集中式太阳能逆变器快速MPPT方法
2019-08-05范瑞祥苗洁蓉王文彬解大
范瑞祥 苗洁蓉 王文彬 解大

摘 要:针对集中逆变式太阳能光伏电站最大功率点追踪(MPPT)问题,提出快速追踪方案。基于光伏(PV)电池单二极管5参数模型,建立考虑了失配参数的光伏阵列输出电压电流关系的数学模型,并通过实测电压、电流数据形成求解参数的非线性方程组;通过迭代算法获得各参数的值,进一步可以建立参数与实时温度和光照的对应数据库;运用拉格朗日乘子法对获得的U-I关系求解最大功率点,同时采用设置多初值的方法避免多峰导致的局部最优情况。最后,再通过外电路调节,可一步到位将电路运行点调整至最大功率点。快速MPPT方法求解最大功率点更直接,调节更迅速,对电路的干扰更小。
关键词:光伏发电;最大功率点跟踪;集中式光伏;5参数模型;拉格朗日乘子法
中图分类号:TM 615
文献标志码:A
文章编号:1007-449X(2019)07-0113-07
Abstract:Aiming at maximum power point tracking (MPPT) problem of centralized inverter solar power station, a quick strategy was proposed. Based on the 5parameter singlediode model of photovoltaic(PV) cell, the mathematical model of the relationship between the output voltage and output current of the PV array was established, which also took the mismatch parameter into account. In order to determine the realtime relationship between voltage and current, several sets of measured voltage and current data were obtained to form the nonlinear equations of the parameters to get their instant values. The Newton iterative algorithm was adopted to solve the equation sets. Furthermore, a database was established according to the corresponding relationship between parameters and environmental factors including temperature and illumination. Then Lagrange multiplier method was used to obtain the maximum power point. Finally, through the external circuit adjustment, the maximum power point was achieved by only one step. The proposed method to solve the MPPT is more straightforward,quicker, and less interferential.
