模糊预测控制在地铁舒适度方面的研究与仿真
2019-07-13王金刚
王金刚
(通号城市轨道交通技术有限公司,北京 100070)
1 概述
地铁作为大城市重要交通工具,乘客对其舒适度的要求也越来越高,列车纵向冲击率(列车运行方向加速度的变化率)作为判断舒适度的重要标准,各地招标文件对舒适度也提出明确要求,在保证停车精度指标满足的情况下,要求列车纵向冲击率小于等于0.75 m/s3。本文就模糊预测控制算法在地铁舒适度方面进行研究和仿真,并提出模糊预测控制方案设计,通过在M A T L A B平台上对模糊预测控制器进行仿真,说明模糊预测控制算法相比PID 控制可以提高地铁舒适度。
2 ATO系统速度调整控制原理和舒适度因素分析
2.1 ATO系统速度控制原理
ATO 利用车-地通信设备双向通信传输,实现对列车牵引和制动进行控制,能够替代司机智能化地驾驶列车,使列车运行经常处于最佳状态,提高乘客的舒适度和列车准点率,节约能源。A T O 采用高可靠性的闭环控制系统,能够周期性地从列车自动防护系统(Automatic Tr ain Protection,ATP)获取前方最新的目标距离和目标速度,结合自身定位信息、速度传感器获得的列车即时速度信息以及列车自动监控(Automatic Tr ain Sup er v ision,A TS) 下发的调整命令,计算命令速度曲线,并将命令速度和实际速度的差值作为控制模型的输入,控制模型再结合线路数据中弯道和坡度等信息自动计算控制策略,输出控制级位下达至列车。若能够在A T O 闭环控制系统中采用有效控制策略,使得A T O 可以在一定范围内对列车牵引和制动性能的改变做到自适应,可以有效地兼顾乘客舒适度和列车运行效率。ATO 系统速度控制原理示意如图1 所示。
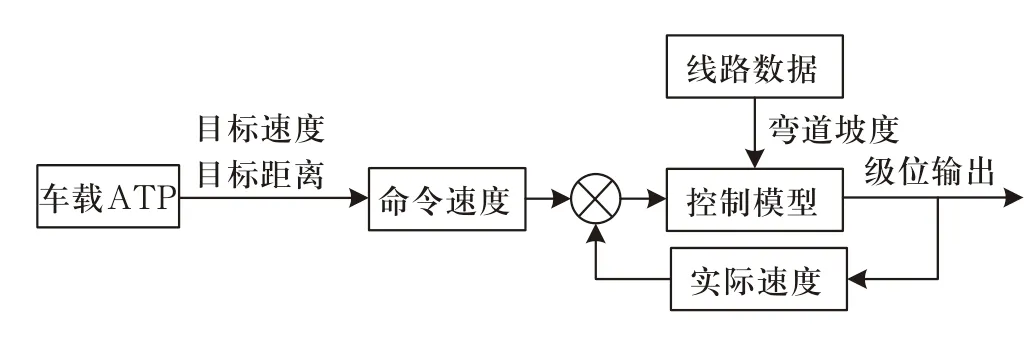
图1 ATO系统速度控制原理示意图Fig.1 ATO system speed control principle diagram
