弧形齿滚扎式残膜回收机的设计及参数优化
2019-07-23谢建华张凤贤陈学庚韩英杰
谢建华,张凤贤,陈学庚,韩英杰,唐 炜
弧形齿滚扎式残膜回收机的设计及参数优化
谢建华1,张凤贤1,陈学庚2※,韩英杰1,唐 炜1
(1. 新疆农业大学机电工程学院,乌鲁木齐 830052; 2. 石河子大学机械电气工程学院,石河子 832000)
针对现有残膜回收机具存在残膜捡拾机构复杂、可靠性差、边膜回收率及卸膜率低等问题,从工作部件受力、捡拾机构运动轨迹的角度对起膜铲、残膜捡拾机构、卸膜机构等关键部件进行了研究,设计了一种弧形齿滚扎式残膜回收机。为探明拾膜钉齿扎膜过程中钉齿、地膜和土壤的形变、受力情况,从而指导机具的设计,运用ANSYS软件对弧形齿滚扎式捡拾机构捡拾地膜过程进行非线性有限元动力学仿真分析,仿真结果显示:在捡拾地膜过程中,钉齿末端变形最大,根部应力最大;地膜最大变形发生在与钉齿末端接触位置;土壤受到钉齿扰动变形量小。运用Box-Benhnken的中心组合方法,以机具行进速度、边膜铲铲翼与铲柄夹角、钉齿入土深度为试验因素,起边膜率、残膜捡拾率、卸膜率为试验指标,进行三因素三水平二次回归试验,建立了响应面回归模型,分析了各因素对试验指标的显著性并对因素进行了综合优化。确定最优试验参数为:机具行进速度为4.0 km/h、边膜铲铲翼与铲柄夹角为90°和钉齿入土深度为55 mm。在该条件下进行田间试验,得到起边膜率为93.5%、残膜捡拾率为87.4%、卸膜率为87.1%,与优化理论值相对误差均小于4个百分点,研究结果为残膜回收机具结构设计及工作参数选择提供理论基础和技术参考。
机械化;设计;优化;拾膜机构;卸膜机构;仿真分析;响应面试验
0 引 言
地膜覆盖技术的应用给中国的农业生产带来了可观的经济效益,同时也带来了一系列的污染问题[1-4]。由于残膜回收不彻底导致土壤渗透性差,常年的积累使土壤结构遭到破坏,严重影响中国农业经济的可持续发展[5-7]。为解决地膜污染问题,中国农机研究人员研制了多种残膜回收机具,包括钉齿式、伸缩杆齿式、夹持式、弹齿式等几十种[8-10],但普遍存在结构复杂、可靠性差以及残膜回收率低等系列问题[11-13]。2015年前,中国多数地区农业种植使用厚度不超过0.008 mm的聚乙烯地膜,由于地膜覆膜种植年限长,且回收率低等系列问题,大量的残膜滞留在土壤耕作层内,总量已达440.85 kg/hm2,其中,掩埋于地表以下的边膜占所铺设地膜比例达到7%~16%[14]。边膜与土壤发生板结黏连,回收时易与地表膜撕裂,导致边膜回收困难[15]。为解决边膜捡拾及脱卸问题,国内研究者分别对其回收机构进行了研究。康建明等[16]针对边膜存在的问题,设计了一种起膜铲,并进行了起膜铲起膜机理的试验分析,但存在边膜漏捡,膜、土分离差等问题。马少辉等[17]研制了一种结合后续其他机构回收残膜的边膜回收机,当机具作业农田土壤含水率过大时,土壤与边膜黏连,膜、土难以分离,导致卷膜辊易漏捡,边膜回收率低等问题。李辰等[18]设计了一种链齿式耕层残膜回收机,对机具捡拾机构进行了设计,主要存在残膜捡拾弹齿刮带地膜,卸膜困难,同时回收后的膜、土分离差等问题。王旭峰等[19]设计了一种包含起膜抛送、链齿输送、自动脱膜的抛膜链齿输送式残膜回收机,主要针对目前起膜装置出现的残膜缠绕工作部件、卸膜难等问题进行分析,该机具存在残膜含杂率高,回收率低等问题。
将掩埋于板结土壤下的边膜起出,翻至地表,利用捡拾机构回收边膜是提高残膜捡拾率的有效途径。目前残膜回收机具的研究主要集中在地表膜捡拾方面,对边膜捡拾和卸膜部分的研究存在不足[20]。如何破碎板结土壤实现膜、土分离,起出边膜并将捡拾的地膜完全卸入膜箱是继续提高残膜回收率的主要途径。针对以上问题,本团队设计了一种弧形齿滚扎式残膜回收机[21],通过分析起边膜装置、残膜捡拾机构、卸膜机构的功能及结构要求,确定各部分结构参数;借助响应面试验分析机具工作参数对起边膜率、残膜捡拾率、卸膜率的影响;建立回归方程,求取最优因素组合,为提高弧形齿滚扎式残膜回收机的残膜最终回收率奠定理论和试验基础[22]。
1 机具整体结构及工作原理
如图1所示,弧形齿滚扎式残膜回收机主要由机架、边膜铲、传动系统、弧形齿滚扎式捡拾机构、卸膜机构、集膜箱等组成。弧形齿滚扎式残膜回收机工作时由拖拉机牵引机具,在前进过程中,边膜铲与板结土壤接触挤压破碎板结土壤,同时将边膜起出,后部的弧形齿滚扎式残膜捡拾机构将中间地表膜与边膜一起扎起。未被扎起的残膜被搂膜弹齿搂起,再次被旋转的钉齿扎起。随着滚筒的滚动,钉齿带着残膜经过卸膜导板,残膜与卸膜导板摩擦接触刮掉地膜。刮板式脱膜辊转动,进而将堆积在卸膜导板上的地膜刮入集膜箱,完成残膜回收。
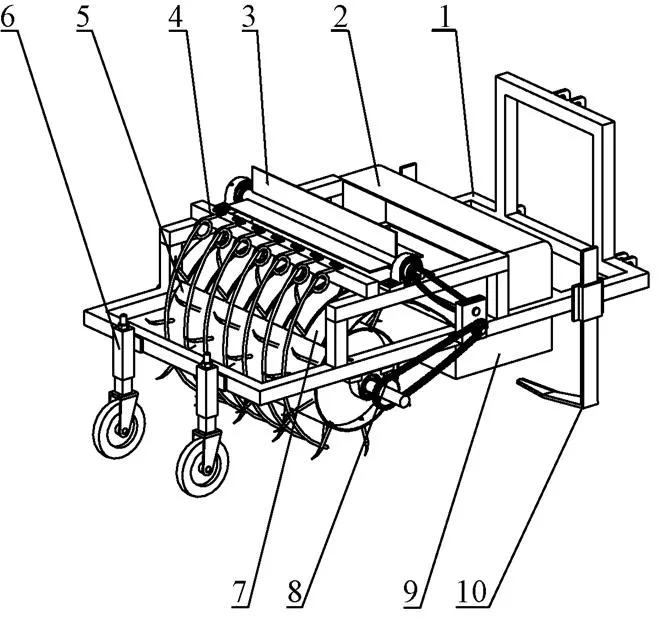
1.机架 2.集膜箱挡风罩 3.刮板式脱膜辊 4.搂膜弹齿 5.拾膜机构 6.限深轮 7.卸膜导板 8.链轮 9.集膜箱 10.边膜铲
1.Frame 2.Windshield of collecting film box 3.Scraper type stripping roller 4.Vibrator tooth for film picking 5.Pick-up residual film mechanism 6.Depth wheel 7.Unloading film guide plate 8.Sprocket 9.Collecting film box 10.Edge film shovel
图1 弧形齿滚扎式残膜回收机结构示意图
Fig.1 Structure diagram of arc tooth and rolling bundle type plastic film residue collector
2 关键部件设计
2.1 边膜铲的设计
由于边膜掩埋于板结土壤下,回收时易与地表膜撕裂,导致边膜回收困难[23]。对比圆盘、开沟器、双翼铲的碎土、起膜效果发现双翼铲碎土作业效果最佳,但是其对边膜抬升和起出效果不理想。因此,根据双翼铲的结构改进设计出了边膜铲,边膜铲的结构及受力如图2所示。为了破碎边膜位置的板结土壤,减少边膜的破损并完整的起出边膜,同时考虑减少膜下土壤扰动,减小土壤阻力,避免将土壤翻耕到地膜上,翻起的地膜由铲翼前端将边膜抬升一定角度以便捡拾机构回收边膜。所以,边膜铲铲翼与铲柄夹角及铲翼与水平面夹角的选择尤为重要。
边膜铲水平方向(前进方向)平衡方程为

