:w(t)为均值为0和方差为1的标准高斯白噪声;u为车速;Gq(n0)为路面不平度系数;nq为空间下截止频率,nq=0.0001;n0=0.1为参考空间频率;td为前后轮滞后时间。
引入 q=[q1,q3]T,联立式(13)和式(14),有

其中
2.2 汽车平顺性4自由度平面模型
平顺性4自由度平面力学模型由车身、前后悬架和前后车轮组成,如图2所示,其参数说明见文献[13]。
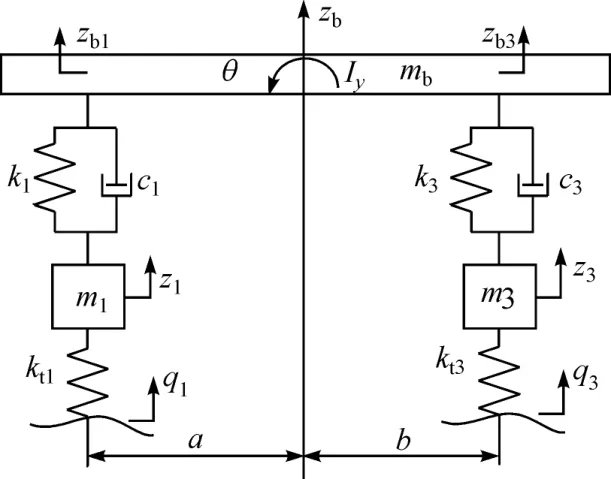
图2 平顺性4自由度平面模型
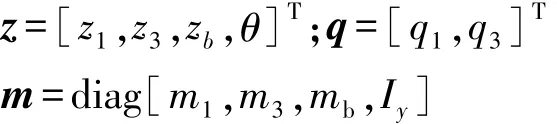
平顺性4自由度平面模型[13]表示为

其中

2.3 平顺性和路面不平度平面模型
引入x=[z,z·]T,将式(16)转化为状态空间方程,有

取新变量 y=[q,x]T,组合式(15)和式(17),得

对于平顺性4自由度平面模型,前悬架动挠度fd1和后悬架动挠度fd3可表示为

3 路面不平度NARX神经网络识别
3.1 输入选择
