基于伪谱法的多级火箭总体/弹道一体化优化方法
2019-07-11陈铁彪王洪波佟泽友涂建秋
陈铁彪,王洪波,龚 旻,佟泽友,涂建秋
(中国运载火箭技术研究院,北京,100076)
0 引 言
随着军民融合国家发展战略的确立,商业航天、微/小卫星发射市场迎来了蓬勃的发展机遇。小型化、密集化的商业航天发射模式使得“固体动力+小型化+低成本”成为商业火箭迫切的发展需求。在低成本的研制需求下,降低起飞质量始终是商业火箭的优化设计目标。为降低起飞质量,工程上一般基于工程经验简化约束条件,再优化得到最优级间比等总体参数,优化精度相对粗略。为提高论证初期的方案准确度,减少方案设计的迭代次数,有必要精细化各专业约束,解决多约束条件下总体/弹道一体化优化的问题。
伪谱法在轨迹优化方面应用广泛并发展迅速,其原理是将状态变量和控制变量在一系列配点上离散,利用离散点为节点构造 Lagrange插值多项式来拟合状态变量和控制变量。通过对全局插值多项式求导来近似状态变量对时间的导数,从而将运动微分方程转化为代数方程,将弹道优化问题转化为非线性规划问题。正是这种转化使得伪谱法可以对飞行过程中的动态控制变量和静态总体参数同时进行寻优,进而得到最优级间比、最优滑行时间等总体参数和飞行过程中的最优控制变量。
1 伪谱法
轨迹优化方法主要分为直接法和间接法[1,2]。间接法的基础理论是经典变分法和极小值原理,通过将问题转化为哈密尔顿两点边值问题间接进行求解。直接法将最优控制问题通过一定离散策略转化成为非线性规划问题,然后采用非线性规划算法进行求解。根据转化方法的不同,大体分为直接打靶法和直接配点法。两种方法的区别是对动力学方程处理的不同,导致转化后的非线性规划问题结构不同。直接打靶法中需对状态微分方程进行连续积分,而直接配点法通过特定的隐式积分准则(局部配点)或函数逼近方法(全局配点)将动力学方程转化成了微分代数方程,非线性规划求解时速度迥异。直接法是应用最为广泛的轨迹优化方法,特别适合于飞行器的性能分析及总体设计。近年来,直接法中的全局正交配点法、伪谱法发展迅速,由于其特殊的离散格式,提高了多项式近似的精度,采用较少的计算节点就能获得很高的计算精度,广泛用于飞行器的轨迹优化。根据节点、配点和插值基函数的不同,伪谱法可以分为 Chebysgev伪谱法(CPV)、Legendre伪谱法(LPM)、Gauss伪谱法(GPV)和Radau伪谱法(RPM)。
弹道优化问题可以看作是 Bolza形式的最优控制问题[3],即在满足式(2)~(4)的条件下,最小化具有一般性的Bolza型目标函数:

运动方程约束为

过程约束条件为

端点约束条件为

式中 J为目标函数;φ为终端型性能指标函数;g为系统动态性能指标函数为积分型性能指标函数;t0为初始时间;tf为终端时间; x( t)为状态变量; x ( t0)为状态变量初值; x( tf)为状态变量终值;u( t)为控制变量;C为过程约束函数;φ为端点约束条件函数。
为便于插值点的确定,将时间区间 t ∈[t0, tf]分为K段子区间然后将每段子区间的通过式(5)转换为。
则每段子区间的状态变量、控制变量、运动方程、过程约束和端点约束相应转化为时间域 τ =[−1,+1 ]上函数。



利用LGR积分将目标函数近似为
运动方程(2)在LGR点的离散形式为

过程约束和端点约束在LGR点的离散形式为
通过上述一系列的数值近似办法,最终把Bolza问题转化为非线性规划问题,即求取每段LGR点处的状态变量和控制变量,在满足运动方程、过程约束和端点约束的情况下,使性能指标最小。
2 总体/控制一体化优化模型
2.1 飞行方案
本文采用三级固体运载火箭的飞行方案验证优化方法,飞行弹道分为“一级动力飞行+一级滑行+二级动力飞行+二级滑行+三级动力飞行”多个阶段,如图1所示。目标轨道为500 km圆形轨道,有效载荷为100 kg,整流罩为50 kg,整流罩在二级滑行段分离。

