基于自适应的变形式陆空机器人转域过程飞行控制
2019-07-18冯宜明王建中施家栋
冯宜明,王建中,施家栋
北京理工大学 爆炸科学与技术国家重点实验室,北京 100081
在建筑物密集的城区,兼顾越障能力和续航时间的陆空机器人具有许多独特的优越性。近年来,在四旋翼和共轴双旋翼无人机的基础上,有研究人员研发了许多具备上述功能的陆空两栖机器人[1-4],其主要分为两种:一种是将轮式和飞行两种不同移动方式进行简单叠加的陆空机器人,没有将不同的移动方式真正的融合为一体,另外没有考虑到机器人的防护问题,导致机器人在不同运动方式之间切换时容易损坏,如南安普顿大学设计的“B”机器人[3]等;另一种是可变形陆空机器人,机器人在地面及飞行状态下拥有不同形态,通过变形完成两种状态的切换,将不同的移动方式融为一体,但却存在着从地面到飞行或从飞行到地面状态机动性不连续的问题,在陆空变形过程中可能错过侦查时机,并且长时间的原地变形也会增加被反侦察的风险,如明尼苏达大学研制的一款微小型陆空机器人[4]等。
本文针对一种变形式四旋翼陆空两栖机器人,研究空地转域飞行控制方法,在陆空机器人降落过程中完成或部分完成陆空状态变形,为实现从空中到地面的连续机动奠定了基础。针对对称机体或确定模型的四旋翼飞行控制国内外业已取得较多研究成果[5-10],文献[5]中采用传统比例-积分-微分(PID)控制器在忽略空气阻力等外部因素影响下可以实现四旋翼的稳定飞行;文献[6]中设计了一种可选择的PI/PID算法,降低了稳态误差;文献[7]中利用设计的模糊PID控制器减小了外部扰动对整个飞行控制系统的影响;文献[8]中设计了一种连续时变的自适应跟踪控制器,实验验证表明控制效果较好;文献[9]和文献[10]则分别采用反馈线性化方法和反步法对四旋翼进行飞行控制。而对于可变模型的四旋翼飞行控制研究较少,如文献[11]针对飞行器因意外碰撞或地面指令抛掉负载引起的系统参数改变而设计的基于单一PID控制器的模型参考自适应补偿器,理论较为简单,且控制效果不明显,实际工程应用有限。本文考虑转域变形过程导致的转动惯量改变和复杂飞行环境中可能出现的负载变化和机体质量受损问题,利用雅克比矩阵对系统模型线性化后,在设计基于线型性二次型调节器(LQR)算法的姿态控制器和基于PID算法的高度控制器的基础上,加入模型参考自适应控制对系统模型不确定性问题进行补偿,保证了闭环控制系统的全局渐进稳定。利用Adams和MATLAB联合仿真,在保证机器人转域变形过程中姿态及高度控制有效性和可靠性的同时使其具有可视性。通过搭建的陆空机器人飞行及转域样机对机器人的转域飞行控制进行了试验验证。
1 动力学模型
变形式陆空两栖机器人以陆地行进模式为主,当遇到障碍无法行进时切换为飞行模式,因此机器人有飞行、转域变形和陆地行进3种状态,如图1所示。4个旋翼电机固连于4个轮盘中心,旋翼由旋翼护圈轮保护,通过舵机驱动变形机构完成转域变形,旋翼护圈轮将作为陆地行进车轮。本文仅研究陆空机器人降落前后变形与飞行交合的问题,为方便研究,忽略地面行进结构,仅考虑其质量影响,构建简化的飞行及转域系统结构模型,如图2所示。该模型与陆空机器人的转域飞行过程中不同变形角度状态下的特性基本等效。


图1 变形式陆空两栖机器人结构Fig.1 Structures of metamorphic air-land amphibious vehicles

图2 飞行及转域系统结构模型Fig.2 Structural model for flight and area transfer system
图3 所示为转域变形α角度(与水平面夹角)的系统状态简化模型,取地面坐标系为Oxiyizi;机体坐标系为Oxbybzb,坐标原点与质心重合。
飞行状态时采用X型四旋翼模式,坐标轴xb、yb与飞行状态下对角旋翼电机连线的分角线重合,xb为前进方向;转域模型整体视为刚体;转域变形过程4个舵机转速相同,即保证任意时刻4个旋翼变形倾角α相同;不考虑地球自转及公转影响,不考虑螺旋桨挥舞特性[12];旋翼在旋转时是一个均匀作用于空气的无限薄的圆盘[2]。