式中为土壤摩擦系数,取值为0.21

1.铲柄 2 铲翼 3.铲尖
1.Shovel handle 2.Shovel wing 3.Shovel tip
注:为边膜铲受到的拉力,N;01为边膜铲铲翼和铲尖上表面受到土壤的正压力,N;为边膜铲铲翼切土阻力(=,N;为边膜铲铲翼的刃宽,mm;为单位刃宽上的刃切阻力,N;0、1为土壤与边膜铲铲翼的摩擦力,N;为铲翼与铲柄夹角,(°);为铲翼与水平面夹角,(°);为铲尖与水平面夹角,(°);为铲翼后倾角,(°)。
Note:is the pull force on edge film shovel, N;0and1are the positive pressures of the soil on the wing and upper surface of the tip of the edge film shovel, N;is the blade cutting resistance of the edge film shovel wine (,N;is the wing width of edge film shovel, mm;is the cutting resistance on unit blade width, N;01are the frictions between soil and edge film shovel wing, N;is the angle between the shovel wing and the shovel handle, (°);is the angle between shovel wing and the ground, (°);is the angle between shovel tip and horizontal plane, (°);is the caster angle of the shovel wine, (°).
图2 边膜铲结构及受力分析
Fig.2 Structure and force analysis of edge film shovel
2.2 弧形齿滚扎式拾膜机构的设计
拾膜机构是机具关键部件之一[24-25],该机构的可靠性和作业效果决定了机具工作的性能。为了解决地头地膜被板结土壤覆盖导致钉齿无法自动上膜和拾膜钉齿作业过程中漏捡问题,在拾膜滚筒外后侧增加一排弹齿,构成弧形齿滚扎式拾膜机构,其结构如图3a所示,主要由主轴、滚筒、钉齿、搂膜弹齿等组成。拾膜滚筒运动一周工作面积为1×2,相邻两钉齿横向距离为,纵向距离为,钉齿排布如图3b所示[26]。根据新疆白萝卜种植模式和避免机具总体质量过大,同时考虑避免机具漏捡残膜等因素,机具作业幅宽为800 mm,滚筒半径为350 mm,钉齿采用交错法排列于滚筒上。由于捡拾残膜采用扎膜方式,同时考虑减小钉齿入土阻力,对比圆头直杆齿、尖头直杆齿和带弧度尖头齿,选用带有弯度的尖头钉齿,具体结构如图4所示。并且,为了方便更换钉齿,将钉齿根部做成螺纹,安装于焊接在滚筒上的螺母内。
图4中钉齿总长3取值为137mm,钉齿杆长度4取值为90mm,螺纹长度5为25mm,钉齿直径取值为16mm,钉齿弯曲角度o取值为10°。
拖拉机带动机具工作时,捡拾滚筒与土壤相互作用产生自身的圆周运动。钉齿捡拾地膜过程可以分为扎膜和挑膜过程,钉齿随滚筒转动深入土壤捡拾地膜,钉齿入土过程中主要承受土壤的阻力,拾膜机构的运动速度影响机具的拾膜效果。当钉齿入土速度过快时,冲击力较大,钉齿容易发生变形,同时由于残地膜力学性能下降,钉齿运动过快会将地膜贯穿撕成条状,导致残膜无法捡拾;当拾膜钉齿入土速度较慢时,地膜无法被钉齿挑起,导致残膜漏捡严重。为确定滚筒上钉齿较为合理的布置参数,同时探明钉齿的运动规律避免钉齿对地膜的二次损伤,提高残膜捡拾率,对钉齿拾膜过程进行分析[27-28]。弧形齿滚扎式残膜捡拾机构在拾膜过程中钉齿滚筒与地面的相对运动可以看作齿条与齿轮的啮合运动[29]。为减少残膜漏捡,任意一钉齿离开土壤时,其相邻的下一个钉齿应进入土壤开始扎膜,拾膜钉齿运动轨迹如图5a所示。
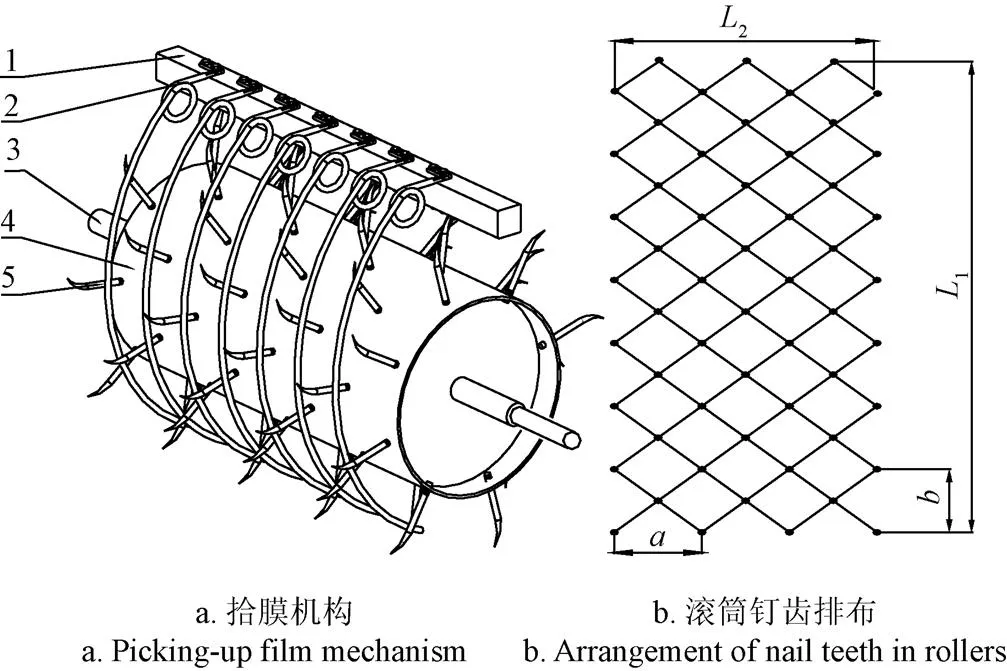
1.弹齿固定梁 2.搂膜弹齿 3.主轴 4.滚筒 5.钉齿
1.Spring teeth fixing beam 2.Cuddle film spring teeth 3.Spindle 4. Rollers 5. Nail teeth
注:1为滚筒轴向距离,mm;2滚筒周向展开距离,mm;为周向相邻钉齿距离,mm;为轴向相邻钉齿距离,mm
Note:1is the axial distance of rollers, mm;2is the circumferential spreading distance of rollers, mm;is the distance of circumferential adjacent nail teeth, mm;is the distance of axial adjacent nail teeth, mm.
图3 拾膜机构及钉齿排布结构示意图
Fig.3 Structure diagram of picking-up film mechanism and nail teeth arrangement
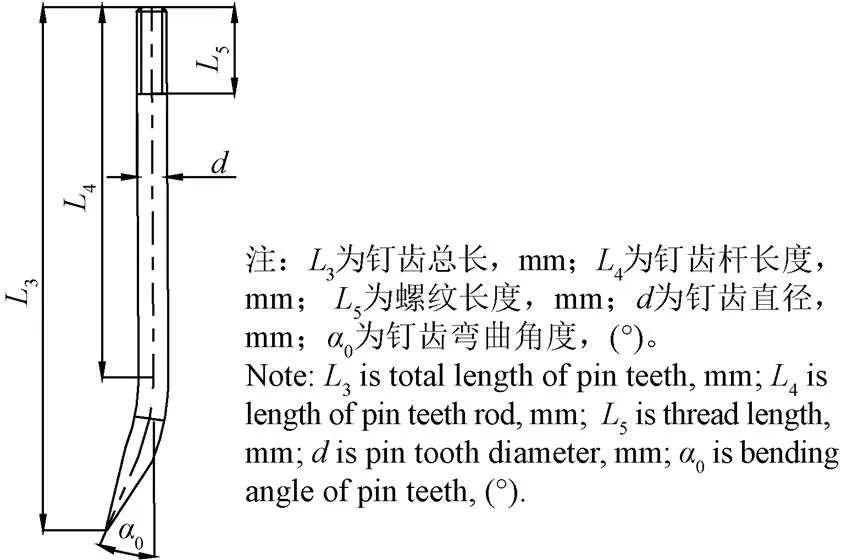
图4 钉齿结构