2.2 舒适度因素分析
影响地铁舒适度的因素是多方面的,主要是列车在启动和制动过程中,或者遇到弯道或者上下坡等干扰过程中,列车控制级位频繁切换、加速度和加速度的变化率过高都会引起乘客舒适度降低。因此,列车运行中尽量降低牵引和制动的切换频率,加速度的变化率保持在一定合理范围内。
参照相关文献资料,通过测试加速度和舒适度的关系,以20% 的测试人员不能容忍的加速度值作为最大极限值,加速度的最大值为1.8 m/s2,实际值范围1.2 ~1.4 m/s2;加速度变化率的最大值2 m/s3,实际值范围0.7 ~0.8 m/s3。
3 模糊预测控制原理和方案设计
3.1 模糊控制原理
模糊控制器是模糊控制系统核心模块。模糊控制器的结构主要包括模糊化接口、推理机、知识库、解模糊化接口4 个模块组成,如图2 所示。
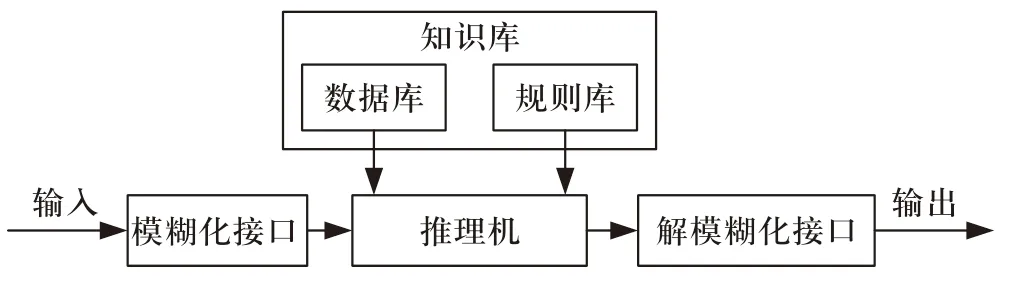
图2 模糊控制器的结构图Fig.2 Fuzzy controller structure diagram
3.2 预测控制原理
预测控制具有预测模型、滚动优化和反馈校正等特点,其原理如图3 所示。
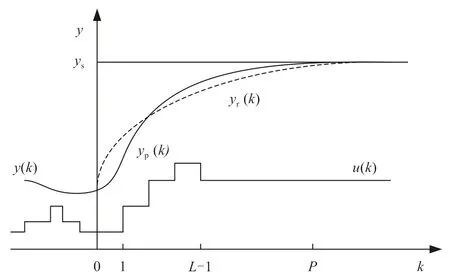
图3 预测控制原理图Fig.3 Predictive control principle diagram
其中,k <0 表示过去的采样时刻,k=0 表示当前的采样时刻,k >0 表示未来的采样时刻。ys表示参考轨迹的设定值,yp(k)代表k 时刻的预测输出值,yr(k)表示k 时刻期望输出值。预测控制算法就是通过比较yp(k)与yr(k)之间的误差e(k)作为控制模型的输入,计算下一时刻的控制量u(k)(k=1,2,…,L-1),使误差e(k)逐渐达到最小值。P 称为预测步数,L 称为控制步数。
3.3 模糊预测控制方案设计