图3 转域变形状态Fig.3 Area transfer status
在忽略螺旋桨的阻力和侧向力矩情况下,单个电机产生的主要有拉力Ti和阻力矩Ωi(i=1,2,3,4)。转域变形α角度后,螺旋桨平面随之倾斜,拉力和阻力矩将产生沿机体坐标系3个轴的分力,因转域变形过程中时刻保持4个旋翼臂变形角度一致,4个旋翼产生的沿xb、yb轴上的分力和近似为零,仅保留沿zb轴方向的升力Tzi和阻力矩Ωzi。拉力及阻力矩与电机转速ωi(i=1,2,3,4)之间满足[13]:

式中:CT、CΩ分别为旋翼的拉力系数和扭矩系数;ρ为空气密度;A=πR2为螺旋桨的面积;CT、CΩ、ρ、A、R均为定值;k为升力系数;d 为阻力矩系数[13]。
在惯性坐标系中:

式中:T为旋翼总升力;m为系统质量;g为重力加速度;Cib为机体坐标系到惯性坐标系的转换矩阵[14]。即

式中:φ、θ、ψ分别为横滚角、俯仰角和偏航角。

式中:p、q、r为机体坐标系下机体沿3个轴的角速度。

式中:Jx、Jy、Jz为系统关于机体坐标系xb、yb、zb轴的转动惯量;τφ、τθ、τψ为滚转、俯仰和偏航3个角运动方向上的控制力矩,满足:
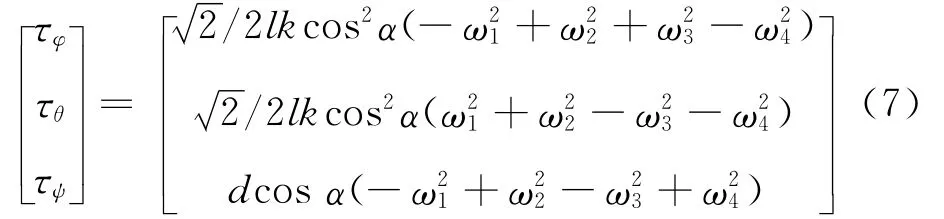
式中:l为旋翼质心到系统质心的距离。
2 系统控制模型
模型参考自适应控制系统(MRACS)设计前需先对基础控制器进行设计,利用基础控制器和系统模型得到参考模型,从而得到模型参考自适应控制律[15-16]。变形式陆空两栖机器人飞行及转域系统基础控制器方案分为内环和外环控制两部分,控制内环是在已建立的系统动力学模型基础上,利用雅克比矩阵对该模型在平衡点进行线性化,然后利用线性模型设计基于LQR的姿态控制器和基于PID算法的高度控制器;控制外环是利用PID算法建立x、y方向与姿态角φ、θ之间的关系[17-19]从而解决系统的欠驱动问题,此控制器较为简单,本文不再赘述,仅对姿态和高度控制器进行设计。
2.1 LQR姿态控制器设计
选取u= [τφτθτψ]T= [u2u3u4]T为姿态控制输入向量,x= [φ p θ q ψr ]T为状态向量,可将系统非线性动力学模型写为x=f(x,u)的状态空间形式。
此非线性状态方程利用雅克比矩阵[20]线性化后写为

考虑到系统多是在悬停和低速的平衡点附近运动,因此可将其在平衡点附近进行线性化处理,取此时系统状态x=[0 00000]T代入系数雅克比矩阵中可得

至此,系统的线性时不变状态空间模型得以建立。构建基于LQR的姿态控制框图如图4所示。

图4 LQR姿态控制框图Fig.4 Diagram of LQR attitade control
引入误差向量:

状态空间模型扩展为

根据LQR控制理论,设计最优控制律为

式中:K1为反馈增益矩阵;K2前馈增益矩阵,使得二次型目标函数J取值最小。

式中:x= [x xI]T;Q、R分别为x、u的正定加权矩阵,其中元素比例关系的选取将影响系统的控制效果。当J取值最小时

式中:K= [K1K2]T;P为Riccati方程的解。
据以上分析,可得基于LQR的姿态控制器的状态空间方程为

2.2 PID高度控制器设计
变形式陆空机器人实际控制系统是由控制器产生电机的调速控制信号,经由电调节电机转速带动旋翼旋转产生升力,4个电机升力合成后形成控制输入u再作用于实际系统。因此实际控制系统传递函数图如图5所示。
框图中,G1(s)表示由电机模型决定的电机调速控制信号到拉力间的传递函数,G2(s)表示输入到状态间的传递函数。

图5 实际系统传递函数框图Fig.4 Diagram of real system transfer function
式中:实际系统选用响应时间为0.1s的电机,kr为电机调速控制信号与拉力之间的比例系数,可由电机拉力测试实验得到。
由系统模型可知,当系统处于高度控制过程中,系统姿态角变化较小,取cosφcosθ≈1,高度动力学方程简化为

则传递函数G2(s)为

设计系统高度控制的PID控制律为

其对应传递函数为

则系统的高度控制的闭环传递函数为:

选取xz= [z z·]T为状态向量。将高度控制传递函数转化为与之相对应的状态空间方程形式从而得到状态方程系数Ah、Bh、Ch,方程为

2.3 MRACS设计
上述姿态及高度控制器在模型参数不改变的情况下,状态方程中各参数变化微小,可以使系统具有较好的控制性能指标。然而当系统进行转域变形时,系统转动惯量会发生改变,对于姿态控制器而言,状态方程参数Ba将出现偏差,LQR控制参数K也将改变,此时基于LQR控制器的姿态闭环控制系统性能将会将降低;当系统飞行及转域过程中出现负载变化或机体质量受损时,系统高度控制器的状态方程参数也将出现变化,从而影响基于PID控制器的高度控制系统性能。因此,为了保证系统在转域、负载变化或机体受损情况下的姿态及高度控制性能,考虑加入模型参考自适应控制对系统模型不确定性进行补偿。
以姿态控制为例,高度控制类似。加入模型参考自适应控制后的系统控制框图如图6所示(其中实际模型中包含基础控制器):
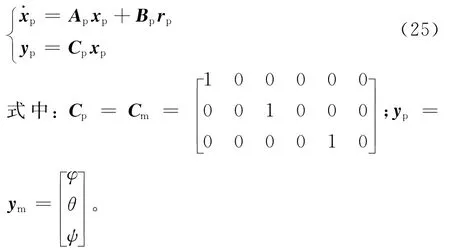
选取参考模型为

式中:Am、Bm、Cm为上述基础控制器状态空间方程参数值。
系统实际模型为
设计自适应控制律为

式中:r为系统期望输入;Kt、Ft分别为自适应控制前馈增益矩阵和反馈增益矩阵。
将式(26)代入式(25)可得实际系统为
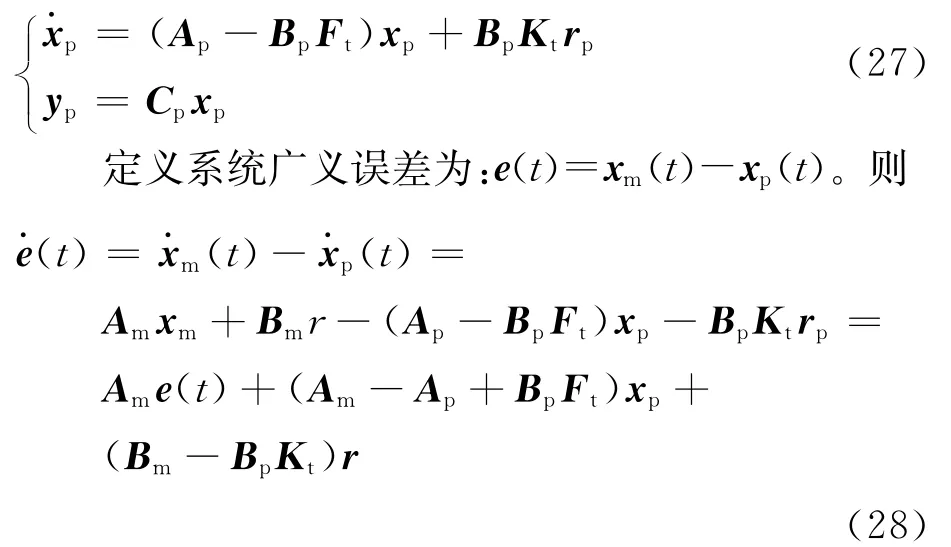