钉齿处于点时,与轴夹角为1,此时为拾膜起始位置,机具工作/2时,钉齿绕轴心转动/2到达1点,滚筒作业距离为/2。钉齿入土扎膜轨迹方程为
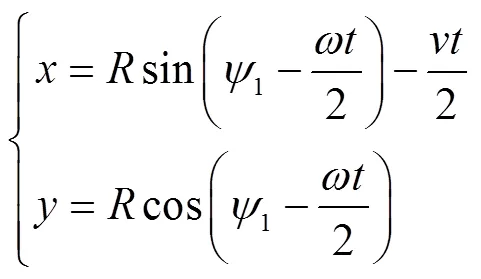
注:为时间,s;为滚筒旋转角速度,rad·s-1;为机具行进速度,m·s-1;1为初始相位角,(°);为钉齿入土深度,mm;1为周向相邻钉齿夹角,(°);为钉齿末端至滚筒中心距离,mm。
Note:is the time, s;is the rotation angular velocity of the rollers, rad·s-1;is the machine advancing velocity, m·s-1;1is the preliminary phase angle, (°);is the penetration depth of nail teeth, mm;1is the angle of circumferential adjacent nail teeth, (°);is the distance from end of nail teeth to center of rollers, mm.
图5 拾膜机构的运动分析
Fig.5 Motion analysis of picking-up film mechanism
对时间进行一阶、二阶求导得到钉齿末端的速度及加速度为
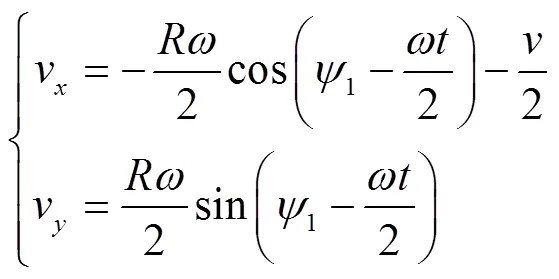
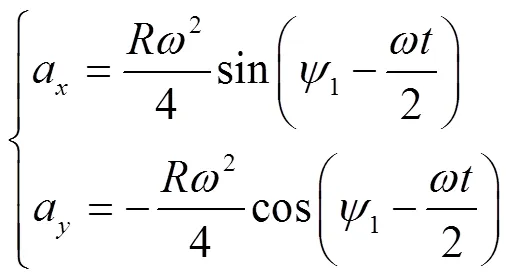
则钉齿末端运动的速度及加速度
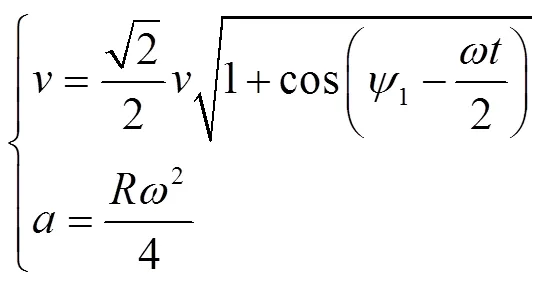
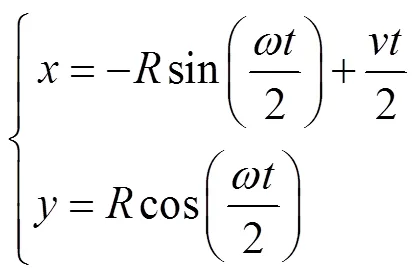
钉齿入土完成扎膜,滚筒继续作业,钉齿末端由1点运动到2点完成挑膜,其运动轨迹为
对时间进行一阶、二阶求导得到钉齿末端的速度及加速度为

则钉齿末端运动的速度及加速度

由图5可知

为了保证捡拾机构不漏捡,则钉齿末端所处点水平位移与竖直位移应为

将式(9)和式(10)带入式(8),求得
由式(11)得
整理得
由以上分析可知,只有当钉齿末端至滚筒中心距离、钉齿入土深度、同一圆周上钉齿总数、滚筒旋转角速度满足以上关系时,残膜拾膜机构作业轨迹如图5a所示,实现连续捡膜。
根据秋后残膜回收机具作业要求,机具行进速度为2.4~4.8 km/h,钉齿末端距离滚筒回收机中心旋转半径为480 mm,钉齿入土深度为50 mm,通过对钉齿运动轨迹分析,满足式(12)、式(13)的要求,滚筒旋转角速度为1.39~2.78 rad/s,得到钉齿滚筒周向齿数为8个。考虑防止漏捡且便于卸膜,取轴向间距为200 mm,所以拾膜滚筒钉齿数量为64个。
2.3 卸膜机构的设计
为了脱卸拾膜钉齿捡拾的地膜,针对弧形齿滚扎式拾膜机构的结构特点,参考文献“链条导轨式地膜回收机”的卸膜装置[30],其运用环形导轨脱卸残膜,残膜在重力和卸膜叶轮的作用下被送进集膜箱,设计了一种刮膜导板式卸膜机构。卸膜机构主要由卸膜导板和刮板式脱膜辊组成,其结构及位置关系如图6所示,卸膜导板由弧形钢板和尼龙胶板铆合组成。
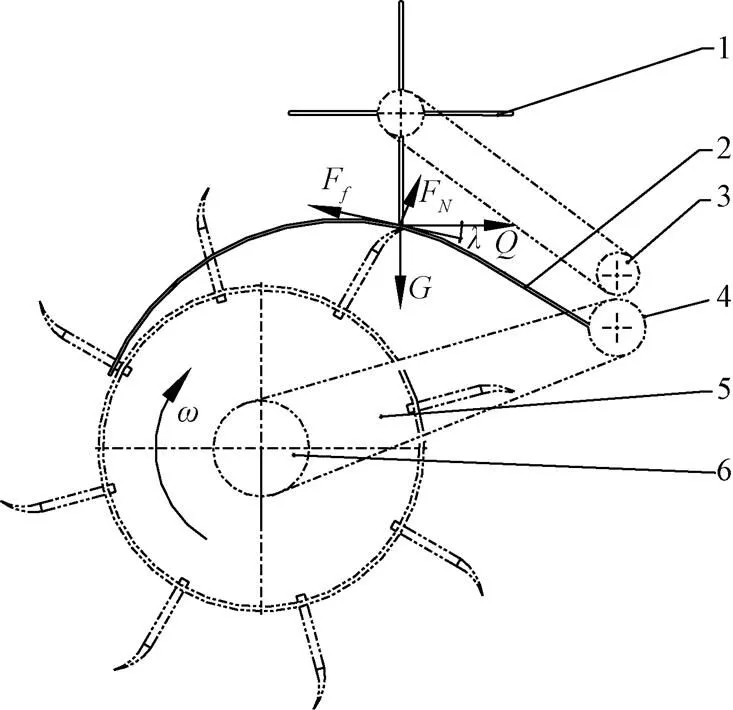
1.刮板式脱膜辊 2.卸膜导板 3.换向齿轮 4.传动链条 5.拾膜机构 6.链轮
1.Scraper stripping roller 2. Unloading film guide plate 3.Commutation gears 4.Driving chain 5.Picking-up film mechanism 6.Sprocket
注:为地膜自身重力,N;F为卸膜导板的支撑力,N;为刮板式脱膜辊的作用力,N;F为地膜与卸膜导板之间的摩擦力,N;为地膜所受力与卸膜导板之间的夹角,(°)。
Note:is the gravity of plastic film, N;Fis the supporting force of unloading film guide plate, N;is the force of scraper stripping roller, N;Fis the friction between plastic film and unloading film guide plate, N;is the angle between the force acting on the plastic film and the unloading film guide plate, (°).
图6 卸膜过程中残膜受力分析
Fig.6 Force analysis of plastic film residue during unloading film process
机具工作时,随弧形齿滚扎式拾膜机构的滚动,通过链传动经换向齿轮带动刮板式脱膜辊转动,当拾膜钉齿捡拾残膜运动到与卸膜导板接触位置,卸膜导板铆合的尼龙胶板从钉齿根部到钉齿末端将地膜捋下,卸在卸膜导板上,再由刮板式脱膜辊将地膜刮进集膜箱。为了尽可能的将残膜刮进集膜箱[31-32],相邻两钉齿离开卸膜导板至少被卸膜刮板刮捋2次,选取滚筒与刮板式脱膜辊速比为1:4。
残膜的受力简图如图6所示,在卸膜过程中,由于地膜与卸膜导板、刮板式脱膜辊的静电吸附等力太小,可忽略不计[33]。卸膜过程中,刮板式脱膜辊与卸膜导板相对运动时,地膜受力平衡条件为

式中m为卸膜导板堆积的残膜质量,g;1为地膜的瞬时加速度,m/s2;为刮板式脱膜辊瞬时旋转半径,mm;1为刮板式脱膜辊的角速度,rad/s;1为卸膜导板与地膜之间的摩擦系数。
则地膜被刮板式脱膜辊从刮膜导板上刮下卸进集膜箱须满足受力为

在卸膜过程中,尽量避免刮板式脱膜辊将地膜拉扯断裂及撕裂,所以刮板式脱膜辊对地膜的作用力应当小于地膜的抗拉强度,即

由式(15)和(16)可知

刮板式脱膜辊的瞬时角速度取值范围

式中为卸膜导板上堆积残膜的截面面积,mm2;[]为地膜的许用拉应力,Pa。
3 弧形齿滚扎式残膜捡拾机构的仿真分析
捡拾机构是弧形齿滚扎式残膜回收机的关键部件,其结构强度和可靠性直接影响机具性能;同时在机具实际作业过程中无法直接观测到拾膜钉齿扎膜以及钉齿、地膜和土壤的形变情况。依据残膜力学性能,对拾膜机构进行非线性有限元动力学仿真分析,通过建立拾膜机构、地膜-土壤的有限元复合模型,观测地膜和土壤受到拾膜钉齿作用后,拾膜钉齿、地膜、土壤具体变形及应力情况,增加机具的可靠性和确定拾膜机构的结构(包括钉齿形状及尺寸),从而指导整机的加工制造。
机具在实际作业过程中,由于土壤阻力和作物残茬作用,容易造成钉齿损坏变形,导致机具可靠性降低。依据地膜力学特性,通过构建残膜捡拾机构、土壤、地膜的复合模型,运用ANSYS Workbench对残膜捡拾机构捡拾地膜过程进行非线性动力学分析,对钉齿捡拾地膜进行仿真,获得钉齿、地膜、土壤的变形及受力情况,有限元复合模型如图7所示。考虑到残膜捡拾机构结构的对称性,且整体建模耗费计算资源过大,所以在仿真软件中将残膜捡拾机构的捡拾地膜过程简化成单个钉齿绕滚筒中心端点旋转,单个钉齿所作用土壤-地膜复合模型大小为500 mm×300 mm×100 mm,地膜厚度取0.010 mm。