由于希望在实际车辆上应用NARX神经网络识别路面不平度,因此,应当选择可在实际车辆上测试的车辆响应作为NARX神经网络的输入。
3.2 输入方案的正交试验设计
根据输入选择,可以用于NARXBP神经网络输入的车辆响应为8个。如果每个车辆响应有作为输入和不作为输入两种情况,全部车辆响应进行组合,就有28=256个输入方案。因此,为了减少输入方案的个数,引入正交试验设计确定具有代表性车辆响应的组合作为输入方案。
正交试验设计通过正交表实现代表性输入方案的设计。正交表常用La(bc)表示,L为正交表,a为正交表的行数,b为因素的水平数,c为正交表的列数。
正交表选择的基本原则[19]是:水平应与正交表水平数一致,正交表的列数应大于或等于因素个数,在容纳因素的情况下选取小号正交表。
根据上述选取原则,将每个车辆响应视为一个因素,选取的正交表格式为L32(231)。每个因素对应一列,其余为空列。输入方案中不包含某个响应,其水平为1;包含某个响应,其水平为2。
3.3 输入和输出的获得
通过平顺性模型仿真可获得前后轮路面不平度和车辆响应。由于前后轮路面不平度仅差一个滞后时间td,因此,将前轮路面不平度作为识别对象,即NARX神经网络的输出。于是,输入层神经元个数n为8,代表8个响应。输出层神经元节点数m为1,代表前轮路面不平度。
采用某汽车参数,取常用路面等级B级,车速为常用车速60 km/h,仿真时间为21.6 s,采样间隔为0.01 s。因此,仿真路段总长为360 m,采样间隔为167 mm,介于150~200 mm之间,符合实际的采样间隔,采样点数为2 160。仿真结果如图3所示。
将前240 m的1 440个点的前轮路面不平度作为训练集输出,将后120 m的720个点的前轮路面不平度作为测试集的输出,确定神经网络识别的效果。
3.4 路面不平度识别
隐含层为单层,隐含层神经元个数由公式确定为14,输入不设置延时,输出延时为1∶2[9]。依据正交表L32(231)确定32个输入方案的水平。
采用NARX神经网络,基于车辆响应对前轮路面不平度进行识别,取5次平均值。限于篇幅限制,仅给出32个方案的评价指标,如表1所示。对于相关系数和均方根误差,8个因素的各水平均值的结果如表2所示。
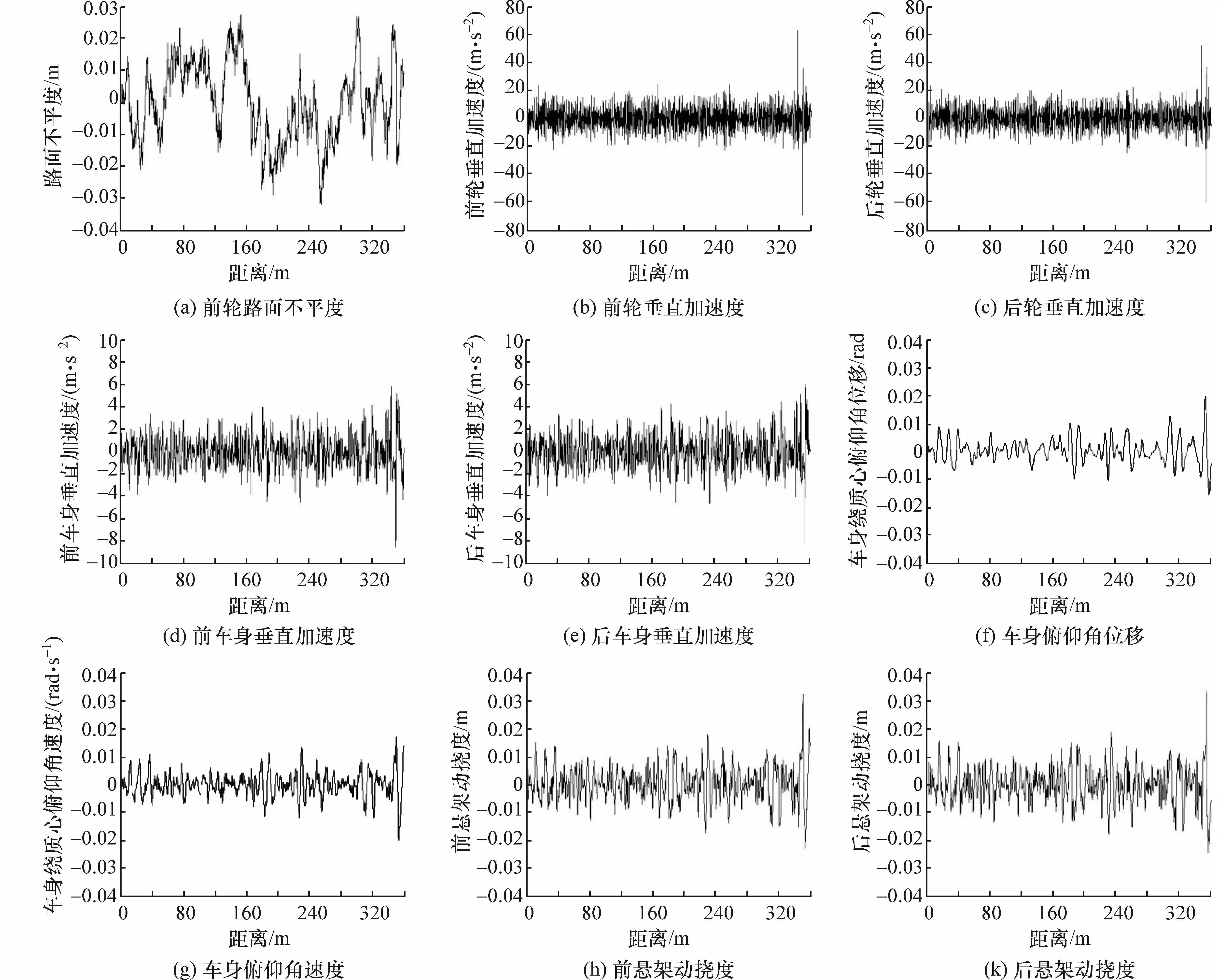