图6 模型参考自适应控制系统框图Fig.6 Diagram of MRACS


为保证系统稳定性,选取Lyapunov函数:

式中:Γ1、Γ2为三维正定对称矩阵;Pm满足PmAm=-Qm,其中Qm为六维正定矩阵。
对式(31)两边求导可得

易知,式(32)第一项是负定的,为使V·<0,令后两项为零即可,解之可得


由V>0,V·<0及Lyapunov稳定性理论可0,考虑系统多是在悬停和低速的平衡点附近运动即在小扰动下系统全局渐近稳定。高度模型参考自适应控制器设计与姿态类似。故此得实际姿态及高度控制系统性能趋近于参考模型系统性能,从而实现了对参考模型的跟踪。
3 仿真分析
3.1 MATLAB/Adams联合仿真模型
建立图7所示转域飞行系统的Adams模型,其输入量为4个旋翼电机的转速以及4个变形舵机的转动角度(同步变形所以实为一个量),输出量为模型当前的3个姿态角和质心空间坐标。利用Adams/control模块生成Simulink可读取的.slx格式文件[21],并在 MATLAB中调用adams_sys命令即可打开图8所示的转域飞行系统的动力学模块[21-22]。

图7 转域飞行系统Adams动力学模型Fig.7 Adams dynamic model for flight andarea transfer system

图8 转域飞行系统动力学模块[21-22]Fig.8 Dynamic module for flight and area transfer system[21-22]
在Simulink中将动力学模块的输入和输出量与控制系统模块建立关系,即在Simulink中建立各个控制环节的控制模块,并添加适当的自定义函数,搭建如图9所示可方便辨识的封装后的联合仿真模型(其中ez和ep分别为高度和姿态误差)。
3.2 仿真结果分析
仿真开始前需要对转域飞行系统参数进行初始化设置,根据试验样机得到如表1所示参数。
通过MATLAB中PID工具箱经过不断循环测试得到对高度控制效果较好的Kp、Ki、Kd以及利用仿真结果试凑确定Q、R、Γ1、Γ2、Qm,如表2 所示。