1.残膜捡拾机构 2.地膜 3.土壤
1.Plastic film residue picking mechanism 2.Plastic film 3. Soil
图7 残膜捡拾机构有限元复合模型
Fig.7 Finite element compound model of plastic film residue picking mechanism
3.1 参数设置
钉齿材料为热处理过的45钢,硬度值为HRC55密度为7 850 kg/m3,弹性模量为2.10×1011Pa,泊松比为0.31。地膜的密度为0.92×103kg/m3,弹性模量为0.6×106Pa,泊松比为0.34。土壤的密度为2 600 kg/m3,黏聚力为2 200 Pa,内摩擦角22°,体积模量1 756 Pa,剪切模量为5 858 Pa,含水率为22%[34]。由于地膜厚度较小,所以采用Shell181壳体单元,其余部件使用Solid164实体单元。
根据平作种植模式及拾膜机构的分析,机具行进速度为4.0 km/h,计算拾膜滚筒旋转角速度为3.8 rad/s,钉齿从入土扎膜到出土挑膜作用时间为0.3 s,设定钉齿入土深度为55 mm,钉齿与地膜采用Separation接触方式,而地膜和土壤采用Rough接触方式,土壤四周施加固定约束。
3.2 仿真结果分析
通过ANSYS Workbench对捡拾机构捡拾地膜过程进行分析,钉齿的变形和应力情况如图8所示。

图8 钉齿的变形、应力分析
在钉齿入土扎膜、挑膜过程中,钉齿末端变形最大,钉齿根部应力最大,最大变形量为6.30 mm,最大应力为1.08×105Pa。由于地膜受到钉齿作用产生变形吸附包裹钉齿,随钉齿一起向前运动,导致地膜在钉齿末端与地膜接触位置发生较大变形。同时地膜和板结覆土粘结,在入土拾膜过程中,部分土壤会随地膜一起向前运动一段距离,导致其变形扰动较大。
4 田间试验
4.1 试验条件
为得到弧形齿滚扎式残膜回收机最优作业参数组合,进行田间试验。2018年7月试验在石河子市145团科神农业装备科技开发有限公司试验地进行。试验田根据新疆白萝卜平作种植模式铺设厚度为0.010 mm的地膜,幅宽800 mm,边膜宽度为80 mm,覆膜时间为2018年4月-2018年7月,自然板结。土壤紧实度为41 kg/cm2,含水率为16.7%~22.1%。样机田间试验如图9所示,机具由约翰迪尔404牵引机具作业。

