低信噪比条件下多节点声呐目标跟踪算法∗
2019-07-25陈新华郑恩明王麟煜
李 嶷 陈新华 郑恩明 方 华 王麟煜
(中国科学院声学研究所 北京 100190)
0 引言
随着减震降噪技术的不断发展,水中目标变得日益安静,而浅海声传播又非常复杂,所以导致单个声呐探测目标的难度越来越大。因此,人们考虑建立以主动声呐为基础的多节点探测警戒网络,它由多组主/被动结合的双节点声呐构成,通过增加探测节点来获取更多的信息,相对于单节点声呐有可能提高系统探测能力。
在多节点声呐探测方面开展工作较多的是北大西洋公约组织的水下研究中心,他们着重在目标自动跟踪和多节点信息处理方面展开研究,在目标跟踪方面的创新点包括:分析亮点协方差的统计特性,采用计算高效的多假设数据联合算法,利用集中式和分布式数据融合架构来优化跟踪性能等[1−5]。他们的研究主要集中在理论和仿真分析方面,也做过有限的几次海上实验[6−8],实验中的回波用回声发生器模拟产生。北大西洋公约组织的研究人员用海试数据研究了基于亮点的目标跟踪方法,采用最大似然概率数据联合跟踪架构对亮点进行顺序处理,该方法适用于观测到的亮点较少的情况[9−10];Braca等[11]和Papa等[12]利用海试数据研究了分布式融合策略,分别对基于亮点和基于轨迹的两种数据共享模式进行了分析,亮点共享采用贝叶斯寻迹方法,轨迹共享采用基于联合事件的顺序判决方法,实验数据分析说明采用融合策略得到的目标探测性能比单节点探测的性能更优,文中还分析了通信能力下降对跟踪性能的影响;Sildam等[13]根据目标的速度、航向、回波占据的波束数量等对亮点数据进行特征抽象,根据特征信息的差异和特征数量对亮点进行分类得到轨迹,文中得到了四种类型的轨迹;Ferri等[14]研究了多节点网络中运动节点的自治策略,提出一种用在AUV上的数据驱动任务管理层方法,它通过合理调配AUV来提高对目标的检测和跟踪性能。国内在多节点声呐目标跟踪方面的研究以数据仿真为主,提出了各种基于滤波理论的目标跟踪算法[15−16]。但是,目前国内还没有相关实验数据处理结果。
本文以真实目标为探测对象,对多节点声呐探测实验数据进行分析,根据实验中出现的回波信号质量差、虚警概率高等现象,提出一种适用于低信噪比的多节点条件下目标跟踪方法。
1 理论分析
1.1 探测模型
多节点声呐探测模型中通常有一个或多个主动声呐以及多个被动声呐,它可视为由一组组的双节点声呐探测模型构成。双节点声呐中的一个节点为主/被动声呐,它发射全向主动信号,并接收目标回波信号;另一个节点作为被动声呐,接收目标的回波信号。两个节点实现时间同步,且每个节点能判断信号到达的方位和时间。
双节点声呐探测布局图如图1所示。图中S/R为收发一体的节点,R为接收节点,T为目标,α为目标回波信号到S/R节点的入射角度,β为目标回波信号到R节点的入射角度,p1为发射的脉冲信号,p2为到达S/R节点的目标回波信号,p3为到达R节点的目标回波信号。图1中时间轴0点对应发射脉冲信号的起始时刻t1,t2为回波信号p2到达S/R节点的时间,t3为回波信号p3到达R节点的时间。
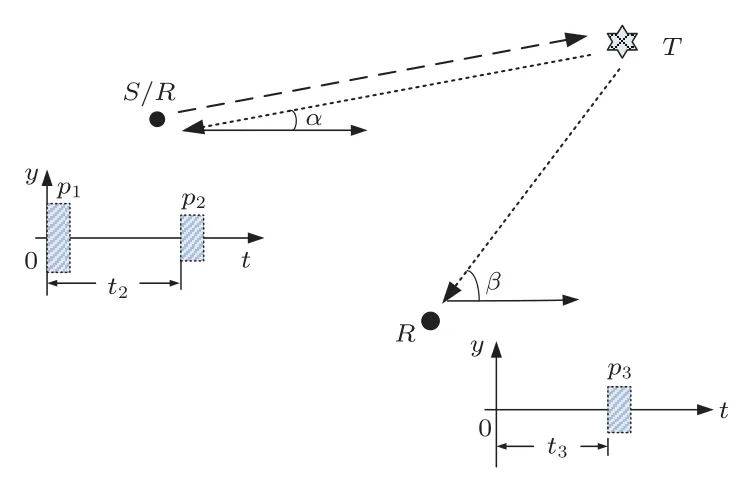
图1 双节点声呐探测布局图Fig.1 Layout of bistatic sonar
双节点声呐中主动声呐节点分批次发射主动脉冲信号,当所有声呐接收完该批次的回波信号后,主动声呐节点再发射下一批次主动脉冲信号。针对每批次脉冲,以主动声呐节点发射脉冲信号的起始时刻作为时间起点,经数据处理后,各声呐节点能得到一幅时间-方位-信号强度三维图,如图2所示,图中箭头指示的强信号区域为目标回波信号。从图2可看出,在低信噪比情况下,很难从如图2所示的杂乱图中提取出干净的目标回波,通常目标回波与大量杂波混在一起,甚至可能提取出的全是杂波信号。
当信噪比较高时,根据双节点声呐工作原理和目标回波出现的时间/方位可实现目标定位,且对于双节点声呐的两个节点,它们分别测量得到一组目标定位值。