图9 联合仿真模型Fig.9 Co-simulation model
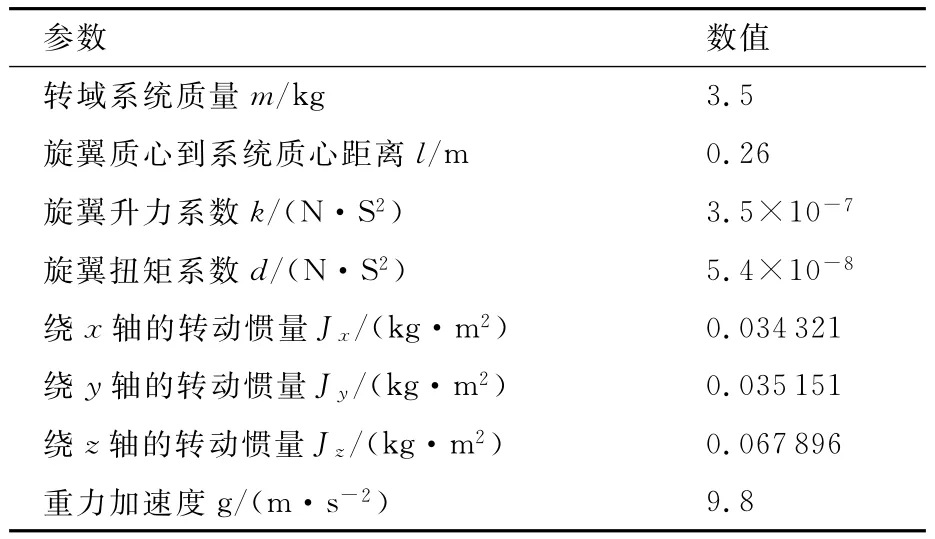
表1 转域飞行系统参数Table 1 Structural parameters of flight and area transfer system
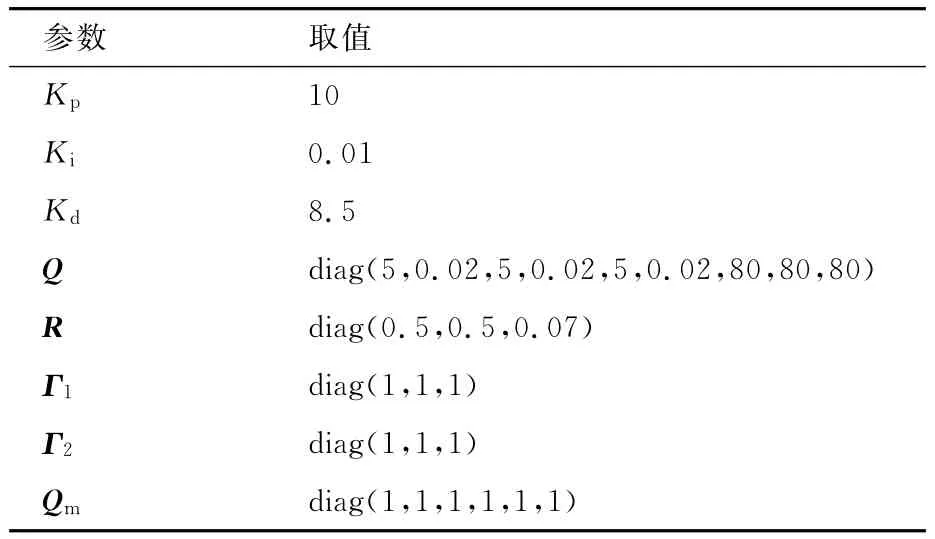
表2 控制器参数Table 2 Control parameters
为保证陆空机器人的连续机动性,考虑在达到变形角度极限位置时,将陆空机器人降落至很低的高度位置,然后通过加快舵机转速完成剩余部分的变形使得机器人在降落的同时完成彻底的变形。因此首先利用联合仿真模型对转域过程高度的控制进行仿真,以找到转域变形角度的极限值。
设置期望高度为10m,起飞达到期望高度稳定后,开始降落并设置降落的期望高度为0m,整个过程模拟起飞和变形前的降落。开始降落后,设置转域变形,即设置变形舵机以0.5rad/s转速变形到指定角度α(15°、30°、45°和50°),仿真结果如图10~图12所示。
仿真结果表明,当变形角度α不大于45°时,系统高度均在可控范围内,且控制较为精确稳定;当变形角度α=50°时,出现不可控的下降现象,即此变形角度下无法对高度进行稳定控制。考虑实际系统中对舵机的控制可能存在一定的误差,因此将变形角度α=45°作为转域变形角度的极限值(图11仿真由变形舵机控制下的转域变形角度变化曲线,每次变形α均从0°开始连续变形到指定角度,图中4条曲线在达到稳定值前重合表示每次设置变形舵机变形开始于6s,并且具有相同的变形转速)。
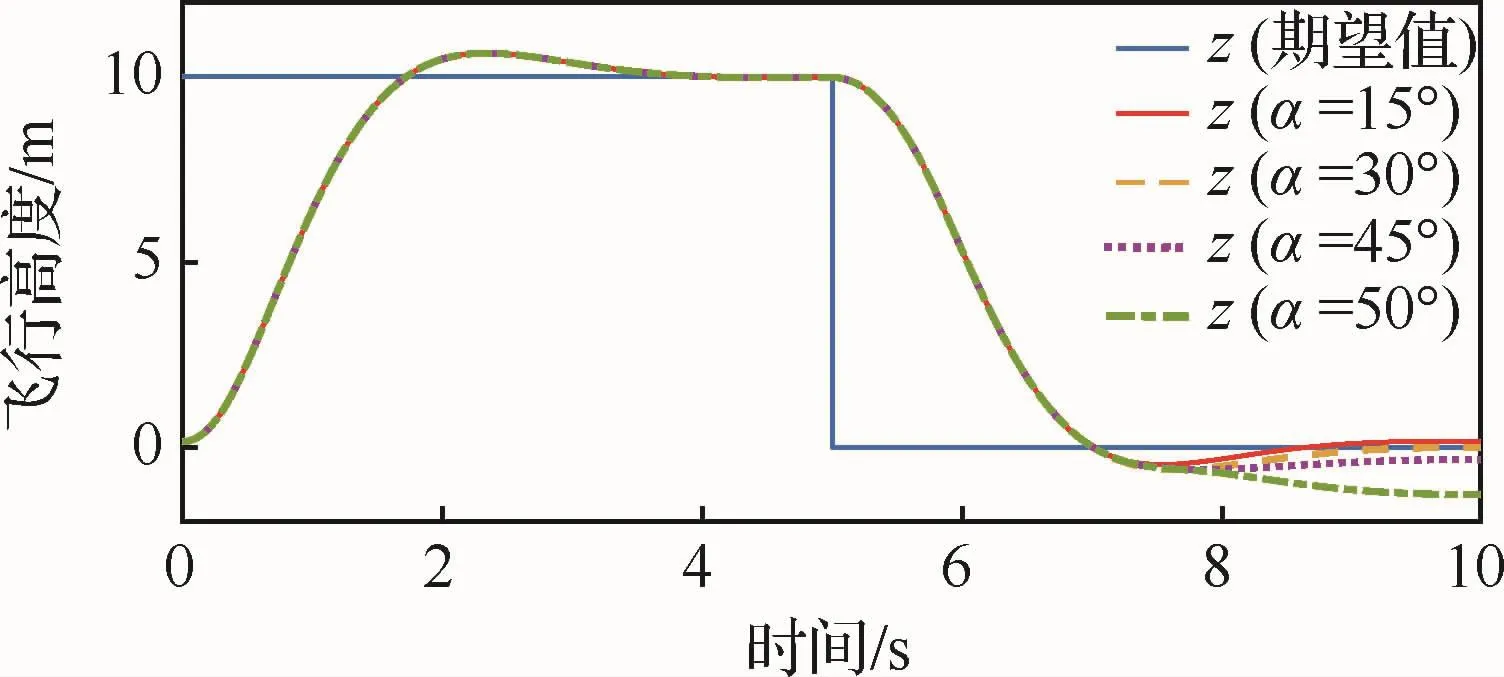
图10 转域飞行高度响应曲线Fig.10 Flight height response curves of area transfer