图9 田间试验
4.2 试验因素确定
通过前期机具的单因素试验,依据弧形齿滚扎式残膜回收机结构及工作原理,选取影响机具回收率的3个主要因素为:机具行进速度1、边膜铲铲翼与铲柄夹角2和钉齿入土深度3。根据新疆秋后残膜回收机工作要求,试验将机具行进速度设定为2.4~4.8 km/h,边膜铲翼与铲柄夹角设定范围为90°~135°,钉齿入土深度设定范围为30~90 mm之间。
4.3 试验指标确定
在残膜回收过程中边膜的起出有利于残膜的捡拾,而捡拾膜率和卸膜率直接反映机具工作性能和工作效果。故试验指标为起边膜率1、残膜捡拾率2、卸膜率3,分别表示为
式中1为当年所铺设边膜质量,g;2为起膜装置工作后翻起边膜质量,g;m为当年每组试验铺设地膜的质量,g;m为被钉齿捡拾回收但未被卸入集膜箱残膜质量,g;m为被卸入集膜箱残膜的质量,g。
4.4 试验方案
在试验地里随机选取长17个机具行进有效长度为20 m的测试区,每个测试区内随机选取长200 mm,宽80 mm的边膜监测点,然后机具进行回收作业。每次试验结束后将各组检测点翻起的边膜、残膜捡拾机构捡拾的残膜和被卸入集膜箱的残膜进行人工收集标记,回收的残膜洗净晒干后由FA2014N电子天平称其质量分别为c、m、m,利用式(18)、(19)、(20)计算起边膜率、残膜捡拾率、卸膜率。
残膜回收过程中存在很多非线性因素影响机具的试验指标,一般需要选用二次或高次的模型逼近响应,本次试验选取响应面来建立模型[35]。试验利用Box-Benhnken试验设计方法,选取自变量为机具行进速度、边膜铲翼与铲柄夹角、钉齿入土深度。各因素水平如表1所示,试验结果如表2所示。
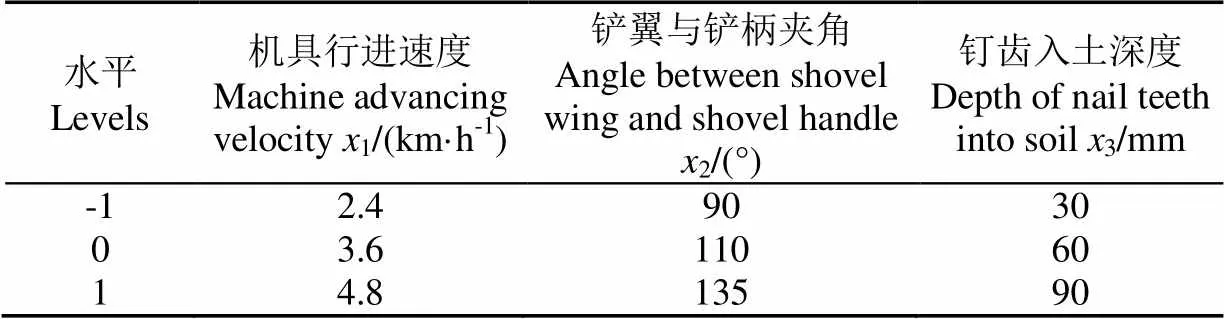
表1 试验因素与水平
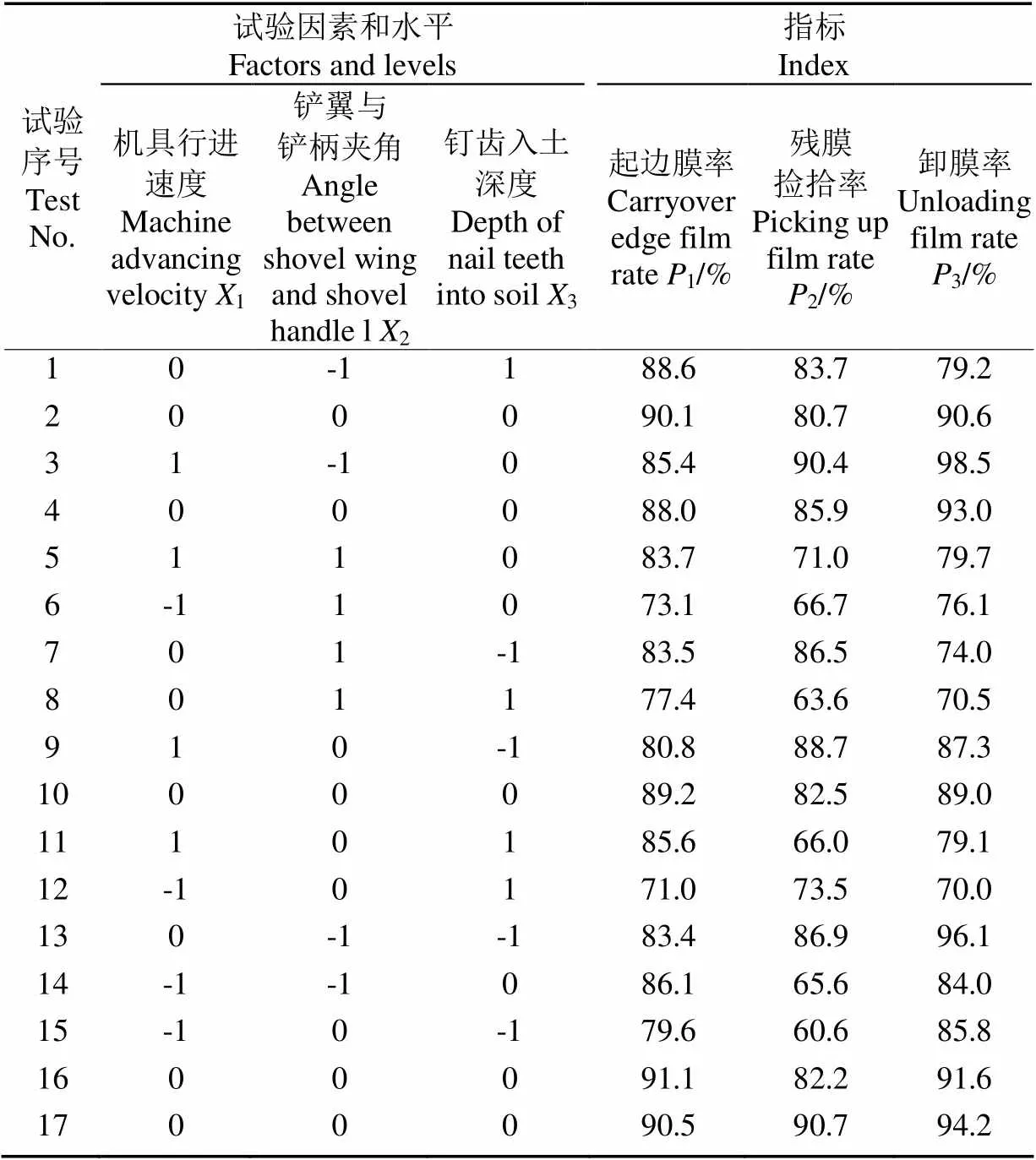
表2 试验方案与结果
5 试验结果分析及优化
5.1 回归模型的建立与检验
使用Design-Expert软件对表2进行数据分析处理,结果如表3所示。根据表3中起边膜率、残膜捡拾率和卸膜率的值和失拟值,说明起边膜率、残膜捡拾率和卸膜率的回归模型与实际情况拟合精度很高,田间试验具有很好的实际研究意义。
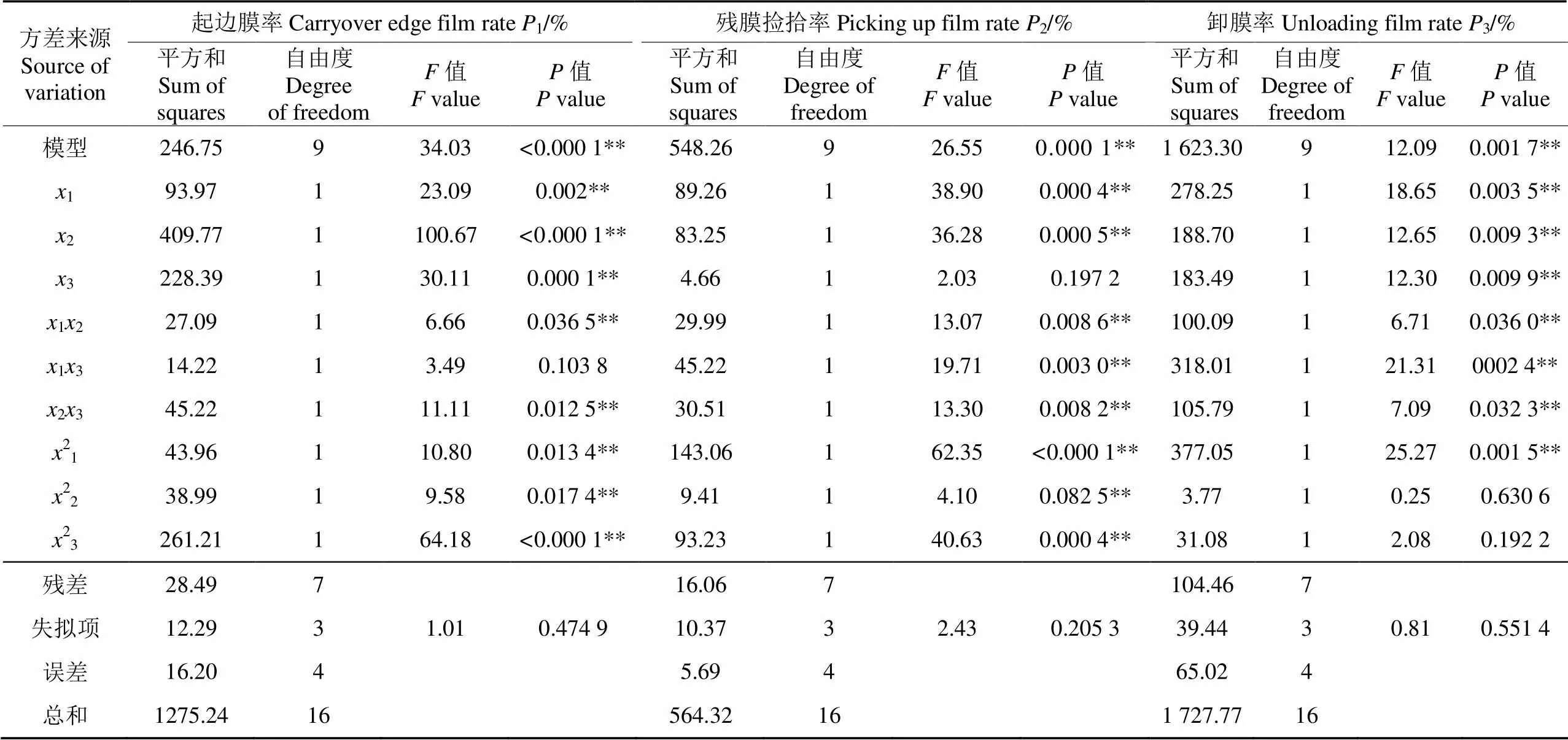
表3 试验分析结果
注:<0.01为极显著(**),<0.05为显著(*)。
Note:<0.01: highly significant (**),<0.05: significant (*).
观察表3二次项212223和121323显著性,说明所选的3个因素与起边膜率、残膜捡拾率、卸膜率之间存在二次非线性关系和交互作用。建立起边膜率1、残膜捡拾率2、卸膜率3对机具行进速度1、边膜铲铲翼与铲柄夹角2、钉齿入土深度33个自变量的响应面二次多项式回归模型。
通过上述分析,将不显著因素剔除得到各因素的回归方程



式中1为机具行进速度,km/h;2为边膜铲铲翼与铲柄夹角,(°);3为钉齿入土深度,mm。
5.2 影响因素对性能效应影响分析
各单因素对模型的影响程度可以由贡献率值的大小来体现[22],值越大,单因素对模型的影响越大,其计算式为(24)和(25),各因素对边膜起膜率贡献率为:边膜铲铲翼与铲柄之间的夹角>钉齿入土深度>机具行进速度;各因素对残膜捡拾率贡献率大小为:机具行进速度>边膜铲铲翼与铲柄之间的夹角>钉齿入土深度;各因素对卸膜率贡献率为:机具行进速度>钉齿入土深度>边膜铲铲翼与铲柄之间的夹角;分析结果如表4所示。