图3 前轮路面不平度和车辆响应
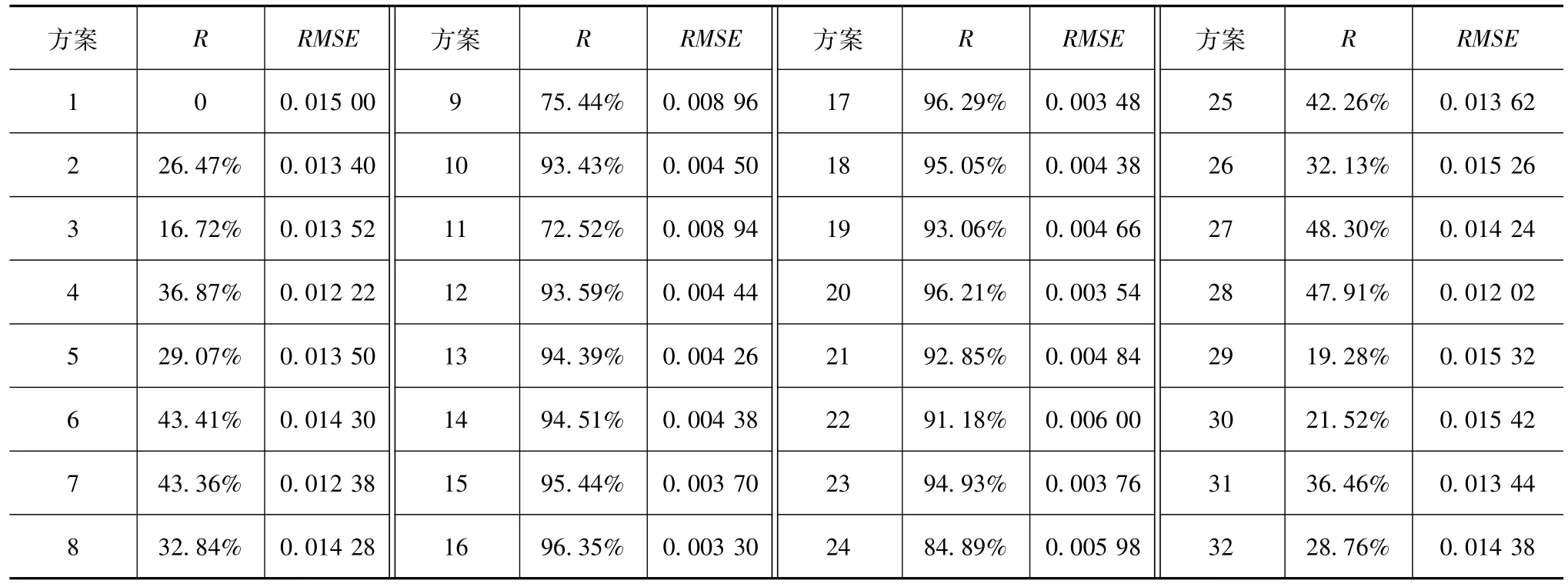
表1 NARX神经网络正交试验设计的评价指标
由表1可以看出,方案9至方案24,相关系数比较高,超过了60%,大部分超过90%,达到了极强相关的程度,与其余16个方案相比,均方根误差也比较小,方案16相关系数最高,同时均方根误差最小。
为了解决上述问题,由正交试验设计对相关系数和均方根误差进行方差分析[19],结果如表3所示。
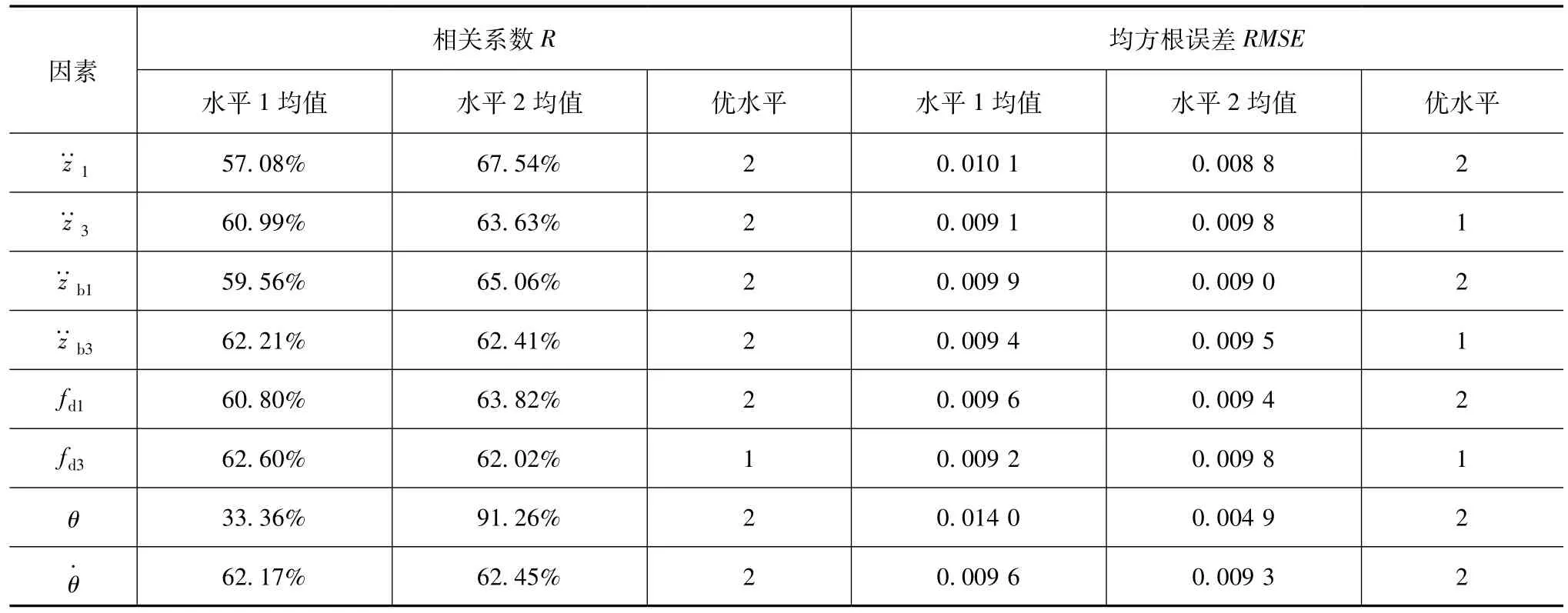
表2 NARX神经网络正交试验设计水平均值
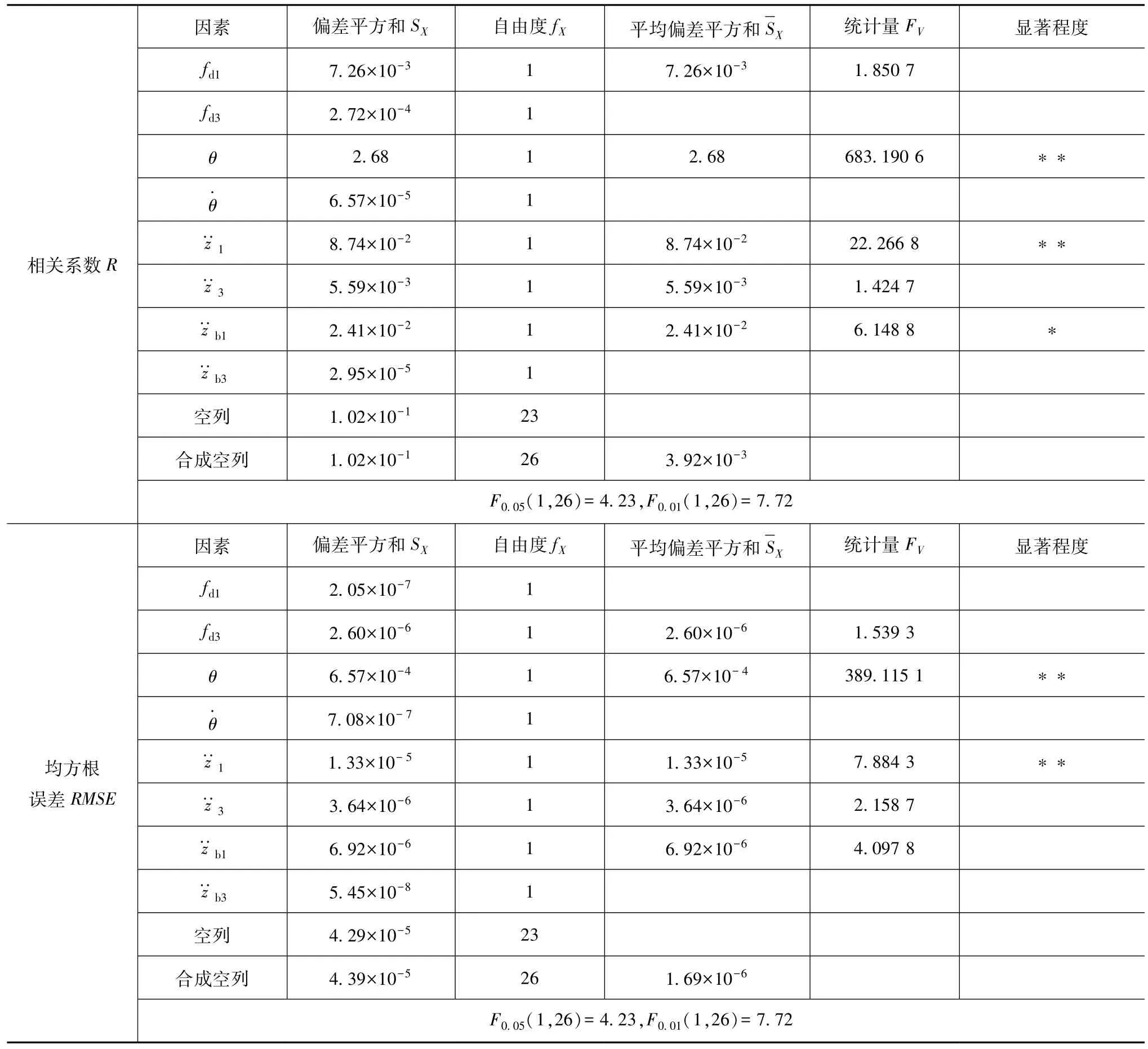
表3 NARX神经网络识别结果方差分析
由图4可以看出,优水平方案的计算输出和期望输出吻合程度都很高,功率谱密度在整个频率区间内吻合较好。
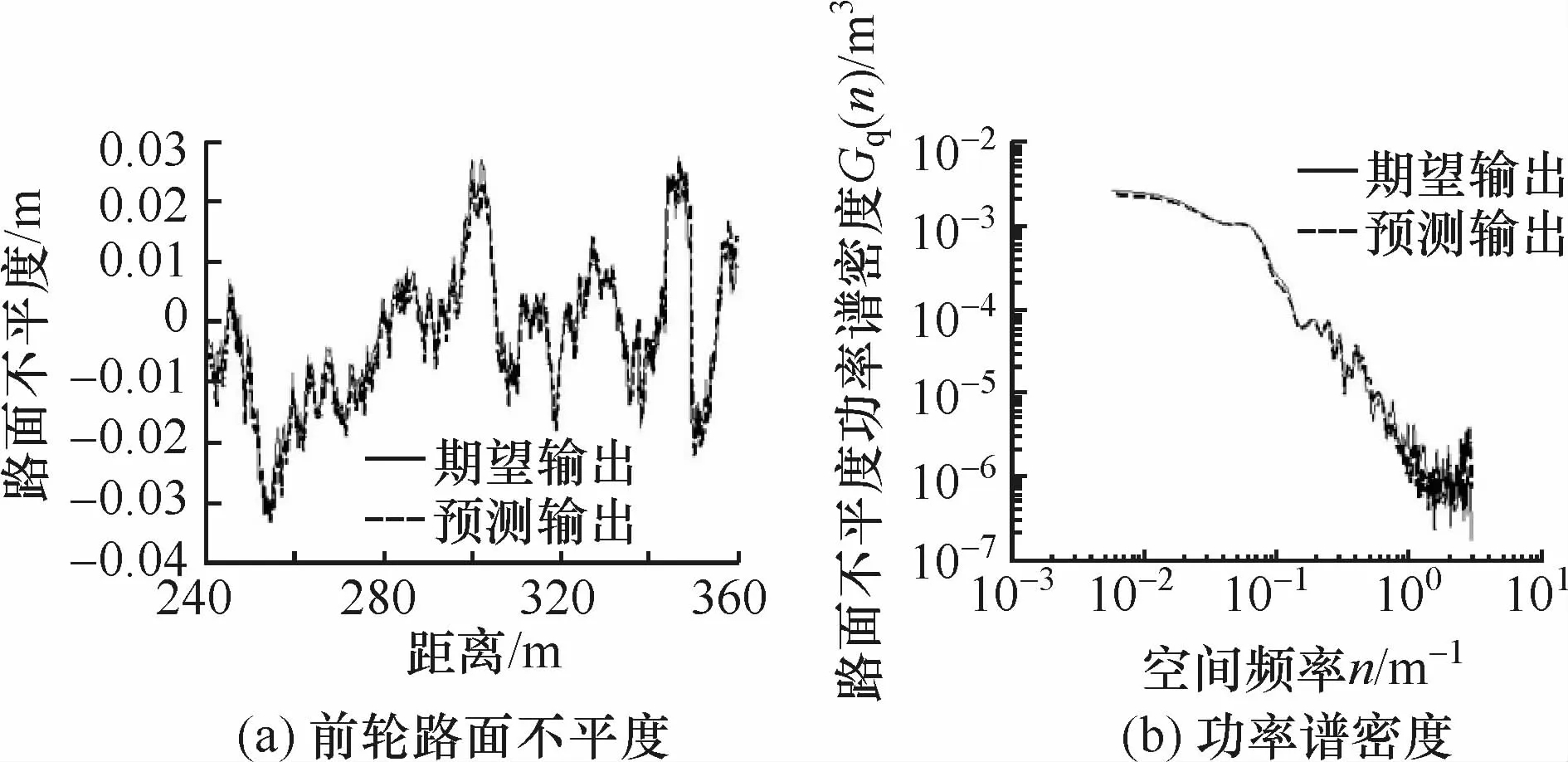
图4 NARX神经网络优水平方案的识别结果