图11 转域变形角度α变化曲线Fig.11 Variation of area transfer deformable angleα
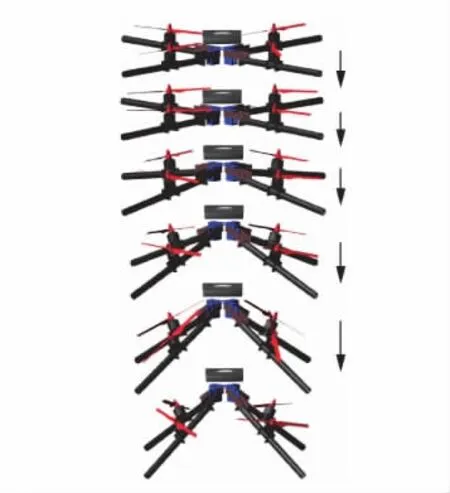
图12 转域变形至45°时Adams仿真动画截图Fig.12 Adams animation screenshot of area transfer deformable angle is 45°
考虑转域过程系统模型参数改变可能导致的姿态控制性能下降的问题,对转域变形角度小于极限值时系统姿态控制进行仿真。设置在1s时系统开始转域变形至15°,对比仿真基于LQR控制和基于模型参考自适应控制下的滚转角输出响应如图13所示。
设置1s时系统开始转域变形至30°,对比仿真基于LQR控制和基于模型参考自适应控制下的俯仰角输出响应如图14所示。
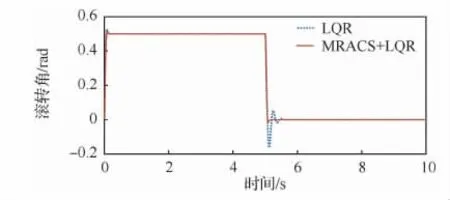
图13 转域变形至15°时滚转角响应曲线Fig.13 Response curves of roll angle when area transfer deformable angle is 15°
设置1s时系统开始转域变形至40°,对比仿真基于LQR控制和基于模型参考自适应控制下的偏航角输出响应如图15所示。
考虑当系统飞行及转域过程中出现负载变化或机体质量受损时可能导致的高度控制性能下降,设置在2s时系统质量改变为原来的70%对比仿真基于PID和基于模型参考自适应控制下的飞行高度输出响应如图16所示。
图14 转域变形至30°时俯仰角响应曲线Fig.14 Response curves of pitch angle when area transfer deformable angle is 30°