表4 各影响因素贡献率分析
5.3 各交互因素对性能影响规律分析
机具回收残膜时,主要通过检测机具的残膜捡拾率和卸膜率判定机具总体残膜捡拾率,所以本文使用Design-Expert软件绘制响应面图,对影响残膜捡拾率和卸膜率的机具行进速度、边膜铲铲翼与铲柄之间的夹角和钉齿入土深度进行分析,如图10所示。
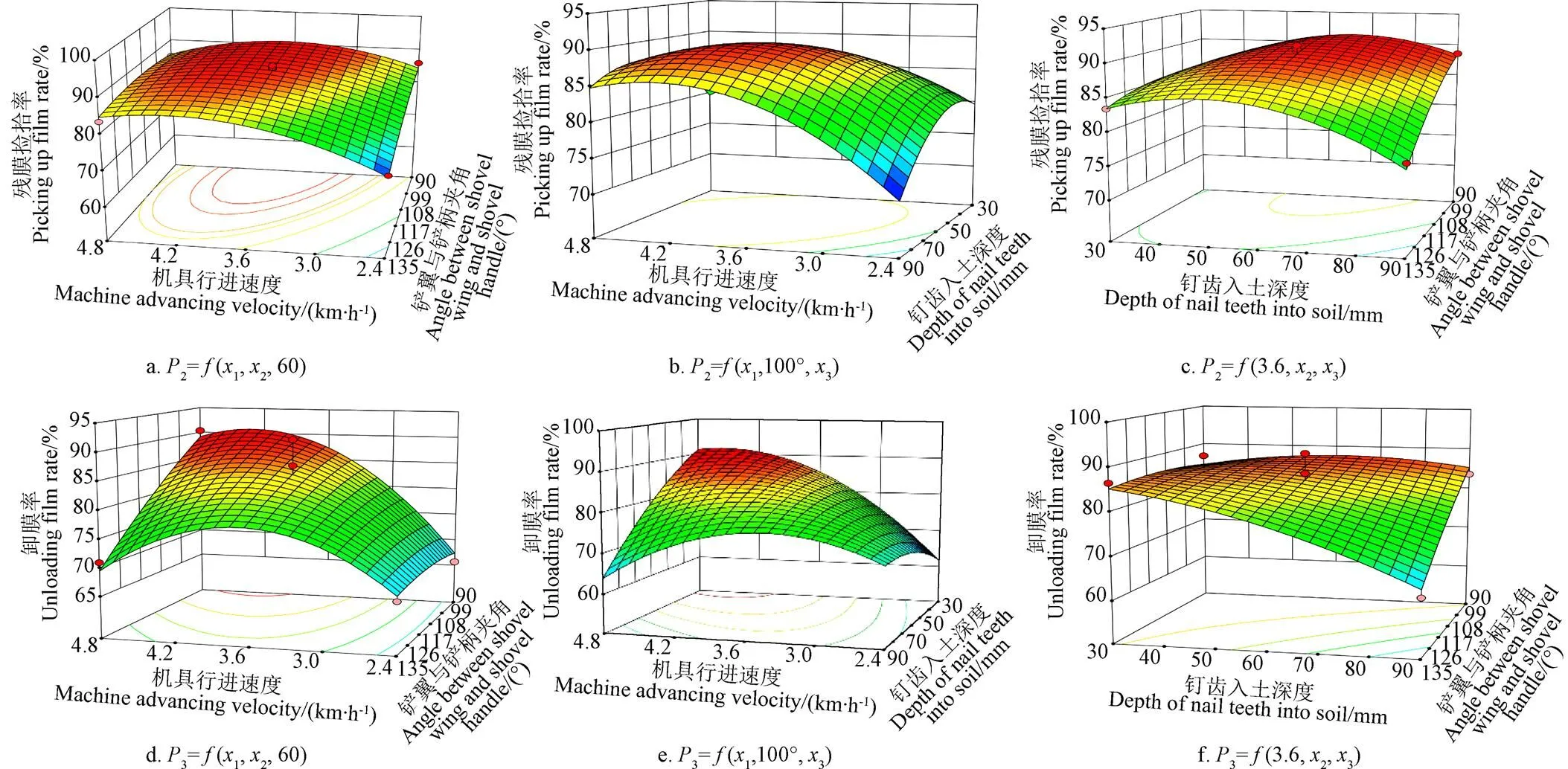
图10 交互因素对残膜捡拾率、卸膜率的影响
1)因素交互作用对残膜捡拾率的影响
各因素交互作用对残膜捡拾率影响的响应面曲线如图10a~10c所示。图10a为钉齿入土深度位于中心水平(60 mm)时,机具行进速度与边膜铲铲翼与铲柄夹角交互作用对残膜捡拾率2的响应面图,由图10a可知机具行进速度和边膜铲铲柄与铲翼夹角交互影响,残膜捡拾率先增大后减小。残膜捡拾率随着机具行进速度增大先增大后减小,随着边膜铲铲翼与铲柄夹角减小而增大,机具行进速度对残膜捡拾率的影响更显著;图10b为边膜铲翼与铲柄夹角为中心水平(110°)时,机具行进速度与钉齿入土深度交互作用对残膜捡拾率2的响应面图,由图10b可知机具行进速度与钉齿入土深度交互作用,残膜捡拾率先增大后减小。残膜捡拾率随机具行进速度的增加先增大后减小,随钉齿入土深度的增加先增大后减小,机具行进速度对残膜捡拾率的影响更显著;图10c为机具行进速度为中心水平(3.6 km/h)时,边膜铲铲翼与铲柄夹角和钉齿入土深度交互作用对残膜捡拾率2的响应面图,由图10c可知钉齿入土深度和边膜铲铲柄与铲翼夹角交互影响,残膜捡拾率先增大后减小。残膜捡拾率随钉齿入土深度的增大先增大后减小,随边膜铲铲柄与铲翼夹角的减小而增大。边膜铲铲翼与铲柄夹角对残膜捡拾率的影响更显著。
从各因素对响应值2响应图10a~10c可知,因素影响响应面变化规律与模型(22)及回归方程方差分析结果一致,影响总体的大致趋势为机具行进速度越大、边膜铲铲翼与铲柄夹角越小、钉齿入土深度越大则残膜捡拾率越高。分析其主要原因为:机具行进速度越快,同一圆周上相邻钉齿运动重叠度越高,可以避免漏捡残膜;边膜铲与铲柄夹角越小,边膜铲在起边膜过程中将边膜翻至地表时翻带的土壤越少,越有利于钉齿捡拾;钉齿入土深度越深,钉齿钩捡残膜的时间越长,但入土深度也不易过深,因为过深土壤对钉齿阻力太大,容易损伤钉齿,给卸膜带来困难。
2)因素交互作用对卸膜率的影响
各因素交互作用对卸膜率影响的响应面曲线如图10d-10f所示。图10d为钉齿入土深度位于中心水平(60 mm)时,机具行进速度与边膜铲铲翼与铲柄夹角交互作用对卸膜率3的响应面图,由图10d可知机具行进速度与边膜铲铲柄夹角交互作用卸膜率先增大后趋于稳定。卸膜率随机具行进速度增大先增大后减小,随边膜铲铲翼与铲柄夹角减小而增加,机具行进速度对卸膜率影响更显著;图10e为边膜铲翼与铲柄夹角为中心水平(110°)时,机具行进速度与钉齿入土深度交互作用对卸膜率3的响应面图,由图10e可知机具行进速度与钉齿入土深度交互作用卸膜率增大。卸膜率随机具行进速度的增大先增大后减小,随钉齿入土深度的增大先增大后稳定,机具行进速度对卸膜率的影响更显著;图10f为机具行进速度为中心水平(3.6 km/h)时,边膜铲铲翼与铲柄夹角和钉齿入土深度交互作用对卸膜率3的响应面图,由图10f可知边膜铲铲翼与铲柄夹角和钉齿入土深度交互作用残膜捡拾率先增大后减小,卸膜率随着钉齿入土深度的增大而减小,随边膜铲铲柄与铲翼夹角的减小而增大。钉齿入土深度对卸膜率的影响更显著。
从各因素对响应值3响应图10d-10f可知,因素影响响应面变化规律与模型(23)及回归方程方差分析结果一致,影响总体的大致趋势为机具行进速度越高、钉齿入土深度越小、边膜铲铲翼与铲柄夹角越小则卸膜率越高。分析其主要原因为:机具行进速度越高滚筒运动越快通过传动机构带动刮板式脱膜辊运动越快,单位时间内卸膜导板和刮板式脱膜辊剐蹭残膜次数越多越有利于卸膜。钉齿入土深度越浅,被捡拾的残膜位于钉齿越上端,越有利于卸膜导板的剐蹭越有利于卸膜。边膜铲铲翼与铲柄夹角越小,翻带土壤越少,防止过度土壤堆积在已捡拾地膜,避免捡拾的地膜过重,导致无法被卸载。
5.4 参数优化及试验验证
起出边膜、捡拾地膜和卸膜都是机具作业的重要环节,起边膜率、残膜捡拾率和卸膜率都是反映机具回收残膜的重要指标,所以要求其值越高越好。考虑边膜起出、地膜捡拾和地膜脱卸是本机具工作过程的前后连续的3个阶段,3个试验指标对机具整体残膜回收率影响均等[36],故起边膜率、残膜捡拾率、卸膜率各占1/3权重。应用Design-Expert软件的寻优功能,对起边膜率、残膜捡拾率、卸膜率影响因素进行寻优,得到最优参数为:机具行进速度4.0 km/h、边膜铲铲翼与铲柄夹角90°、钉齿入土深度55 mm时,起边膜率为97%、残膜捡拾率为90%、卸膜率为91%。
为验证优化后影响因素的效果,采用机具行进速度为4.0 km/h、边膜铲铲翼与铲柄夹角为90°和钉齿入土深度为55 mm的优化参数值,在石河子市145团科神农业装备科技开发有限公司试验地进行试验,试验重复3次,依据式(18)、(19)和(20)进行计算,得到起边膜率93.5%、残膜捡拾率为87.4%和卸膜率87.1%。与起边膜率97%、残膜捡拾率90%、卸膜率91%的理论值相比,相对误差均小于4个百分点,所以参数优化模型可靠。
6 结 论
1)针对现有残膜回收机具存在可靠性差、边膜回收率低、卸膜困难等问题,设计一种弧形齿滚扎式残膜回收机具。主要包括边膜铲、搂膜弧齿滚扎捡拾机构、卸膜机构、集膜箱等组成,通过对边膜铲受力、拾膜机构运动轨迹及卸膜机构的设计分析,确定各组成部分结构参数。
2)采用Box-Benhnken中心组合试验方法对机具行进速度、边膜铲铲翼与铲柄夹角、钉齿入土深度对起边膜率、残膜捡拾率、卸膜率的影响进行分析,建立了以起边膜率、残膜捡拾率、卸膜率为响应指标的回归方程。通过对响应曲面和因素交互作用对模型的影响得出了起边膜率、残膜捡拾率、卸膜率与机具行进速度、边膜铲铲翼与铲柄夹角、钉齿入土深度之间的变化规律。各因素对起边膜率的影响大小为:边膜铲铲翼与铲柄夹角>钉齿入土深度>机具行进速度;各因素对残膜捡拾率的影响大小为:机具行进速度>边膜铲铲翼与铲柄夹角>钉齿入土深度;各因素对卸膜率的影响大小为:机具行进速度>钉齿入土深度>边膜铲铲翼与铲柄夹角。
3)对起边膜率、残膜捡拾率、卸膜率的回归方程进行优化求解,最佳参数为:机具行进速度为4.0 km/h、边膜铲铲翼与铲柄夹角为90°和钉齿入土深度为55 mm。在该条件下进行田间试验,试验结果为起边膜率93.5%,残膜捡拾率为87.4%,卸膜率87.1%。各理论优化值与试验值均较吻合,相对误差均小于4个百分点,所以参数优化模型可靠。
[1] 谢建华,侯书林,付宇,等. 残膜回收机弹齿式拾膜机构运动分析与试验[J]. 农业机械学报,2013,44(增刊1):94-99.
Xie Jianhua, Hou Shulin, Fu Yu, et al. Motion analysis and experiment on spring-tooth mulching plastic film collector[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 94-99. (in Chinese with English abstract)
[2] 毕继业,王秀芬,朱道林. 地膜覆盖对农作物产量的影响[J]. 农业工程学报,2008,24(11):172-175.
Bi Jiye, Wang Xiufen, Zhu Daolin. Effect of plastic-film mulch on crop yield[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(11): 172-175. (in Chinese with English abstract)
[3] 侯书林,胡三媛,孔建铭,等. 国内残膜回收机研究的现状[J]. 农业工程学报,2002,18(3):186-190.
Hou Shulin, Hu Sanyuan, Kong Jianming, et al. Present situation of research on plastic film residue collector in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2002, 18(3): 186-190. (in Chinese with English abstract)
[4] 王频. 残膜污染治理的对策和措施[J]. 农业工程学报,1998,14(3):190-193.
Wang Pin. Measures to reduce the pollution of residual of mulching plastic film in farmland[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1998, 14(3): 190-193. (in Chinese with English abstract)
[5] 刘艳霞. 中国农村地膜残留污染现状及治理对策思考[D].咸阳:西北农林科技大学,2014.
Liu Yanxia. Reflections on the pollution status and control countermeasures of plastic film residuals in Chinese rura areas[D]. Xianyang: Northwest A&F University, 2014. (in Chinese with English abstract)
[6] 肖军,赵景波. 农田塑料地膜污染及防治[J]. 四川环境,2005,24(1):102-105.
Xiao Jun, Zhao Jingbo. Farmland plastic film pollution and its countermeasures[J]. Sichuan Environment, 2005, 24(1): 102-105. (in Chinese with English abstract)
[7] 张东兴. 农用残膜的回收问题[J]. 中国农业大学学报,1998,3(6):103-106.
Zhang Dongxing. Study on collection of used plastic film in fields[J]. Journal of China Agricultural University, 1998, 3(6): 103-106. (in Chinese with English abstract)
[8] 李斌,王吉奎,胡凯,等. 残膜回收机顺向脱膜机理分析与试验[J]. 农业工程学报,2012,28(21):23-28.
Li Bin, Wang Jikui, Hu Kai, et al. Analysis and test of forward film removing mechanism for polythene film collector[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2012, 28(21): 23-28.(in Chinese with English abstract)
[9] 陈发,史建新,王学农,等. 弧型齿残膜捡拾滚筒捡膜的机理[J]. 农业机械学报,2006,37(6):36-41.
Chen Fa, Shi Jianxin, Wang Xuenong, et al. Study on collecting principle of arc-type tooth roller for collectig plastic residue[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(6): 36-41. (in Chinese with English abstract)
[10] 张新超,毕新胜,王志欢,等. 钉齿滚筒式残膜回收机关键部件的设计与研究[J]. 农机化研究,2017,39(10):72-76.
Zhang Xinchao, Bi Xinsheng, Wang Zhihuan, et al. The design of key-parts of spiked tooth plastic film residue recovery[J]. Journal of Agricultural Mechanization Research, 2017, 39(10): 72-76. (in Chinese with English abstract)
[11] 谢建华,侯书林,刘英超. 残膜清理回收机具的研究现状及存在的问题[J]. 中国农机化,2012(5):41-44.
Xie Jianhua, Hou Shulin, Liu Yingchao. Research status and trends of plastic film residue collectors[J]. Chinese Agricultural Mechanization, 2012(5): 41-44. (in Chinese with English abstract)
[12] 张佳喜,王学农,张丽,等. 农田地膜拉伸性能变化对缠绕式回收的影响[J]. 农业工程学报,2015,31(20):41-47.
Zhang Jiaxi, Wang Xuenong, Zhang Li, et al. Effects of mechanical tensile properties of plastic film on plastic recycling method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(20): 41-47. (in Chinese with English abstract)