Keywords:photovoltaic;maximum power point tracking; centralized photovoltaic; 5parameter model; Lagrangian multiplier method
0 引 言
由于光伏(photovoltaic,PV)出力受溫度和辐照度的影响很大,为了在相同条件下获得更多的电能,需要对光伏电池进行最大功率点追踪[1](maximum power point tracking, MPPT)。目前光伏阵列的最大功率跟踪方法主要分为基于数学模型的方法[2]、基于扰动的自寻优法[3]和基于智能控制的方法[4]。
基于数学模型的方法建立在合理的数学关系上,包括开路电压比例系数法、短路电流比例系数法、扫描电流法,前两者简化了模型,利用了近似的比例关系,不准确且获得开路电压和短路电流对电路会造成短时的影响[5-6];后者虽然准确度较高但速度很慢[7]。基于扰动的自寻优法是目前研究最广也是应用较为普遍的控制方法,根据直接测量到的光伏阵列的电压和电流等信息进行最大功率跟踪[8]。包括扰动观察法(perturbation and observation, P&O)、增加电导法和类似P&O法的波动相关控制法(ripple correlation control, RCC)等[9]。这类方法需要试探性的调整电路的工作状态,逻辑简单,但比较盲目,时间不够快[10]。因此,现有的研究一般集中于解决控制的调整方向和加快控制时间方面,以应对环境条件的快速变化,减少追踪时间[11]。文献[12]利用了增加电导法能快速适应环境条件的特点,改进了固定步长的增加电导法,在步长设置中引入了即时的P-V曲线斜率参数,大斜率对应大步长,小斜率对应小步长,引入比例系数与控制器的占空比相适应从而加快了追踪速度;文献[13]采用鲁棒性能好的双积分滑模变结构控制以消除稳态误差,通过选择新的滑动面来缓解振荡影响;文献[14]通过固定电压法确定一个最大功率点(maximum power point, MPP)大致的点,离这个点较远的地方采用大步长,靠近的地方采用小步长,从而调整了扰动幅度。基于智能控制的方法一般也是与扰动寻优法相结合,通过智能控制自适应步长来改善寻优法的缺陷,减少跳动时间及MPPT附近的振荡[15]。文献[16]采用蚁群算法得到P&O法的启动初值,再用P&O法进一步追踪;文献[17]采用基于遗传算法的PI控制改善以往的P&O法。
传统的MPPT方法对最大功率点的追踪实质是局部最大功率点[18]。当由于阴影遮蔽或者其他失配情况出现时,光伏组件的P-V曲线会呈现多峰特性,这些方法往往会陷入局部最优[19]。为了获取全局最优,出现了很多新的控制方法,这些方法往往将扰动观察法与全局优化算法结合,如群优化算法、遗传算法、模糊PI调节等[20]。文献[21]采用烟花智能算法,模拟烟花爆炸产生火花,以火花为新的迭代搜索点的搜索方式,以达到全局搜索和快速追踪的目的;文献[22]采用分数阶模糊控制,根据模糊控制器的动态范围来选择分数阶数,更大的控制因子来扩展模糊域,并缩短搜索MPP的时间;文献[23]采用模拟鸟群觅食机制的粒子群算法,并与扰动观察法比较,表明其在多峰情况下仍可以追踪到全局MPP;文献[24]提出了一种新的灰狼优化算法,模仿灰狼的领导层次和狩猎机制,克服了在扰动观察中遇到跟踪效率低,稳态振荡和瞬变的问题。这些方法不依赖于模型基础,逻辑简单,但也摆脱不了多次试探性跳动给电路带来的干扰[25]。