图2 目标回波探测结果Fig.2 Echo of target
对于主被动一体的声呐节点,得到目标定位结果为
同理,对于被动声呐节点,得到目标定位结果为

1.2 双节点声呐探测结果
实际工作中,很难准确地判定哪个信号为回波信号,因此通常会把大量的杂波信号作为可能的回波信号进行处理。将这些信号参数代入式(1)或式(2)后,可计算得到亮点坐标位置。针对每批次主动脉冲信号,能计算得到一批亮点,它们中的大部分可能都是由杂波信号计算得到。将各批次亮点按照时间排序,得到如图3所示结果。

图3 亮点数据的空、时分布图Fig.3 Space and time distribution of contacts
对于水中运动目标,其航速较低,运动方向变化缓慢,所以可以用匀速运动模型来表示。即:单个观测节点在时间序列tk∈(tn1,tn2,···)上观测到目标状态为

其中,k对应主动脉冲信号发射批次,且

其中∆tk=tk+1−tk,wk为零均值高斯白噪声,满足wk∼N(0,Qk),xk、yk为由公式(1)、公式(2)计算得到的目标坐标,˙xk、˙yk为由目标前后时刻坐标推算得到的目标运动速度。由式(3)可知,由于水中目标运动速度较慢、运动方向变化缓慢,所以当主动声呐发射脉冲时间间隔较短时,被动声呐检测到的目标位置坐标变化不会太大。
根据目标匀速运动特性,可对图3采用M/N确认逻辑进行目标轨迹判断,即:当在N个连续的脉冲批次中有M个亮点的位置在预测范围内变化时,认为这N个亮点为目标轨迹点,否则认为是杂波点。如图3所示,图中星点为确认得到的目标轨迹点,其余为需要剔除的杂波点。
1.3 多节点声呐数据融合
理论上,各声呐节点探测得到的真实目标轨迹应该重合。但是,当信噪比较低时,各节点得到的轨迹为散乱的断续轨迹线段,其中很多轨迹为虚假轨迹,各节点得到的轨迹线段间也没有重合区段。因此,这给后续的多节点数据融合增加了难度。
为充分利用多节点探测的优势,本文利用“结合置信度水平的表决融合”算法来研究目标真实轨迹。
首先,对目标轨迹进行置信度划分,用轨迹上亮点对应的回波信噪比来描述置信度水平,当轨迹上各点的信噪比(S/N)较高时,认为这条轨迹的置信度水平也较高;否则,认为置信度水平较低。例如:在图4中,根据目标的匀速运动特性,可以由左边的亮点得到右边两种目标轨迹。但是,图4中轨迹2上的定位点信噪比高于轨迹1上的定位点信噪比,所以轨迹2的置信度水平更高。
在确定了轨迹置信度后,算法对轨迹进行投票表决。当认定目标轨迹“存在”的声呐节点个数达到一定门限且轨迹的综合置信度水平达到一定程度时,对目标轨迹予以最终确认;否则,抛弃该段轨迹。这里,节点个数与综合置信水平之间具有一定的补充性,当参与确认的节点个数很多时,对置信水平的要求可适当放低;相反地,当置信水平较高时,参与确认的节点个数可减少一些。
考虑到表决融合算法对于输入量应为逻辑值的要求,本文针对每个节点的当次检测结果划分若干等级作为相应的置信水平等级。例如:A节点当次检测结果可以划分为两个置信水平等级,分别用A1、A2表示,且A1⊃A2,即在A2的置信水平下检测到目标时,则必然在A1的置信水平下也检测到目标;反之则不然。
对于上面所述的双节点声呐探测模式,假设探测节点分别为A、B,此处采用“与或”逻辑关系得到系统检测概率为