[13] 孙兴冻,陈玉龙,罗昕,等. 针对秋后立秆模式的残膜回收机的设计[J]. 农机化研究,2015,37(9):73-76.
Sun Xingdong, ChenYulong, Luo Xin, et al. Design and resarch of plastic film residue collector used on vertical stem after autumn[J]. Journal of Agricultural Mechanization Research, 2015, 37(9): 73-76. (in Chinese with English abstract)
[14] 张佳喜,张丽,刘旋峰,等. 不同边膜铲起膜性能分析及其起膜率对比试验[J]. 农业工程学报,2017,33(4):10-15.
Zhang Jiaxi, Zhang Li, Liu Xuanfeng, et al. Mechanical analysis and conterast experiment on collecting residual plastic film with different side-film shovels[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(4): 10-15. (in Chinese with English abstract)
[15] 王吉奎,付威,王卫兵,等. SMS-1500型秸秆粉碎与残膜回收机的设计[J]. 农业工程学报,2011,27(7):168-172.
Wang Jikui, Fu Wei, Wang Weibing, et al. Design of SMS-1500 type straw chopping and plastic film residue collecting machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 168-172. (in Chinese with English abstract)
[16] 康建明,王士国,颜利民,等. 残膜回收机起膜铲设计与试验[J]. 农业机械学报,2016,47(增刊1):143-148.
Kang Jianming, Wang Shiguo, Yan Limin, et al. Design and experimet of loose shovel installed on plastic film collecting machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(Supp.1): 143-148. (in Chinese with English abstract)
[17] 马少辉,张学军. 边膜残膜回收机的设计与试验[J]. 农业工程,2012,2(1):73-75.
Ma Shaohui, Zhang Xuejun. Design and experiment of side of used plastic film collector machine[J]. Agricultural Engineering, 2012, 2(1): 73-75. (in Chinese with English abstract)
[18] 李辰,白圣贺,靳伟. 链齿式耕层残膜回收机捡拾机构设计与试验[J]. 农机化研究,2019,41(4):107-111.
Li Chen, Bai Shenghe, Jin Wei. Design and experiment on picking mechanism of chain tooth type plough residue film reclaiming machine[J]. Journal of Agricultural Mechanization Research, 2019, 41(4): 107-111. (in Chinese with English abstract)
[19] 王旭峰,胡灿,鲁兵,等. 抛膜链齿输送式残膜回收机设计与试验[J]. 农业机械学报,2018,49(3):122-129.
Wang Xunfeng, Hu Can, Lu Bing, et al. Design and experiment of sprocket conveying residual film recycling machine of casting film[J]. Transactions of the Chinese Society For Agricultural Machinery, 2018, 49(3): 122-129. (in Chinese with English abstract)
[20] 杨丽,刘佳,张东兴. 棉花苗期地膜回收机设计与试验[J].农业机械学报,2010,41(增刊1):73-77.
Yang Li, Liu Jia, Zhang Dongxing. Design and experiment of plastic film collector for cotton fields during seedling period[J]. Transactions of the Chinese Society For Agricultural Machinery, 2010, 41(Supp.1): 73-77. (in Chinese with English abstract)
[21] 张学军. 残膜分离与输送装置的研究[D]. 长春:吉林大学,2007.
Zhang Xuejun. Study on Separation and Transport Device for Device for Remnant Plastic Film[D]. Changchun: Jilin University, 2007. (in Chinese with English abstract)
[22] 段文献,王吉奎,李阳,等. 夹指链式残膜回收装置的设计及试验[J]. 农业工程学报,2016,32(19):35-42.
Duan Wenxian, Wang Jikui, Li Yang, et al. Design and test of clamping finger-chain type device for recycling agricultural plastic film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 35-42. (in Chinese with English abstract)
[23] 谢建华,张凤贤,段威林. 圆盘碎土过程分析及试验[J].机械设计与制造,2018(7):218-221.
Xie Jianhua, Zhang Fengxian, Duan Weilin.Analysis and experiment of the disc crushing soil process[J].Machinery Design & Manufacture, 2018(7): 218-221. (in Chinese with English abstract)
[24] 刘英超,谢建华,侯书林,等. 一种直秆作物苗期残膜回收机构设计[J]. 农机化研究,2013,35(5):81-84,91.
Liu Yingchao, Xie Jianhua, Hou Shulin, et al. Plastic film recycling mechanism design of the straight rod crops in the seeding stage[J]. Journal of Agricultural Mechanization Research, 2013, 35(5): 81-84, 91. (in Chinese with English abstract)
[25] 杨松梅,颜利民,莫毅松,等. 随动式残膜捡拾装置设计与试验[J]. 农业机械学报,2018,49(12):109-115,164.
Yang Songmei, Yan Limin, Mo Yisong, et al. Design and experiment on collecting device for profile modeling residual plastic film collector[J]. Transactions of the Chinese Society For Agricultural Machinery, 2018, 49(12): 109-115,164. (in Chinese with English abstract)
[26] 杨业龙. 圆盘扎辊式残膜回收机碎土及捡拾机理研究[D].乌鲁木齐:新疆农业大学,2016.
Yang Yelong. Research on Breaking Soil and Collecting Mechanism of the Disc Roller Type Residual Film Recycling Machine[D]. Urumqi: Xinjiang Agricultural University, 2016. (in Chinese with English abstract)
[27] 张新超. 钉齿滚筒残膜回收机的设计与研究[D]. 石河子:石河子大学,2017.
Zhag Xinchao. The Design and Research of Spiked Tooth Plastic Film Residue Recovery[D]. Shihezi: Shihezi University, 2017. (in Chinese with English abstract)
[28] 谢建华,陈学庚,孙超伟. 杆齿式残膜回收机卸膜过程分析及高速摄像试验[J]. 农业工程学报,2017,33(10):17-24.
Xie Jianhua, Chen Xuegeng, Sun Chaowei. Unloading film process analysis and high-speed photography experiment of pole-tooth residual plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(10): 17-24. (in Chinese with English abstract)
[29] 王海新. 钉齿式残膜捡拾机的优化及试验研究[D]. 乌鲁木齐:新疆农业大学,2016.
Wang Haixin. Optimization and Experimental Study of Nail Tooth Plastic Film Residue Collector[D]. Urumqi: Xinjiang Agricultural University, 2016. (in Chinese with English abstract)
[30] 吕钊钦,张磊,张广玲,等. 链条导轨式地膜回收机的设计与试验[J]. 农业工程学报,2015,31(18):48-54.
Lü Zhaoqin, Zhang Lei, Zhang Guangling, et al. Design and test of chain guide rail-type plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 48-54. (in Chinese with English abstract)
[31] 刘旋峰,石鑫,郭兆峰,等. 滚筒式残膜回收机的性能试验研究[J]. 农业工程学报,2017,33(16):26-31.
Liu Xuanfeng, Shi Xin, Guo Zhaofeng, et al. Performance test on roller type residual film recycling machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 26-31. (in Chinese with English abstract)
[32] Witter S H. World-wide use of plastic in horticultural produc-tion[J]. Hort Technol, 1993, 3(1): 6-19.
[33] 严伟,胡志超,吴努,等. 铲筛式残膜回收机输膜机构参数优化与试验[J]. 农业工程学报,2017,33(1):17-24.
Yan Wei, Hu Zhichao, Wu Nu, et al. Parameter optimization and experiment of film transmission mechanism of spade screen recovery machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 17-24. (in Chinese with English abstract)
[34] 杨菊. 基于扩展有限元法和离散元法的土壤:耕具接触研究[D]. 昆明:昆明理工大学,2014.
Yang Ju. Analysis of Soil-Tool Interaction Using Extended Finite element Method and Discrete Element Method[D]. Kunming: Kunming University of Science and Technology. 2014. (in Chinese with English abstract)
