一种医用超声探头手柄助力器的设计*
2019-07-31刘记辰郭荣荣陈维毅
刘记辰,郭荣荣,陈维毅
(太原理工大学生物医学工程学院,山西 太原030024)
1 引 言
B超检测是常用的医学诊断手段。据统计,长期从事B超检测,存在手部关节损伤、病变的医务人员在百分之七十以上[1]。
目前,国内仅有一种超声探头助力器的设计方案,其在增压方式上,主要是通过液压或者气压方式增压。这种设计主要是将装有探头夹的机械臂与气压缸或者液压缸的驱动活塞相连接,通过液体压力能的变化来传递能量,经过多种控制阀和管路的传递,借助于液压执行元件(液压缸或马达),把液体压力能转换为机械能,从而驱动工作机构,实现直线往复运动[2]。
由于采用气压或液压增压,在控制上反应灵敏度不够,病体检测相对耗时,而且在调控压力方式上,也没有足够的安全保护措施。由于该增压装置具有液压缸和液压泵,控制阀以及各种密封器件,在装配精度上要求较高,使得整个系统相对比较庞大,当部件出现故障更换时,更换比较复杂。鉴于此,该设计并未在医院得到应用。
针对以上问题,本设计提出了一种新型助力装置;通过步进电机带动丝杆运动[3-4],且整个运动通过单片机控制,由于整个系统都是高集成化的电路以及电子芯片模块,能够满足输出压力的步进电机体积质量很小,整个系统在体积和灵敏度上占有很大优势。实际操作和医生手持探头病体检测时区别不大,习惯上的使用,更容易上手。而且突破性的增加了反馈控制系统,在操作方便的基础上,加大了安全系数,防止外加助力装置由于过度施力对病体造成不必要的损伤。
2 工作原理与实施
新型助力装置结构图,见图1。
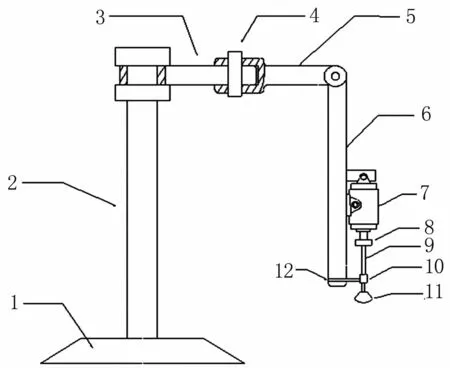
图1 系统整体结构图Fig 1 System structure diagram