本文基于光伏电池的5参数模型,推导了计及失配参数的光伏阵列输出电流电压关系的数学模型,利用参数的实时不变性,通过实测电压电流数据形成求解参数的非线性方程组。获得参数后,采用拉格朗日乘子法进一步确定光伏阵列实时的最大功率点。同时,考虑到阴影情况下的多峰性,采用设置多个初值点的方法求解拉格朗日的条件方程。最后结合外电路调节,可一步到位调节电路至最大功率点。本文的贡献在于:
1)改进了光伏电池的5参数模型,推导了考虑失配的光伏阵列的数学模型;
2)区别于传统的MPPT方法,从数学模型入手,直接对方程组用数学方法进行求解,独立于光伏阵列,节省了电路盲目试探性跳动的时间,也减少了对光伏阵列的干扰;
3)考虑了阴影及失配情况下的多峰特性,采用设置多个初值点迭代求解最大功率点,避免了陷入局部最优的情况。
1 串并联集中型光伏阵列结构
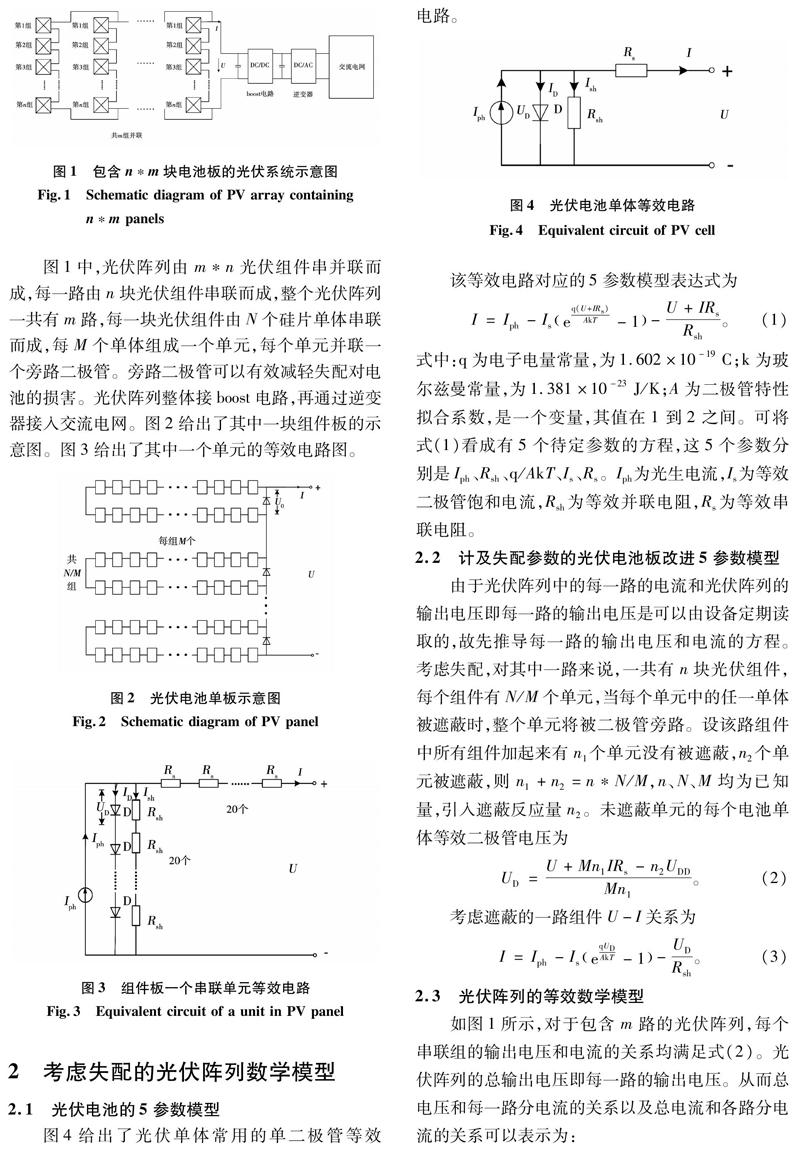
目前光伏并网多采用两级式结构,即用DC/DC变换器先将光伏阵列的直流电升压或者降压为满足并网逆变器要求的直流电压,同时实现对光伏电池阵列的MPPT,再用DC-AC逆变器,将直流母线上的直流功率逆变为交流功率,实现光伏发电能量到电网的传送。相比于单级式,两级式的控制器更易于设计,光伏组件的并联扩容也更容易实施。图1给出了这种结构的示意图。
图1中,光伏阵列由m*n光伏组件串并联而成,每一路由n块光伏组件串联而成,整个光伏阵列一共有m路,每一块光伏组件由N个硅片单体串联而成,每M个单体组成一个单元,每个单元并联一个旁路二极管。旁路二极管可以有效减轻失配对电池的损害。光伏阵列整体接boost电路,再通过逆变器接入交流电网。图2给出了其中一块组件板的示意图。图3给出了其中一个单元的等效电路图。
2 考虑失配的光伏阵列数学模型
2.1 光伏电池的5参数模型
图4给出了光伏单体常用的单二极管等效电路。
该等效电路对应的5参数模型表达式为
式中:q为电子电量常量,为1.602×10-19 C;k为玻尔兹曼常量,为1.381×10-23 J/K;A为二极管特性拟合系数,是一个变量,其值在1到2之间。可将式(1)看成有5个待定参数的方程,这5个参数分别是Iph、Rsh、q/AkT、Is、Rs。Iph为光生电流,Is為等效二极管饱和电流,Rsh为等效并联电阻,Rs为等效串联电阻。
2.2 计及失配参数的光伏电池板改进5参数模型
由于光伏阵列中的每一路的电流和光伏阵列的输出电压即每一路的输出电压是可以由设备定期读取的,故先推导每一路的输出电压和电流的方程。考虑失配,对其中一路来说,一共有n块光伏组件,每个组件有N/M个单元,当每个单元中的任一单体被遮蔽时,整个单元将被二极管旁路。设该路组件中所有组件加起来有n1个单元没有被遮蔽,n2个单元被遮蔽,则n1+n2=n*N/M,n、N、M均为已知量,引入遮蔽反应量n2。未遮蔽单元的每个电池单体等效二极管电压为
考虑遮蔽的一路组件U-I关系为
2.3 光伏阵列的等效数学模型
如图1所示,对于包含m路的光伏阵列,每个串联组的输出电压和电流的关系均满足式(2)。光伏阵列的总输出电压即每一路的输出电压。从而总电压和每一路分电流的关系以及总电流和各路分电流的关系可以表示为:
3 最大功率点跟踪方法
3.1 传统MPPT方法
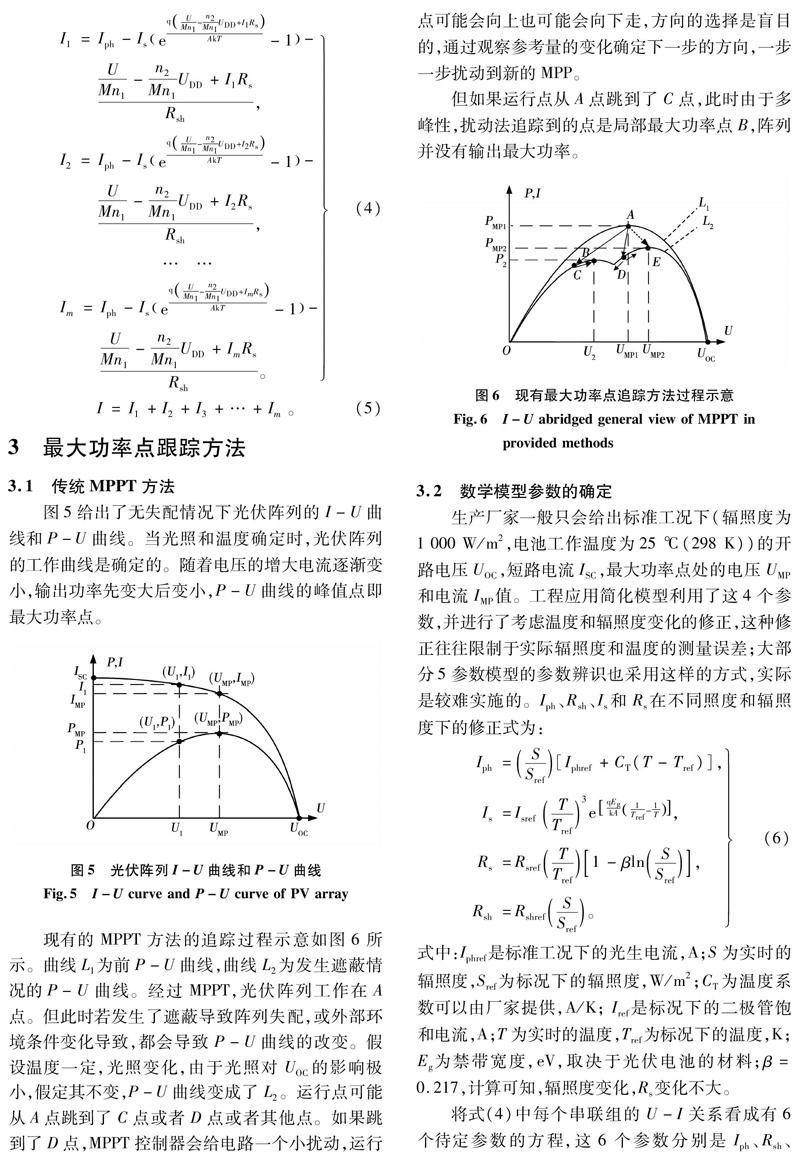
图5给出了无失配情况下光伏阵列的I-U曲线和P-U曲线。当光照和温度确定时,光伏阵列的工作曲线是确定的。随着电压的增大电流逐渐变小,输出功率先变大后变小,P-U曲线的峰值点即最大功率点。