[35] 明道绪. 高级生物统计[M]. 北京:中国农业出版社,2006.
[36] 孙岳,简建明,田玉泰,等. 残膜回收机旋转式起膜装置起膜机理分析与试验[J]. 农业机械学报,2018,49(增刊1):304-310.
Sun Yue, Jian Jianming, Tian Yutai, et al. Analysis and experiment of filming mechanism of rotary film-lifting device of residual film recycling machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(Supp.1): 304-310. (in Chinese with English abstract)
Design and parameter optimization of arc tooth and rolling bundle type plastic film residue collector
Xie Jianhua1, Zhang Fengxian1, Chen Xuegeng2※, Han Yingjie1, Tang Wei1
(1.,,830052,; 2.,,832000,)
The application of plastic film mulching technology has brought considerable economic benefits to China's agricultural production, but also caused a series of pollution problems. Due to the incomplete recovery and cumulative accumulation of plastic film residuals over years, the soil permeability to water and the soil structure are poor, seriously affecting the sustainable development of China’s agricultural economy. The main cause of such soil pollution is that the polyethylene film used in agricultural production in most areas of China is thin, the film covering time is long, and the recovery rate is low, and as such a large number of residual films remains in the soil tillage layer. Among them, the proportion of the buried edge film under the surface is 7% - 16%. The edge film is bound to the soil, which is easy to tear with the surface film when recycling, which leads to the difficulty of the recovery of the edge film. Researchers of agricultural machinery in China have developed a variety of plastic film residue collectors, including nail-tooth, telescopic rod-tooth, clip the hold type, spring-tooth and so on. However, there are many problems, such as complex structure, poor reliability and low recovery rate. At the same time, the research of the plastic film residue collector mainly focuses on the surface film pickup, while the research on the side film pickup and unloading is insufficient. Aiming at the problems of the existing plastic film residue collector, an arc tooth and rolling bundle type plastic film residue collector was designed in this study. According to the force of its work piece and the analysis of the motion track of the pickup mechanism, the key components such as the pickup shovel, the picking-up film mechanism and the unloading film mechanism were researched. In order to simulate the deformation and stress of nail teeth, plastic film and soil in the process of film-picking nail teeth fixing was used to guide the design of collector. Nonlinear finite element dynamics simulation analysis of film picking process of arc tooth and rolling bundle picking-up mechanism was done by use of ANSYS software. The simulation results showed that in the process of picking up plastic film, the end of nail teeth had the largest deformation. The maximum deformation of plastic film occurred at the contact position with the end of nail teeth. The deformation of soil disturbed by nail teeth was small. Using Box-Benhnken's central combination method, three-factor and three-level quadratic regression tests were carried out for the influence of the machine advancing velocity, the angle between the shovel wing and the shovel handle, and the depth of the nail teeth into the soil. Response surface regression model was established based on the carryover edge film rate, picking up film rate and unloading film rate, and the influence trend of each factor on the test index was analyzed. In order to improve the recovery rate of residual film residue, the influencing factors were optimized comprehensively. The experimental results showed that the significant factors affecting the rate of rimming film were as follows: the angle between the shovel wing and the shovel handle > the depth of the nail teeth into the soil > the machine advancing velocity. The significant factors affecting picking up film rate were as follows: the machine advancing velocity > the angle between the shovel wing and the shovel handle > the depth of the nail teeth into the soil. The significant factors affecting unloading film rate were as follows: the machine advancing velocity > the depth of the nail teeth into the soil > the angle between the shovel wing and the shovel handle. Finally, the optimum parameters were determined as follows: the machine advancing velocity was 4 km/h, the angle between the shovel wing and the shovel handle was 90°, and the depth of the nail teeth into the soil was 55 mm. Field experiments were conducted under these conditions and the following data were obtained, the carryover edge film rate was 93.5%, the picking up film rate was 87.4% and the unloading film rate was 87.1%, and the error between the experimental results and the optimized theoretical values was less than 4 percentage point. This research results provide theoretical basis and technical reference for structural design and working parameters selection of plastic film residue collector.
mechanization; design; optimization; picking up film mechanism; unloading film mechanism; simulation analysis; response surface experiments
2018-12-19
2019-05-15
国家自然科学基金资助项目(51665057);公益性行业(农业)科研专项(201503105);新疆自治区区域协同创新专项(2019E0202);中国农业大学-新疆农业大学联合基金项目(2017TC009)
谢建华,副教授,博士,主要从事农业机械装备设计与研究。Email:xjh199032@163.com
陈学庚,中国工程院院士,主要从事棉花生产机械化和残膜污染治理研究。Email:chenxg130@sina.com
10.11975/j.issn.1002-6819.2019.11.004
S223.5
A
1002-6819(2019)-11-0026-12
谢建华,张凤贤,陈学庚,韩英杰,唐 炜. 弧形齿滚扎式残膜回收机的设计及参数优化[J]. 农业工程学报,2019,35(11):26-37. doi:10.11975/j.issn.1002-6819.2019.11.004 http://www.tcsae.org
Xie Jianhua, Zhang Fengxian, Chen Xuegeng, Han Yingjie, Tang Wei. Design and parameter optimization of arc tooth and rolling bundle type plastic film residue collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(11): 26-37. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.11.004 http://www.tcsae.org