A T O 算法关键要解决的问题有两点:一是如何使操纵策略和驾驶行为等智能应用在算法中得到体现,二是如何处理变化的因素。模糊控制作用在列车上输出级位等级命令,整个过程为模糊控制;预测控制是模糊控制的补充,是针对模糊控制对延时大的系统列车模型时变、控制精度不高等特点而设置的,能够预测下一时刻的控制量,通过比较预测输出和实际输出的偏差反馈到模糊控制器的输入端,对预测模型起到在线校正的功能,整个过程为预测控制。
通过上述描述,设计模糊预测控制器。核心思想就是通过预测模型得到预测输出值yp和目标速度设定值yr进行比较,两者之间的误差e 和误差变化率ec作为模糊控制器的输入,通过模糊控制器得到控制量u 作用于列车控制系统中,有效满足列车速度的控制,提高达乘客的舒适度,如图4 所示。

图4 模糊预测控制器Fig.4 Fuzzy predictive controller
4 仿真结果
目前绝大多数列车运行控制系统还是基于传统的PID 控制,通过MATLAB 软件中的Simulink仿真环境分别采用PID 和模糊预测控制控制对列车的速度进行仿真。
列车模型:设计列车模型如公式(1)所示:

线路设计:设计列车从启动、匀速、制动整个过程的运行时间为200 s,其中启动时间为20 s,匀速时间为175 s,制动时间为25 s。
列车信息:设计列车目标速度v 为80 k m/h,加 速 度a 范 围1.2 ~1.4 m/s2, 取 加 速 度a=1.2 m/s2,因此启动过程中系统的调节时间为ts=22.2/1.2=18.5 s,取调节时间ts=20 s。取列车常用制动距离为270 m,常用制动减速度为1.0 m/s2,常用制动时间约为25 s。
在列车启动和制动过程中,采用两种控制方式对列车的加速度进行仿真,如图5、6 所示。

图5 基于PID控制器的加速度仿真Fig.5 Acceleration simulation based on PID controller
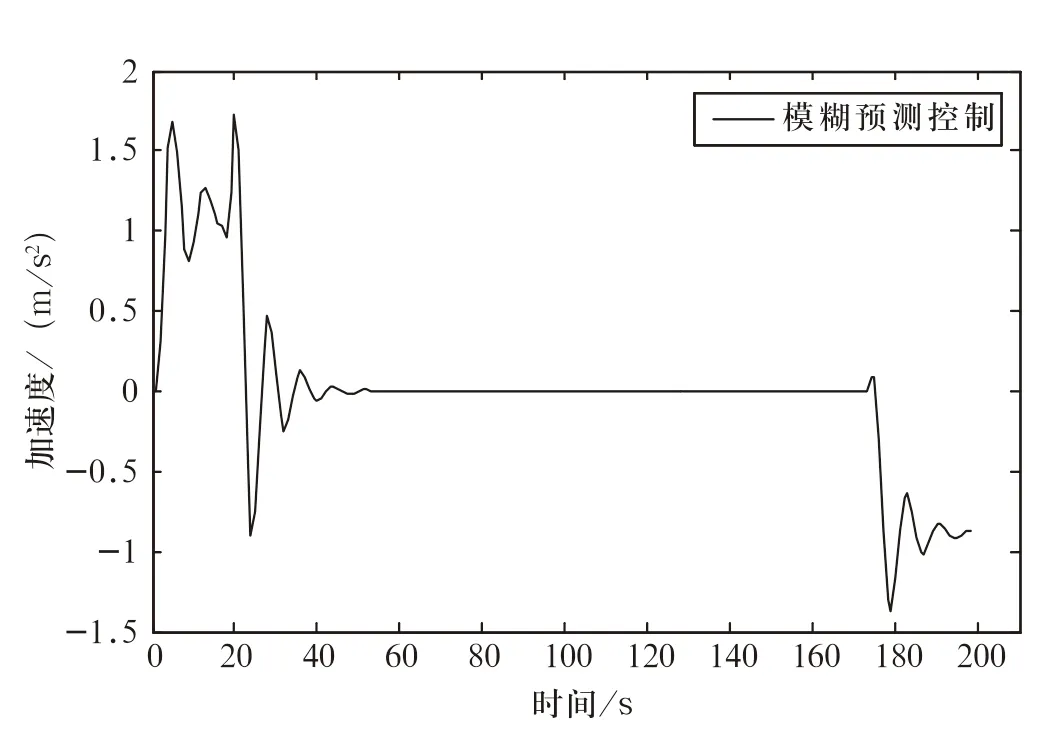