现有的MPPT方法的追踪过程示意如图6所示。曲线L1为前P-U曲线,曲线L2为发生遮蔽情况的P-U曲线。经过MPPT,光伏阵列工作在A点。但此时若发生了遮蔽导致阵列失配,或外部环境条件变化导致,都会导致P-U曲线的改变。假设温度一定,光照变化,由于光照对UOC的影响极小,假定其不变,P-U曲线变成了L2。运行点可能从A点跳到了C点或者D点或者其他点。如果跳到了D点,MPPT控制器会给电路一个小扰动,运行点可能会向上也可能会向下走,方向的选择是盲目的,通过观察参考量的变化确定下一步的方向,一步一步扰动到新的MPP。
但如果运行点从A点跳到了C点,此时由于多峰性,扰动法追踪到的点是局部最大功率点B,阵列并没有输出最大功率。
3.2 数学模型参数的确定
生产厂家一般只会给出标准工况下(辐照度为1 000 W/m2,电池工作温度为25 ℃(298 K))的开路电压UOC,短路电流ISC,最大功率点处的电压UMP和电流IMP值。工程应用简化模型利用了这4个参数,并进行了考虑温度和辐照度变化的修正,这种修正往往限制于实际辐照度和温度的测量误差;大部分5参数模型的参数辨识也采用这样的方式,实际是较难实施的。Iph、Rsh、Is和Rs在不同照度和辐照度下的修正式为:
将式(4)中每个串联组的U-I关系看成有6个待定参数的方程,这6个参数分别是Iph、Rsh、q/AkT、Is、Rs和n2。由式(6)分析可知,短时间内温度和辐照度的变化对参数的影响可以忽略不计,可视为定值,这一组参数相应确定了一条U-I曲线,通过调节外部电路,可以获得这条曲线上的不同运行点。
对于其中一个串联组件组来说,通过调整外电路工作状态6次,测量6组(U,Ii)值,分别为:(U1,Ii1)、(U2,Ii2)、(U3,Ii3)、(U4,Ii4)、(U5,Ii5)、(U6,Ii6),代入式(4)可以得到关于6个参数的6个方程,继而得到关于6个参数的方程组。通过Newton法迭代可以确定参数Iph、Rsh、q/AkT、Is、Rs及整点时的遮蔽情况n2,从而可以确定该路组件的U-Ii关系。这个实时的U-I关系考虑了失配情况,也考虑了电池的老化和衰减情况,与电池当前的工作曲线是相匹配的。迭代初值可以选取上一次迭代的解,可大大降低迭代次数,保证迭代的可行性。
3.3 利用拉格朗日乘子法跟踪最大功率
整个求解最大功率点的流程如图7所示。通过扰动电路,数据采集器采集到6组电压电流数据运行,经过参数识别模块可以输出各路组件5个参数的值和失配反映参数n2的值。接着经过上面的MPPT策略,可以输出最大功率点对应的光伏阵列的输出电压和电流。
由DC/DC电路前后功率相等,可得系统端电压电流与占空比的关系式,求出最大功率点对应的I-U值后,求出相应的占空比,调节占空比可以直接将工作点跳到最大功率点附近。
4 实测验证
本实验数据来源于上海交通大学智能电网大楼光伏系统。取其中六路光伏板的实测数据进行验证。每路由20块组件板串联而成,实验时,为了模拟局部云影遮蔽的情况,对第三路进行局部遮蔽,使其中的4块板子受“云影”影响,输出功率为0。各路为并联连接,电压相同。表1给出了各路串联组件的电压电流数据。
对各路进行参数辨识,取初值为:[Iph,Is,q/AkT,Rs,Rsh ,n] =[7,0.000 004,25,0.000 4,8 000,0],单位均为国际单位。各参数值如表2所示。
从每路的5参数值可知每路的电压电流关系,可以写出光伏特性曲线方程。再根据拉格朗日乘子法,列出6路系统优化方程的13*13的雅可比矩阵,根据迭代式可得总系统最大功率点处各路的电流值,如表3中MPP1所示。实际测得集中逆变器实际追踪的最大功率点,如表3中MPP2所示。