图1 飞行剖面Fig.1 Flight Profile
2.2 动力学模型
在地心惯性坐标系下建立火箭的动力学模型[4],地心惯性坐标系(右手系)的原点在地心 OE处, OEXE轴在赤道面内指向平春分点, OEZE轴垂直于赤道面,与地球自转轴重合。假设地球为均质圆球且火箭推力方向始终经过质心,则地心惯性系内动力学方程如下[5,6]:
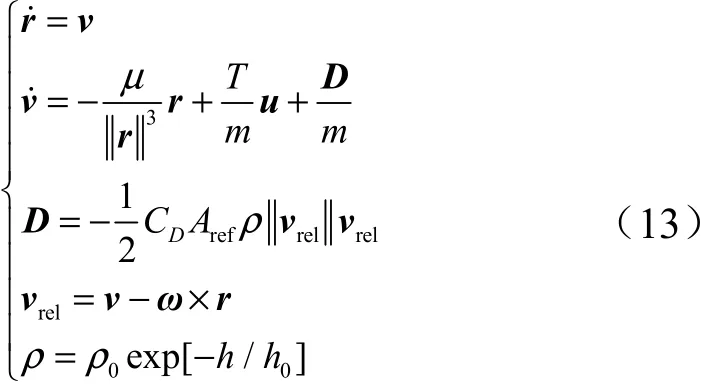
式中 r( t), v ( t)分别为火箭在地心惯性系下的位置和速度;m为火箭质量;为代表发动机推力方向的单位矢量;D为气动阻力; CD为火箭气动阻力系数; Aref为火箭参考面积; vrel为火箭相对地球速度;ω为自转角速度;ρ为大气密度;T为发动机推力。
假设采用理想固体火箭发动机,给定发动机推力和比冲 Isp后,则发动机的燃料消耗速度为

2.3 性能指标、约束条件及优化变量
以最小起飞质量作为优化的目标函数:

约束条件为矢量u的模长和终端入轨条件:
2.4 结构质量模型
运载火箭的各子级质量分为固定质量和非固定质量。固定质量包括整流罩质量、有效载荷质量、火箭壳体质量、发动机结构质量等(如图2所示);非固定质量主要是推进剂质量,占火箭总质量的绝大部分[7,8]。
弹头质量初步取为

式中pm为有效载荷质量;im为仪器设备质量;mm为末修动力系统质量。
发动机质量比σ可用箭体直径d近似为

尾段C1及级间段C2和C3质量为

式中 m壳为级间段圆柱壳体质量;m底为底遮板质量;m其他为其他附加质量。

图2 多级运载火箭结构形式Fig.2 Multi-stage Launch Vehicle Structure
3 仿真分析
以起飞质量最小为优化目标,对各级火箭发动机质量等总体参数和飞行过程中的控制变量进行寻优。优化后的总体参数、滑行时间和最小起飞质量为

式中 m1,2,3为一、二、三子级质量;d为火箭直径;t1,2为一、二级滑行段时间;Mmin为最小起飞质量。
目标轨道根数和关机点轨道根数如表 1、表 2所示。从表1、表2可以看出,关机点参数与目标轨道参数相差很小,满足入轨条件。运载火箭采用优化结果进行总体参数选择和飞行控制时,有效载荷入轨时燃料没有剩余。

表1 目标轨道根数Tab.1 Target Elements of Orbit

表2 关机点轨道根数Tab.2 Elements of Orbit at the Shutdown Point
整个飞行阶段分为3个助推阶段和2个无动力滑行阶段。各阶段的飞行高度、飞行速度变化曲线如图3、图4所示,助推段、滑行段各阶段过渡平滑。

图3 飞行高度变化曲线Fig.3 Flight Altitude Curve
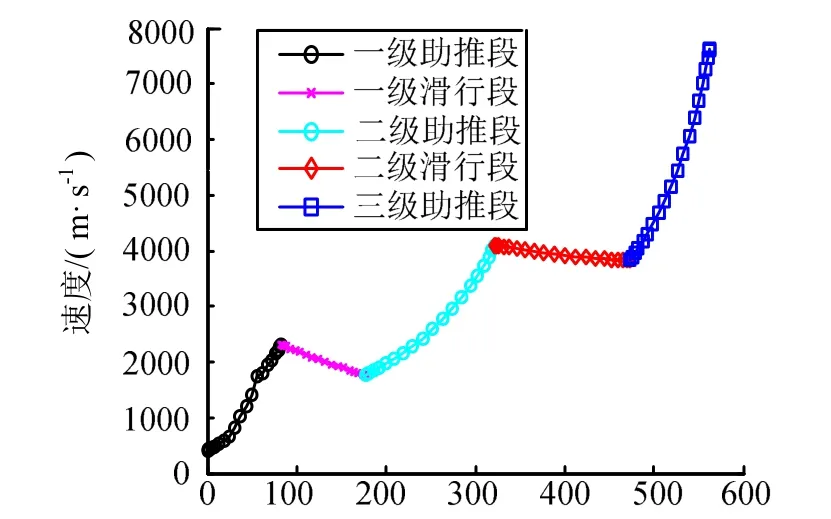
图4 飞行速度变化曲线Fig.4 Flight Speed Curve
起飞后 562 s,火箭以较高精度将有效载荷送入500 km 圆形目标轨道。起飞后 83.1~176.7 s、321.9~472.9 s为火箭的无动力滑行段,发动机推力为零,火箭飞行高度升高,速度降低,动能向重力势能转化。
4 结束语
本文建立了多级火箭的总体/弹道一体化优化模型,解决了弹道、气动和动力等专业约束下动静参数耦合优化问题,相比于传统火箭的估算模型,精细化程度更高,更贴近工程实际,同时在级间比、箭体直径和滑行时间等总体参数优化过程中考虑了控制系统的潜力,减少了火箭方案论证中迭代周期和设计成本。