图6 基于模糊预测控制器的加速度仿真Fig.6 Acceleration simulation based on fuzzy predictive controller
通过图5、6 对比,加速度实际值范围1.2 ~1.4 m/s2,按照加速度a 大于1.4 m/s2作为乘客感到不舒适的标准。显然PID 控制加速度大于1.4 m/s2的持续时间比模糊预测控制要长,说明模糊预测控制在列车的启动和制动过程中对乘客的舒适度要高于PID 控制。
在列车匀速过程中,遇到弯道或者上下坡等干扰过程中,设计一个坡道实验:当列车运行到100 s时遇到上坡道,且在40 s 后遇到相同角度的下坡道,采用两种控制方式对列车的加速度进行仿真,如图7、8 所示。
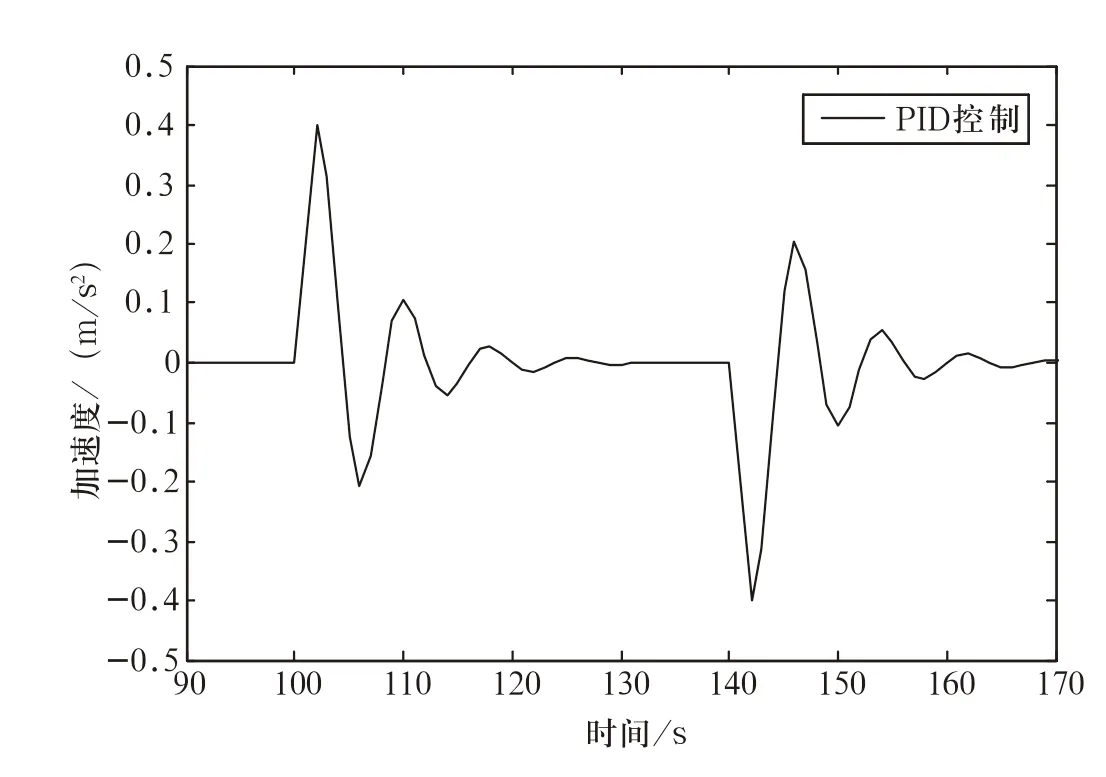
图7 线路有干扰时PID控制器对列车加速度的控制Fig.7 Control of train acceleration by PID controller when there is interference on the line
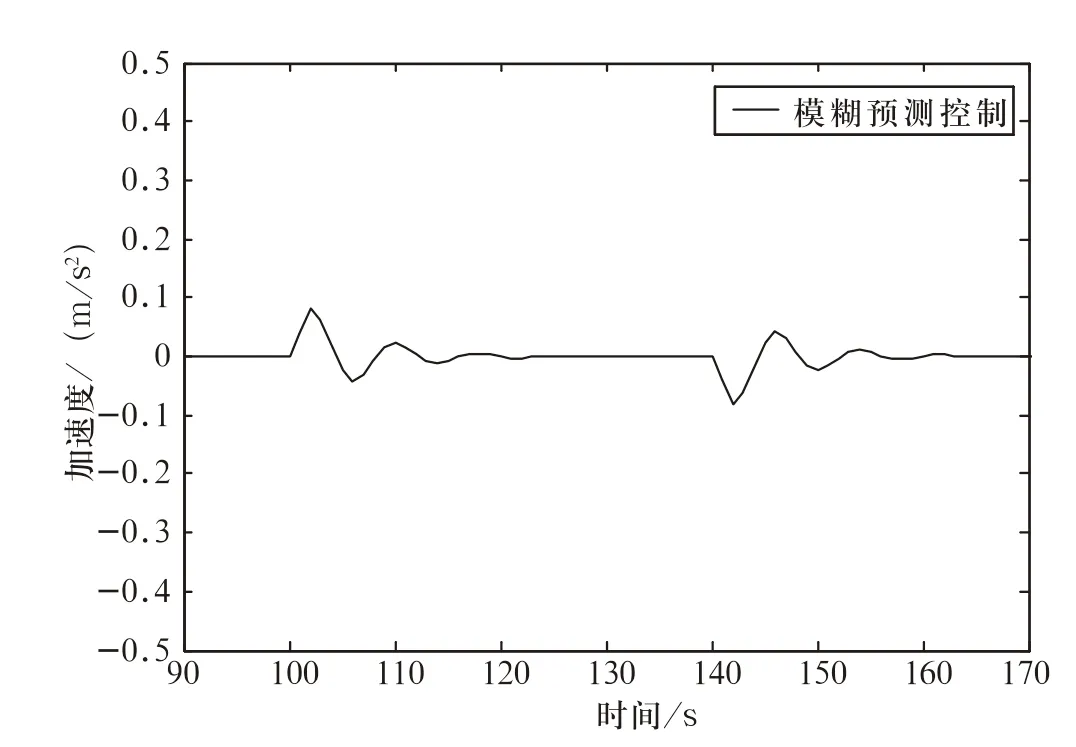
图8 线路有干扰时模糊预测控制器对列车加速度的控制 Fig.8 Control of train acceleration by fuzzy prediction controller when there is interference on the line
通过图7、8 对比,当列车遇到弯道或者上下坡等干扰过程中,PID 控制加速度出现较大且持续时间较长的尖峰,模糊预测控制加速度出现较小且持续时间较短的尖峰,说明模糊预测控制在列车匀速过程中对乘客的舒适度要高于PID 控制。
5 结语
本文采用了PID 控制和模糊预测控制算法对列车的加速度进行仿真,通过设置相同的列车模型、线路设计、列车信息对列车在启动、匀速、制动过程中进行对比研究,通过仿真结果可以看出采用模糊预测控制器在列车运行控制系统中有较好的舒适性指标。