比较原方案16和优水平方案可以看出,优水平方案依然是最好的输入方案,而且需要的车辆响应也最少。因此,确定优水平方案为最优输入方案。
4 讨论
4.1 NARX神经网络的离线训练和在线应用
实际应用神经网络,需要离线训练和在线应用两个过程。离线训练过程,是确定合适输入和输出,选择适当的神经网络进行训练和测试,最后确定出输入和输出的神经网络非线性关系。在线应用过程,是实际测试输入,再代入神经网络非线性关系确定出输出。这样,就有效解决了神经网络训练和测试耗时较长的问题。
针对路面不平度识别,测试z··1,z··b1,θ·,θ和fd1,再将其代入训练NARX神经网络,就可通过计算获得路面不平度,相对而言在线应用的耗时不长。
4.2 NARX神经网络识别结果的适应性分析
为了说明NARX神经网络识别结果的适应性,应用60 km/h和B级路面训练完成的NARX神经网络,改变车速后对路面不平度进行识别,得到的评价指标如表4所示。
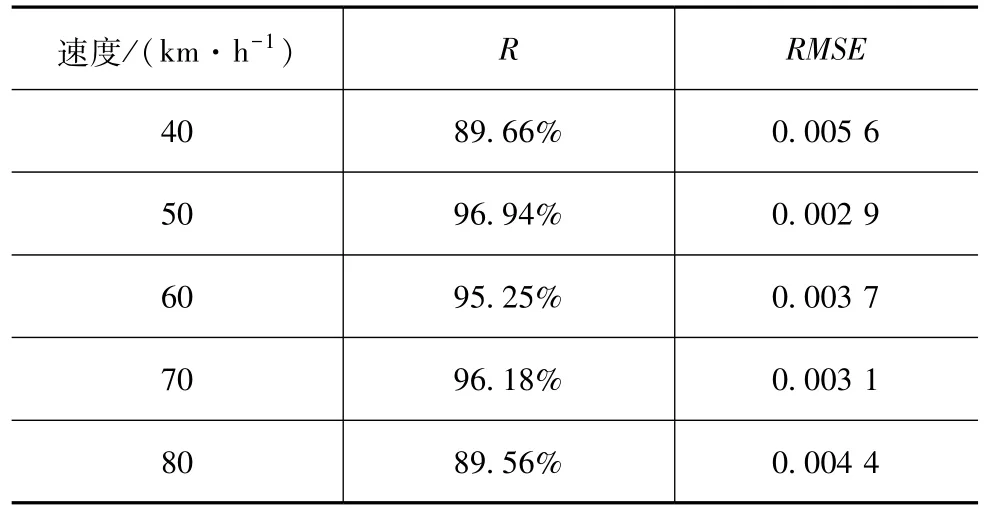
表4 不同速度路面不平度识别的结果