利用概率公式P(X+Y)=P(X)+P(Y)−P(XY)和Pd(A1A2)=Pd(A2)及Pd(B1B2)=Pd(B2),得到

同理可得到双节点声呐系统的虚警概率为

假设置信度为A1、B1的检测概率分别为Pd(A1)=0.9、Pd(B1)=0.9,置信度为A2、B2的检测概率分别为Pd(A2)=0.8、Pd(B2)=0.8,且A、B节点相互独立探测,那么由公式(7)得到经过“与或”处理后的检测概率为Pd=0.97。也就是说,在没有提高检测门限的情况下,通过多个节点的数据融合,可以提高系统整体检测概率。
从上面的分析可看出,置信度级别数目的确定取决于算法融合系统对事件检测概率和虚警概率的要求以及对目标跟踪精度的要求等。系统设计者将对各节点的检测结果和置信度级别进行组合,当组合后的结果满足系统要求的指标时,可认为置信度等级划分和组合模式设计是合理的,否则应对置信度水平划分和各节点探测结果的逻辑组合模式进行调整。
最后,由于在低信噪比条件下各节点得到的轨迹断续、不重合,而且存在交叉、分岔等特点,所以很难用轨迹线的方式将各段轨迹进行合并后拟合。本文在经过上述单节点声呐滤波、多节点声呐数据融合后,将各声呐节点剩下的所有亮点视为目标轨迹点,后期对这些亮点采用最小二乘法进行轨迹拟合。
1.4 算法流程
由前面的理论分析可知,本文提出的低信噪比条件下多节点声呐目标跟踪算法可分为如下步骤实现:
(1)对单节点探测结果利用匹配滤波方法确定可能的目标回波信号;
(2)根据回波信号的到达时间和方位由公式(1)、公式(2)确定目标坐标值,即亮点值;
(3)依据目标的时间、空间连续性特征,由公式(3)将亮点中的杂波点剔除;
(4)根据回波信号的信噪比强度对亮点划分置信度等级;
(5)结合置信度水平,利用表决融合方法对多个探测节点得到的亮点数据进行进一步的剔除、筛选;
(6)利用最小二乘法对剩下的亮点进行轨迹拟合。
本文算法既考虑了单节点的探测结果,又充分利用了多个节点的探测优势;既考虑了目标在时间、空间上的连续性,又考虑了回波信号的信噪比大小。最终实现了对目标的较高精度探测。
2 实验数据分析
将本文提出的算法应用于双节点声呐海试数据。实验中,A船自发自收脉冲信号,B船被动接收信号,合作目标C经过观测区域。A、B两船通过GPS进行定位和数据同步,两船上的声呐均具有测向功能。
首先,分别对A、B船上声呐检测到的信号进行处理,提取目标回波信号,并计算目标坐标。如图5所示,图中线段为A、B、C船的真实轨迹,线段上的三角形为船只的运动起点,图中散布的点为计算得到的亮点。从图中可看出,A船信号质量非常不好,虚警太高,亮点几乎均匀地分布在整个探测空间;B船的探测结果相对较好,但是亮点与真实轨迹的误差仍非常大,仅在目标轨迹的最后阶段,亮点与目标真实轨迹几乎完全重合。