图15 转域变形至40°时偏航角响应曲线Fig.15 Response curves of yaw angle when area transfer deformable angle is 40°

图16 质量变为70%时飞行高度响应曲线Fig.16 Response curves of height when mass changes to 70%
图13 ~图15仿真结果表明,转域变形后,导致系统模型参数改变,在不加入模型参考自适应补偿器的情况下,仅依靠LQR基础控制器对系统姿态进行调整时,姿态控制性能会大幅度衰减,超调量及响应时间明显增加,且对比可知,该增加量随转域变形角度增大而增大;加入模型参考自适应补偿器后,姿态控制性能得到很大的改善,系统参数改变前后控制效果都十分理想。图16表明,系统出现负载变化或质量受损时,仅依靠PID基础控制器对系统高度控制时,超调量和相应时间明显变长,控制系统性能衰减;加入模型参考自适应补偿器后,系统质量改变前后控制效果都较为理想。因此,模型参考自适应补偿器的加入可以使得系统在转域飞行过程的姿态调整以及质量变化时的高度调整仍具有理想的控制效果,对系统模型不确定性问题进行了很好的弥补。
4 试 验
研制转域飞行样机,对转域过程中不同变形角度状态进行飞行试验。试验结果表明当变形角度α为15°及30°时,可完成飞行姿态及位置的调整。当变形角度为45°时,仍可操控样机的起飞降落,但针对其姿态角的控制响应时间变长,且较难操控。当变形角度为50°时,在将油门推至满油状态下样机仍难以起飞。变形角度为45°时转域飞行试验场景截图如图17所示。
读取飞行日志中变形角度为45°时的姿态输出数据,将其导入MATLAB中并绘制出姿态角响应曲线图,如图18~图20所示。

图17 45°变形下转域飞行试验Fig.17 Experiment of area transfer flying under 45°deformation
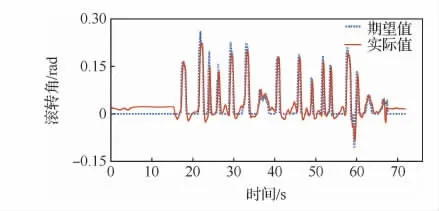
图18 变形角度为45°时滚转角数据曲线Fig.18 Data curves of roll angle when deformable angle is 45°

图19 变形角度为45°时俯仰角数据曲线Fig.19 Data curves of pitch angle when deformable angle is 45°

图20 变形角度为45°时偏航角数据曲线Fig.20 Data curves of yaw angle when deformable angle is 45°
试验姿态角数据表明,在考虑到实际样机的工程误差问题及其他干扰问题,试验样机对期望姿态具有良好的跟踪效果,验证了本文控制策略的有效性。
5 结 论
通过对变形式四旋翼陆空两栖机器人转域飞行控制技术的研究,可得出结论如下:
1)为此类具有不确定性模型或可变模型的飞行器控制问题提供了一种参考解决方案。
2)联合仿真找到了空陆转域飞行变形角度的极限值。
3)验证了系统加入模型参考自适应控制后的姿态及高度控制器效果优势明显。
4)为实现陆空机器人从空中到地面的连续机动以及未来具有更高灵活性的陆空机器人发展奠定了基础。
5)联合仿真和试验结果表明在变形角度α不大于45°时可对空陆转域飞行的姿态及高度进行稳定控制。
