康复步行训练机器人位置和速度跟踪误差同时约束的安全预测控制
2019-07-22孙平张帅
孙平 张帅

关键词:康复步行训练机器人;跟踪误差约束;安全预测控制;二次规划
DOI:10.15938/j.emc.2019.06.000
中图分类号文献标志码:A 文章编号:1007 -449X(2019)06 -0000 -00
Abstract:A rehabilitative training walker needs to track trajectory which is prescribed by doctors so that it can help rehabilitee train.The design scheme of a safe predictive controller is proposed while simultaneously considering the safety of the rehabilitees,extensive motion position and velocity tracking errors during training.The ultimate aim is to realize robots trajectory tracking and velocity tracking simultaneously for arbitrary initial position,and restrict tracing errors within prescribed range in order to increase the safety of the system.The predictive model with incremental control is established by discretizing kinetics model of the rehabilitative training walker.In predictive timedomain,the performance index of trajectory tracking errors is designed and the constraint conditions of tracking errors are structured.The predictive control of satisfying the constraint conditions of tracking errors is obtained by designing auxiliary motion trajectory and solving quadratic program with incremental control.The simulation and experiment results show the feasibility and superiority of the proposed control method with position and velocity tracking errors simultaneous constraints.
Keywords:rehabilitative training walker;tracking errors constraints;safe predictive control;quadratic program
0 引 言
隨着高龄人口增加和步行障碍患者增多,仅依靠理疗医生无法完成繁重的步行康复训练任务,因此康复步行训练机器人得到了极大发展[1-4]。步行训练机器人通常需要跟踪医生指定的运动轨迹,帮助患者康复训练,近年来,研究者们提出了多种跟踪控制方法,如解决重心偏移和负载变化的自适应控制[5];执行器故障时的冗余安全控制[6];提高轨迹跟踪精度的模糊滑模控制[7]等等。上述控制方法均以实现机器人轨迹跟踪或速度跟踪为目的,无法实现轨迹和速度同时跟踪,且没有考虑机器人的运动位置和速度约束。