由表3计算可知,本文所述方法计算得到的最大功率为16.7 kW,集中逆变器MPPT控制策略追踪到的最大功率点为16.1 kW。快速MPPT方法输出功率比现场的逆变器实际输出功率高3.72%。
5 结 论
根据光伏电池的5参数模型推导出考虑失配参数的光伏阵列数学模型,考虑了5参数在不同辐照度和温度组合下的变化,设计了一种依据实时电压和电流数据的MPPT方法,各参数是实时条件下考虑光伏电池老化和衰减的实时参数。经实测验证可知,该数学方法可以很好地追踪到最大功率点附近,追踪速度快,且比目前的扰动观察法更有效。
参 考 文 献:
[1] BRITO M A G, GALOTTO L, SAMPAIO L P, et al. Evaluation of the main MPPT techniques for photovoltaic applications[J]. IEEE Transactions on Industrial Electronics,2013,60(3):1156.
[2] 倪双舞,苏建徽,周松林,等. 部分遮挡条件下光伏阵列最大功率点跟踪方法[J]. 电机与控制学报,2015, 19(4):14.
NI Shuangwu, SU Jianhui, ZHOU Songlin, et al. Maximum power point tracking methods of photovoltaic array under partially shaded condition[J]. Electric Machines and Control, 2015, 19(4):14.
[3] SALAS V, OLIAS E, BARRADO A, et al. Review of the maximum power point tracking algorithms for standalone photovoltaic systems[J]. Solar Energy Materials and Solar Cells, 2006, 90(11): 1555.
[4] FERMIA N, GRANOZIO D, PETRONE G, et al. Predictive & adaptive MPPT perturb and observe method[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(3): 934.
[5] 张超,何湘宁. 短路电流结合扰动观察法在光伏发电最大功率点跟踪控制中的应用[J]. 中国电机工程學报,2006,26(20):98.
ZHANG Chao, HE Xiangning. Shortcurrent combined with perturbation and observation maximumpowerpoint tracking method for photovoltaic power systems[J]. Proceedings of the CSEE, 2006,26(20):98.
[6] MASOUM M A S, DEHBONEI H, FUCHS E F. Theoretical and experimental analyses of photovoltaic systems with voltage and currentbased maximum powerpoint tracking[J]. IEEE Transactions on Energy Conversion, 2002, 17(4): 514.