由表4可以看出,50~70 km/h时,相关系数在95%以上,均方根误差在0.004以下,识别结果较好;40和80 km/h时,相关系数有所下降,均方根误差有所上升,但识别结果仍较好,因此说明NARX神经网络识别结果对车速变化具有较好的适用性。
应用60 km/h和B级路面训练完成的NARX神经网络,改变路面等级后对路面不平度进行识别,得到的评价指标如表5所示。
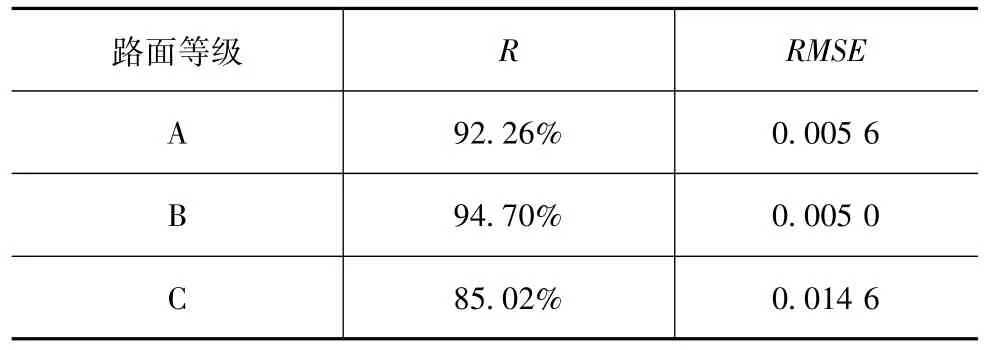
表5 不同路面等级路面不平度识别结果
由表5可以看出,A级路面和B级路面的识别结果较好,C级路面识别结果达到良好。由于我国建设的发展,城市路面等级一般为B级,C级路面属于少数状况。因此,说明NARX神经网络识别结果对路面等级变化具有较好的适用性。
本文中的研究目前只限于道路整体水平的情况,没有考虑道路的坡度影响。事实上,道路坡度识别也是车辆动力学研究的一个非常重要和正在推进的方面,将道路坡度识别和坡道路面不平度识别相结合,将成为今后研究的一个方向,此外,如何通过道路试验验证本文的研究结果,也是今后研究的另一方向。这两个方向的推进,都需要在理论和方法上对基于神经网络的路面不平度识别方法开展更为全面的研究和分析。
5 结论
对NARX神经网络及其训练过程和结构设计进行了研究和总结,采用相关系数和均方根误差作为NARX神经网络识别效果的评价指标。建立了前后轮路面不平度滤波白噪声模型和汽车平顺性4自由度平面模型,通过仿真可得NARX神经网络的输入和输出。
为解决基于NARX神经网络路面不平度识别存在如何考虑哪些车辆响应适合作为输入和如何合理组合车辆响应作为输入方案的问题,以车辆可以测试的车辆响应作为NARX神经网络输入的准则,引入正交试验设计解决了NARX神经网络车辆响应组合输入方案和最优输入方案确定的问题,采用方差分析解决了优水平矛盾车辆响应水平确定问题。
某汽车在常用路面等级和常用车速行驶下前轮路面不平度识别的研究结果表明,引入相关系数和均方根误差可以解决NARX神经网络识别效果评价问题,而将NARX神经网络与正交试验设计相结合,可以解决车辆响应组合输入方案和最优方案问题。这些结果为后续实际应用NARX神经网络或其他神经网络识别路面不平度奠定了一定理论和方法的基础。