与工业机器人不同,康复机器人与患者接触,运动位置和速度对保证康复者的安全具有重要意义。如果速度状态超过患者承受能力,将导致患者与机器人运动不协调而再次受伤;位置状态超出空间环境限制,机器人可能会碰撞周围人或物体。由此可见,不约束运动位置和速度对患者来讲是极其不安全的。事实上,由于机械系统的状态受到限制,会导致系统性能的下降[8-9]。如约束运动位置,难以实现速度跟踪;约束运动速度,不能保证实时跟踪运动位置。文献[10]利用饱和函数约束了康复机器人的运动速度,控制器通过增加补偿使机器人实现了轨迹跟踪,不仅控制器设计复杂,而且不能同时约束机器人的运动位置。文献[11]通过直接构造康复机器人系统的渐近稳定约束条件,限制了机器人的运动速度,但无法进一步实现运动位置约束。文献[12-13]通过建立有界Lyapunov函数(Barrier Lyapunov Function)限制了系统的状态,然而,结构复杂的控制器仅能处理单一状态变量约束。
另外,康复机器人帮助患者训练时,可以从任意初始位置开始运动,初始条件将直接影响康复机器人对医生指定训练轨迹的跟踪精度。文献[14-15]分别研究了提高暂态跟踪性能和零跟踪误差的控制方法;文献[16]采用凸优化方法研究了误差受限跟踪控制问题。然而,上述方法均假设初始跟踪误差满足约束范围,无法解决初始误差超过约束范围的状态受限问题。
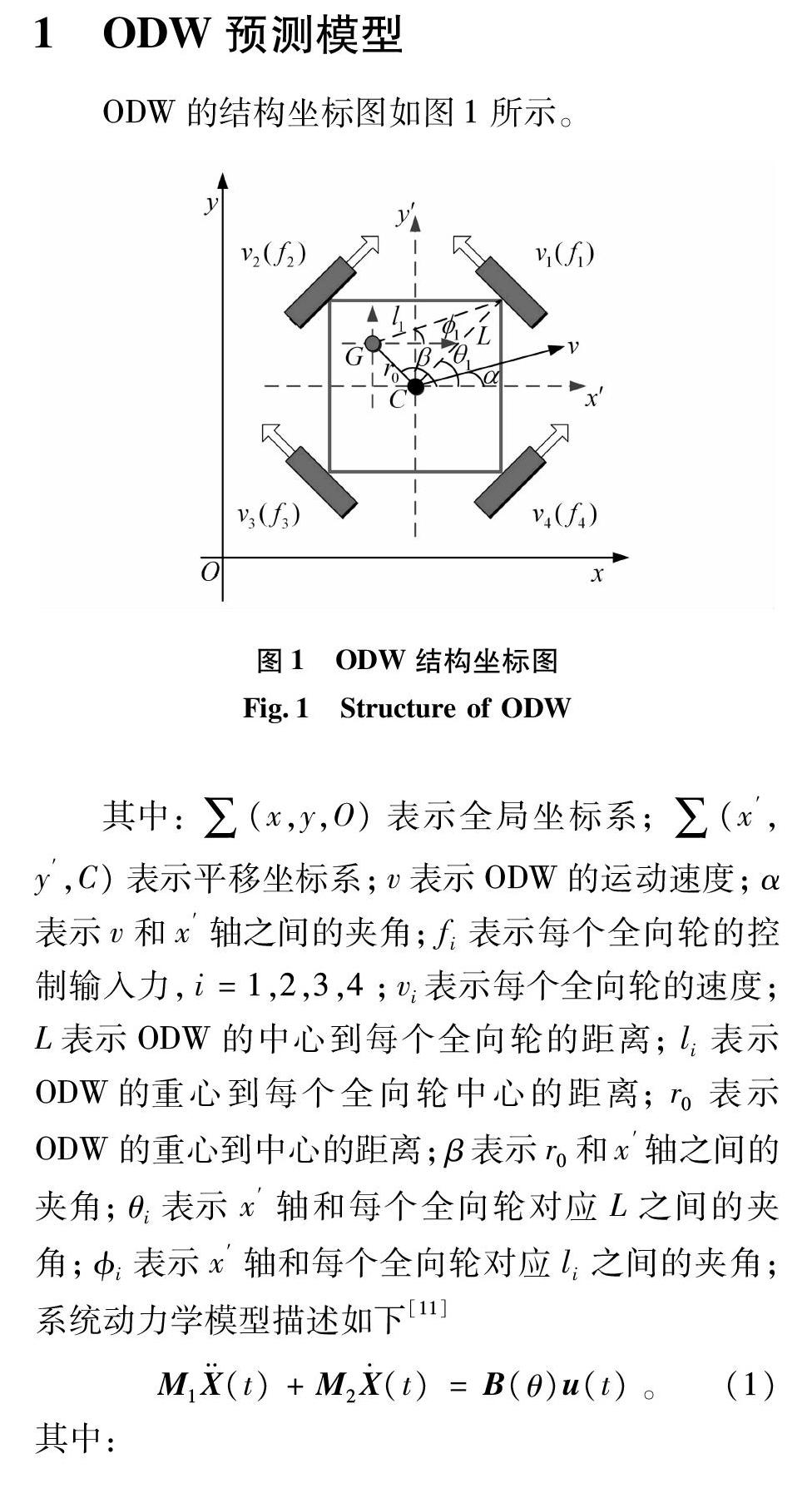
近年来,模型预测控制在处理系统约束问题中得到了广泛应用[17-18],由于同时约束康复机器人系统的运动位置和速度,需要建立6个约束条件,如何求解满足这些约束条件的预测控制器,具有一定难度。鉴于此,本文针对一种全方向康复步行训练机器人(omnidirectional rehabilitative training walker,ODW)[19]提出了安全预测控制方法,确保ODW从任意位置出发,都能同时约束其运动位置和速度跟踪误差,完成的主要工作有:
1)将ODW动力学模型进行离散化,建立了具有控制增量形式的预测模型。
2)设计了轨迹跟踪误差性能优化指标,建立了跟踪误差约束条件,并把满足约束条件的性能优化问题,转化为求解控制增量的二次规划问题。
3)给出了辅助运动轨迹的构造方案,保证ODW从任意位置出发,都能获得安全预测控制。
4)通过仿真和实验研究,验证了本文提出安全预测控制方法同时约束位置和速度跟踪误差的有效性和优越性。
5 结 论
研究了全方向康复步行训练机器人运动位置和速度跟踪误差同时受限的跟踪控制问题。提出了安全预测控制方法,并给出了辅助运动轨迹构造方案,使ODW从任意位置出发都能同时实现运动轨迹和运动速度跟踪,且将跟踪误差约束在指定范围,保证了ODW系统运动状态的安全性。建立了ODW预测模型及性能优化函数,通过求解控制增量形式的二次规划问题,获得了时域内满足误差约束条件的预测控制。仿真和实验结果表明了文中提出控制方法的有效性,能保证ODW在安全运动状态下帮助康复者步行训练。文中提出的安全预测控制方法,除了应用于ODW外,对从任意位置出发需要限制运动状态的轮式移动机器人均具有适用性。
参 考 文 献:
[1] GUO Shuai,JI Jiancheng,MA Guangwei,et al.Lower limb rehabilitation robot for gait training[J].Journal of Mechanics in Medicine and Biology,2014,14(6): 1440004-1.