[7] LEYVA R, ALONSO C, QUEINNEC I, et al. MPPT of photovoltaic systems using extremumseeking control[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1): 249.
[8] DALLAGO E, LIBERALE A, MIOTTI D, et al. Direct MPPT algorithm for PV sources with only voltage measurements[J]. IEEE Transactions on Power Electronics, 2015, 30(12): 6742.
[9] MOON S, YOON S G, PARK J H. A new lowcost centralized MPPT controller system for multiply distributed photovoltaic power conditioning modules[J]. IEEE Transactions on Smart Grid, 2015, 6(6): 2649.
[10] STANZIONE S, VAN L C, VAN S R, et al. A high voltage selfbiased integrated DCDC buck converter with fully analog MPPT algorithm for electrostatic energy harvesters[J]. IEEE Journal of SolidState Circuits, 2013, 48(12): 3002.
[11] KOLESNIK S, KUPERMAN A. On the equivalence of major variablestepsize MPPT algorithms[J]. IEEE Journal of Photovoltaics, 2016, 6(2): 590.
[12] LIU F, DUAN S, LIU F, et al. A variable step size INC MPPT method for PV systems[J]. IEEE Transactions on Industrial Electronics, 2008, 55(7): 2622.
[13] PRADHAN R, SUBUDHI B. Double integral sliding mode MPPT control of a photovoltaic system[J]. IEEE Transactions on Control Systems Technology, 2016, 24(1): 285.
[14] PIEGARI L, RIZZO R. Adaptive perturb and observe algorithm for photovoltaic maximum power point tracking[J]. IET Renewable Power Generation, 2010, 4(4): 317.
[15] MOHANTY S, SUBUDHI B, RAY P K. A grey wolfassisted perturb & observe MPPT algorithm for a PV system[J]. IEEE Transactions on Energy Conversion, 2017, 32(1): 340.
[16] SUNDARESWARAN K, VIGNESHKUMAR V, SANKAR P, et al. Development of an improved P&O algorithm assisted through a colony of foraging ants for MPPT in PV system[J]. IEEE Transactions on Industrial Informatics, 2016, 12(1): 187.
[17] SALIH H W, WANG Shaorong, FARHAN B S. A novel GAPI optimized controller for MPPT based PV in a hybrid PVdiesel power system[C]//2015 5th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT),November 26-29,2015, Changsha, China. 2015: 1288-1293.
[18] MOHAMED A A S, BERZOY A, MOHAMMED O A. Design and hardware implementation of FLMPPT control of PV systems based on GA and smallsignal analysis[J]. IEEE Transactions on Sustainable Energy, 2017, 8(1): 279.
[19] 聂晓华,赖家俊. 局部阴影下光伏阵列全局最大功率点跟踪控制方法综述[J]. 电网技术,2014,38(12):3279.
NIE Xiaohua, LAI Jiajun. A survey on tracking and control approaches for global maximum power point of photovoltaic arrays in partially shaded environment[J]. Power System Technology, 2014, 38(12):3279.
[20] SUNDARESWARAN K, PEDDAPATI S, PALANI S. MPPT of PV systems under partial shaded conditions through a colony of flashing fireflies[J]. IEEE Transactions on Energy Conversion, 2014, 29(2): 463.
[21] MANICKAM C, RAMAN G P, RAMAN G R, et al. Fireworks enriched P&O algorithm for GMPPT and detection of partial shading in PV systems[J]. IEEE Transactions on Power Electronics, 2017, 32(6): 4432.
[22] TANG S, SUN Y, CHEN Y, et al. An enhanced MPPT method combining fractionalorder and fuzzy logic control[J]. IEEE Journal of Photovoltaics, 2017, 7(2): 640.
[23] DE OLIVEIRA F M, DA SILVA S A O, DURAND F R, et al. Gridtied photovoltaic system based on PSO MPPT technique with active power line conditioning[J]. IET Power Electronics, 2016, 9(6): 1180.
[24] MOHANTY S, SUBUDHI B, RAY P K. A new MPPT design using grey wolf optimization technique for photovoltaic system under partial shading conditions[J]. IEEE Transactions on Sustainable Energy, 2016, 7(1): 181.
[25] WANG Y, LI Y, RUAN X. Highaccuracy and fastspeed MPPT methods for PV string under partially shaded conditions[J].IEEE Transactions on Industrial Electronics,2016,63(1):235.
(編辑:邱赫男)