如图1所示,医用超声探头手柄助力器包括支撑底座1,它可以固定到检查床位上或地面上,支撑杆2通过螺纹连接,固定在支撑底座1上,起到对整个装置的竖直支撑作用,第一水平臂3套在竖直臂2上,可以在垂直于支撑杆2的平面内做三百六十度旋转。第二水平臂5和第一水平臂3通过圆柱销4联接,使其可以绕圆柱销4转动,第二水平臂5和第一水平臂3在同一水平平面内转动。竖直臂6和第二水平臂5也是通过圆柱销连接,实现竖直臂6在竖直面内摆动。竖直臂6末端固定有步进电机7,步进电机7轴端通过联轴器8接有丝杆9。探头夹10和丝杆9螺纹连接,探头夹10与探头11刚性连接,当步进电机转动时,探头夹10可以带动探头在丝杆上下移动。探头夹10与探头11连接处装反馈压力传感器,目的是起过载保护作用;当探头11作用在病体上的压力达到某个极限值时,通过此处的压力传感器,输出反馈信号给单片机,使单片机控制步进电机停止正转,达到保护作用。探头夹10前后两侧分别设置有挡板12,挡板的顶端和竖直臂连接,其作用是在丝杆转动时阻止探头夹10做圆周转动,通过挡板的作用,探头夹只能在竖直方向上前进或后退。探头11手指操作处接有压力传感器。病体超声检测时,医务人员手指稍微对探头施加一个轴向较小的压力,通过探头11处的压力传感器发送给单片机一个信号,单片机瞬时控制步进电机7正转,通过丝杆带动探头夹下移,对病体加压。松开压力传感器,改变了施加在压力传感器的压力值,改变的压力信号传递到单片机,单片机瞬时控制步进电机7反转从而实现压力减小。
2.1 丝杆螺母副
本设计联接部分采用滚珠丝杆螺母副,其结构特点为:有螺旋槽的丝杆螺母间装有滚珠,将回转运动转化为直线运动时,可以很大程度上减小摩擦,保证了传动效率。本设计选取丝杆螺母副主要参数见表1。
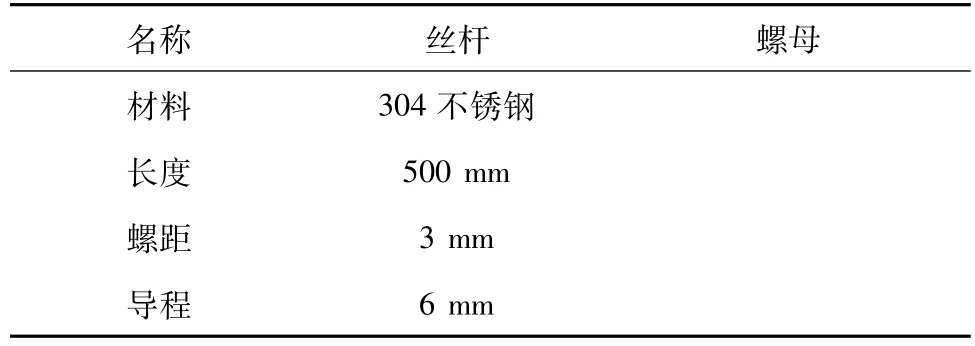
表1 丝杆螺母副参数Table 1 Screw nut pair parameters
2.2 步进电机型号
本设计对传动的定位精度要求不高,主要目的是电机工作时输出转矩能够满足病体检测所需。由丝杠上滑块式探头夹与步进电机轴间距离L,以及病体检测所需要的压力F来确定步进电机的输出转矩T,设计中选取滚珠系列直线导轨滑块,运动副之间的摩擦可以忽略不计,根据选型公式:

式中,T为阻力矩(N·M),F为阻力(N),L为阻力作用点到转轴距离(mm)。
探头实际安装位置距转轴中心170 mm,病体检测时所需压力约为30 N,确定所需转矩为5.1 NM。综合考虑,最终选取步进电机型号FHB3913-H,其主要参数见表2。
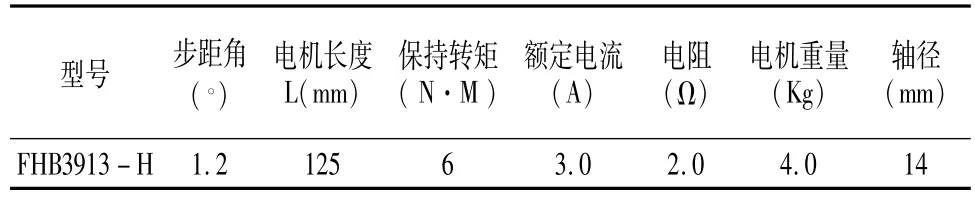
表2 步进电机参数Table 2 Stepping motor parameters
2.3 驱动模块
步进电机不能直接接入工频交流或者直流电源工作,应使用配套的驱动器。步进电机与步进电机驱动器组成步进电机驱动系统,采用单极性直流电源工作时,通过单片机控制驱动器将脉冲信号放大,使步进电机各相绕组按一定的时序通电,使其正常旋转[5-6]。根据步进电机型号,本设计所选驱动器型号为JB3722,主要参数见表3。

表3 驱动模块参数Table 3 Driver module parameters
2.4 单片机控制步进电机内容
本系统采用51单片机并行控制方法,完成对控制脉冲的分配 ,用单片机的 3条 I/O口P0.0-P0.2直接控制步进电机(A-C相)每一相驱动电路(A-C相),由单片机按照通电顺序向驱动电路发出控制脉冲[7-8],电机采用三相六拍工作方式,运动相对平稳,各相绕组通电顺序:
A-AB-B-BC-C-CA-A(正转)
A-AC-C-CB-B-BA-A(反转)
步进电机三相六拍制脉冲分配见表4。
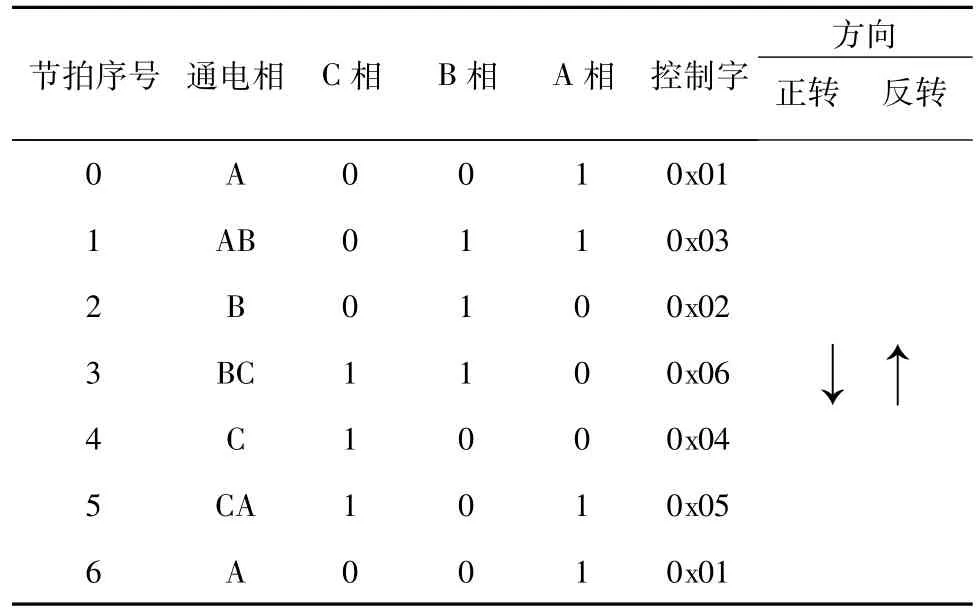
表4 三相六拍制脉冲分配Table 4 Pulse distribution
3 系统总控制流程
控制模块组成结构见图2,主要由HX711压力传感器模块,stc51单片机,以及驱动器、步进电机组成,手部传感器施加一定范围的小压力,压力信号1通过安装在超声探头手柄部位HX711压力传感器模块,将模拟电压信号经过内部AD模块放大、转换为数字信号输出传递给单片机处理。