[2] SAN M D,CESTARI M,AREVALO J C,et al.Generation and control of adaptive gaits in lower limb exoskeletons for motion assistance[J].Advanced Robotics,2014,28(5): 329.
[3] GUO Zhao,YU Haoyong,YUE H Y.Developing a mobile lower limb robotic exoskeletons for gait rehabilitation[J].Journal of Medical Devices,2014,8(12): 044503-1.
[4] JIANG Yinlai,WANG Shuoyu,ISHIDA K,et al.Directional control of an omnidirectional walking support walker: adaptation to individual differences with fuzzy learning[J].Advanced Robotics,2014,28(7): 479.
[5] SUN Ping,WANG Shuoyu.Redundant input safety tracking control for omnidirectional rehabilitative training walker with control constraints[J].Asian Journal of Control,2017,19(1): 116.
[6] TAN Renpeng,WANG Shuoyu,JIANG Yinlai.Adaptive control method for pathtracking control of an omnidirectional walker compensating for centerofgravity shifts and load changes[J].International Journal of Innovative Computing,Information and Control,2011,7(7): 4423.
[7] LIU Quan,LIU Dong,MENG Wei,et al.Fuzzy sliding mode control of a multiDOF robot in rehabilitation environment[J].International Journal of Humanoid Robotics,2014,11(1): 1.
[8] LI Yongming,TONG Shaocheng,LI Tieshan.Adaptive fuzzy outputfeedback control for output constrained nonlinear systems in the presence of input saturation[J].Fuzzy Sets and Systems,2014(248): 138.
[9] HAN S I,LEE J M.Output tracking error constrained robust positioning control for a nonsmooth nonlinear dynamic system[J].IEEE Transactions on Industrial Electronics,2014,61(12):6882.
[10] 孫平.速度受限的全方向康复步行训练机器人Backstepping补偿跟踪控制[J].信息与控制,2015,44(3): 309.
SUN Ping.Backstepping compensation tracking control for omnidirectional rehabilitative training walker with velocity constraints[J].Information and Control,2015,44(3): 309.
[11] SUN Ping,WANG Shuoyu.Guaranteed cost nonfragile tracking control for omnidirectional rehabilitative training walker with velocity constraints[J].International Journal of Control,Automation and Systems,2016,4(5):1340.
[12] NIU Ben,ZHAO Jun.Output tracking control for a class of switched nonlinear systems with partial state constraints[J].IET Control Theory and Applications,2013,7(4): 623.
[13] NIU Ben,ZHAO Jun.Tracking control for outputconstrained nonlinear switched systems with a barrier Lyapunov function[J].International Journal of System Science,2013,44(5): 978.
[14] YUCELEN T,TORRE G D,JOHNSON E N.Improving transient performance of adaptive control architectures usingfrequencylimited system error dynamics[J].International Journal of Control,2014,87(11): 2383.
[15] ZHANG Zhengqiang,SHEN Hao,LI Ze,et al.Zeroerror tracking control of uncertain nonlinear system in the presence of actuator hysteresis[J].International Journal of System Science,2015,46(15): 2853.
[16] WEI Guoliang,WANG Zidong,SHEN Bo.Errorconstrained finitehorizon tracking control with incomplete measurements and bounded noises[J].International Journal of Robust and Nonlinear Control,2012(22):223.
[17] KARL W,MOHANED W,MEHRE Z,ea al.Model predictive control of nonholonomic mobile robots without stabilizing constraints and costs[J].IEEE Transactions on Control Systems Technology,2016,24(4): 1394.
[18] 王永賓,林辉,计宏.多约束永磁同步电机稳定模型预测控制策略[J].电机与控制学报,2011,15(12): 7.
WANG Yongbin,LIN Hui,JI Hong.Stabilizing model predictive control strategy for permanent magnet synchronous motor with multivariable constraints[J].Electric Machines and Control,2011,15(12): 7.
[19] CHANG Hongbin,SUN Ping,WANG Shuoyu.A robust adaptive tracking control method for a rehabilitative walker using random parameters[J].International Journal of Control,2017,90(7): 1446.
[20] 曾志文,卢惠民,张辉,等.基于模型预测控制的移动机器人轨迹跟踪[J].控制工程,2011(18):80.
ZENG Zhiwen,LU Huimin,ZHANG Hui,et al.Trajectory tracking based on model predictive control for omnidirectional mobile robot[J].Control Engineering of China,2011(18): 80.
(编辑:刘琳琳)