图5 A、B船处理得到的原始亮点Fig.5 Original contacts of ship A and B
由于目标运动为连续运动,所以前后相邻的两批次脉冲间隔时间内,目标的方位信息不会发生急剧变化。根据此特性,可分别计算得到A、B船确定的目标轨迹点,它们满足空间、时间连续性条件,反之,不满足此条件的亮点视为野点。
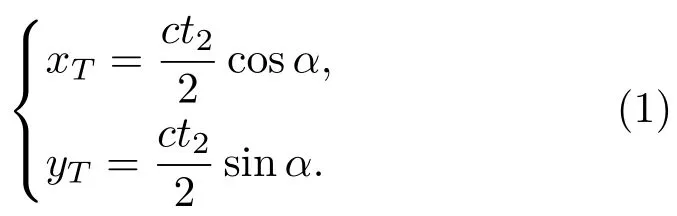
进一步,根据轨迹上定位点对应的目标回波信噪比大小,对轨迹进行置信度等级划分。如图6所示,此处将每艘船得到的轨迹划分为三个级别,分别为A1、A2、A3和B1、B2、B3。其中A1、B1的置信度级别最低,A3、B3的置信度级别最高,且A1⊃A2⊃A3、B1⊃B2⊃B3。从图6可看出,A船得到的轨迹置信度普遍不高;B船得到的轨迹置信度较高,尤其在目标轨迹的最后阶段,轨迹置信度非常高。
图6 A、B船由亮点得到的轨迹点及置信度划分Fig.6 Tracks derived from contacts and their confidence levels
得到断续轨迹并划分完置信度等级后,可采用“结合置信度水平的表决融合”算法对轨迹进行投票表决。本次实验按照下述组合逻辑进行轨迹判断和融合,并抛弃不满足此逻辑的亮点:

以A1B2为例,当A船确定的某条轨迹中有属于低置信度A1的点时,那么该轨迹附近必须同时还有B船确定的某条轨迹,且B船确定的此条轨迹中有属于较高置信度B2的点,满足上述条件时将这条轨迹上的亮点保留,并作为轨迹判决的输入数据。
最后,将各声呐节点保留的亮点综合在一起,按照亮点出现的时间顺序,利用最小二乘法进行拟合,得到如图7所示结果,图中目标C附近的虚线为目标的拟合轨迹,它与目标真实轨迹曲线吻合度较高。
从实验数据的处理可看出,本文采用的方法充分利用了多节点声呐探测的优势。当信噪比较低时,如果检测门限设置过高,那么单节点声呐可能无法得到目标轨迹;如果检测门限设置过低,那么单节点声呐可能得到大量目标轨迹虚警预报。但是,采用本文的算法,对信噪比进行置信度等级划分,并对多节点数据进行表决融合后,可得到目标轨迹,且轨迹拟合效果较好,轨迹拟合误差小。

图7 目标拟合轨迹示意图Fig.7 Fitting tracks of target
3 结论
本文采用分级滤波方法,首先根据目标的运动特性分别对各节点的亮点数据进行轨迹判定,剔除孤立的野点;然后利用多节点协同探测优势,在考虑各段轨迹置信度高低的情况下,采用多节点投票表决方法对轨迹进行判断,保留综合性能较优的轨迹段。算法通过单节点声呐到多节点声呐的逐级滤波处理,最终剔除了大部分亮点数据,有效减少了虚警概率。
本文采用的“结合置信度水平的表决融合”算法既考虑了原始回波信号的信噪比,又考虑了轨迹的连续性和置信度水平,最后还从多节点声呐决策的角度进行了分析。从文中可看出,在低信噪比条件下,单节点声呐对目标进行定位跟踪时的误差大,轨迹断续,很难得到目标的真实轨迹。但是利用多个声呐节点进行探测,并采用本文提出的数据融合算法后,可以充分利用各节点的探测优势,提高检测概率和目标定位跟踪精度。