此时,信号输出总线占用单片机2个普通IO口,信号经过单片机处理后,通过单片机3条I/O口(P0.0-P0.2)输出一定时序的脉冲信号[9-11],脉冲信号经过驱动器模块JB3722放大,接入步进电机,驱动步进电机转动,步进电机正向转动后,带动丝杠上滑块探头夹向下移动,当探头夹带动探头触碰到传感器2时,压力值达到病体检测时所需的预设值,此时,压力信号2通过安装在探头与探头夹之间的HX711压力传感器模块,将信号经AD转换,放大引入单片机内部,实现中断定时,探头稳压。之后在达到中断后预设的时间内电机反转,带动丝杆上探头夹上移,完成复位。过载保护主要通过单片机检测传感器2发出的信号控制步进电机反转运动完成;当系统出现故障,步进电机一直正传时,会促使丝杆带动超声探头不断加压,达到超过正常病体检测压力的某个预设最大值时,安装在探头处的传感器2,可以灵敏的检测出此时的压力值,将压力信号及时传送给单片机,单片机驱动蜂鸣器发出报警,与此同时,控制步进电机迅速反转,促使丝杆带动探头快速上移撤力。总程序流程见图3。
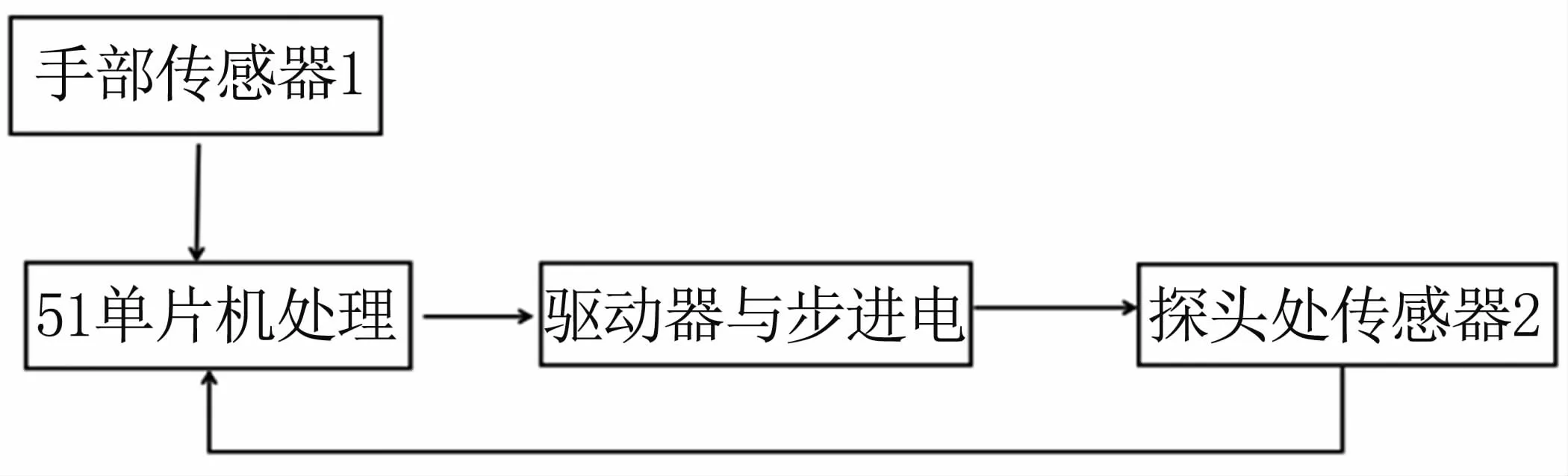
图2 控制系统结构图Fig 2 Control system structure diagram
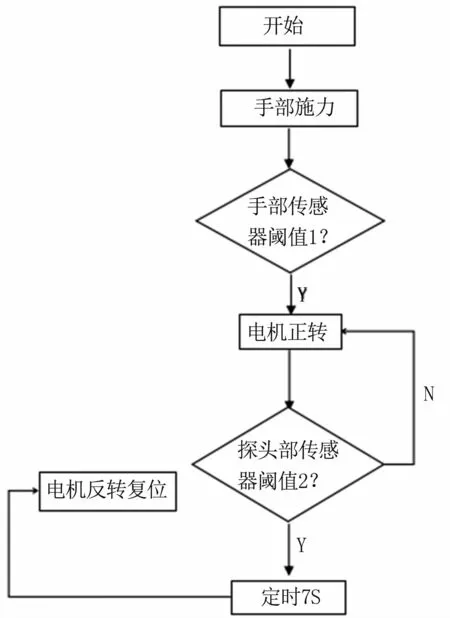
图3 总程序流程图Fig 3 Program flow diagram
4 结束语
本设计第一次将单片机控制步进电机系统作为助力装置引入到超声探头检测中,而且充分考虑到安全性和经济性。在满足安全、实用的基础上,相比传统助力器大大节约了成本造价。由于整个装置集成化程度较高,而且在设计中传感器、电机时序、转速控制等程序都是模块化设计,简单快捷,效率较高。部件搭接过程中,由于没有传统的气压、液压装置,所以安装精度要求相对较低。目前该装置在最小系统学习板上采用小功率电机、传感器等部件搭接以后,功能检测能够完全实现[12-15]。下一步将进一步改进完善以提高其可靠性和实用性。