基于GPS/INS组合导航的无人机欺骗轨迹规划
2019-07-10王晓君
◆何 江 王晓君 康 娇
基于GPS/INS组合导航的无人机欺骗轨迹规划
◆何 江1王晓君2康 娇2
(1.太原学院计算机工程系 山西 030012;2.河北科技大学信息科学与工程学院 河北 050000)
为了有效地对无人机进行轨迹欺骗,本文在分析GPS欺骗式干扰原理基础上,结合GPS/INS组合导航系统的控制特点,进行无人机欺骗轨迹规划。首先,根据无人机飞行特点,建立初步机动性约束模型;其次,在此约束条件下规划无人机的欺骗轨迹,提出延长线和切线两种轨迹规划算法;最后根据所提出算法进行仿真验证与分析。结果表明:两种规划方法均可拉偏无人机飞行航迹,但是以切线设置的规划方法比以延长线设置的规划方法拉偏力度更大,最终得到的欺骗效果更好。
无人机;GPS/INS组合导航;欺骗式干扰;机动性约束;飞行航迹
0 引言
无人机(Unmanned Aerial Vehicle,UAV)即无人驾驶飞机,其飞行位置、速度、姿态等均由导航系统控制完成。无人机虽能为用户提高效率和节省成本,但针对其黑飞引发的种种安全事故,以干扰手段对无人机进行管制具有重要的研究意义。其中,欺骗式干扰使得无人机的接收机成功锁定到类似于原始卫星信号的虚假信号上,进而定位到错误位置[1][2]。
本文首先在研究转发式欺骗干扰原理基础上,根据无人机导航系统自身特点,对其欺骗过程进行研究,并建立机动性约束模型;其次在约束条件下对无人机欺骗轨迹进行规划,并提出两种规划方法,给出详细推导过程;最后对所提出规划方法进行仿真分析与验证。
1 欺骗式干扰
1.1 转发式欺骗干扰原理介绍
以伪距定位原理进行分析,转发式欺骗干扰即卫星信号其他信息未变,增加传播时延,使得接收机观测到的伪距发生偏差,以此实现干扰[3]。干扰机接收原始卫星信号,根据欺骗位置得到所需延时。将原始卫星信号经延时、功率放大后生成欺骗信号,由干扰机发射,使得一定区域内接收机接收到欺骗信号,进而测得错误伪距,实现错误定位,达到欺骗目的[4]。转发式欺骗干扰原理如图1所示。

图1 转发式欺骗干扰原理示意图




此外,在实际工程实现中不可能产生负延时,因此需要进行延时修正:

1.2 GPS/INS组合导航系统的欺骗
转发式欺骗式干扰使接收机的定位受到欺骗,这是UAV轨迹欺骗的第一步[5]。干扰设备通过一定手段(如雷达)得到无人机轨迹/位置信息,再根据状态估计,控制并调整欺骗轨迹/位置,使得UAV的GPS系统定位到错误位置;而UAV惯导系统通过提供的错误定位信息调整自身轨迹,进而达到轨迹欺骗目的[6]。
整个欺骗中,最核心技术即为欺骗轨迹的规划问题。本文研究中将UAV惯性导航系统的要求作为航迹规划中所需要满足的约束条件[7]、[8],建立初步的机动性约束模型:即假定无人机以固定速度朝固定位置飞行,那么无论无人机定位到何处,都将以此速度向目标点调整飞行。本文提出以下欺骗轨迹规划方案。
2 欺骗轨迹规划


图2 延长线规划方法示意图
2.1 延长线
如图2所示,无人机实际所在位置为0,下一时刻到达位置为半径=的圆上。干扰源处于A处,将无人机欺骗轨迹规划为A P0的延长线上,且由于速度约束,不同欺骗点间距离为,其具体实现过程如下:




(5)以此欺骗过程进行循环,最终实现欺骗轨迹的设定。
2.2 切线
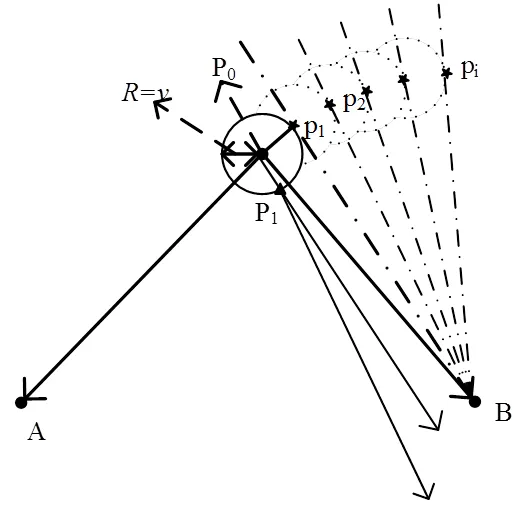
图3 切线规划方法示意图
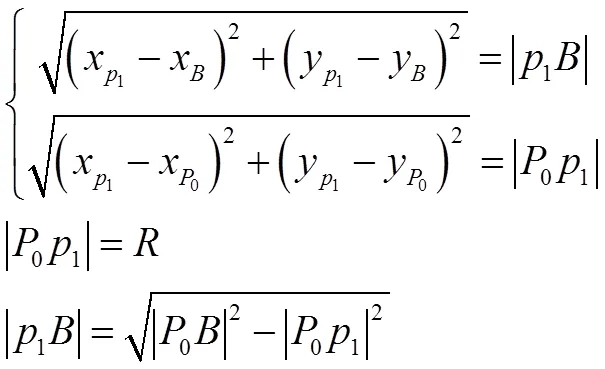
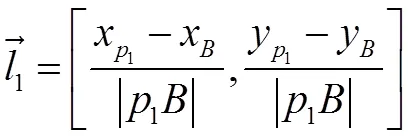
如图3所示,无人机欺骗轨迹规划为:第一欺骗位置为B到以无人机初始实际位置为圆心的圆做切线交点处,其他欺骗位置为B到以上一个欺骗位置为圆心的圆做切线交点处,且由于速度约束,不同欺骗点间距离为R,具体操作过程如下:


(5)最后以此过程循环,最终完成欺骗轨迹的规划。
3 仿真分析
根据上一节所提出方法,进行仿真验证。按规划中所提出的约束条件进行初始设置,代码实现过程中所涉及公式,最终得到如图4所示仿真结果。
仿真实验中,干扰源位置为图中星号所示,目标点位置如图中三角形所示,无人机位置为图中圆圈所示。而各六角形组成的曲线为所规划的欺骗轨迹,各正方形星组成的曲线为无人机实际飞行轨迹。因为整个过程是循环进行,所以在仿真中所设循环结束条件为:实时求得无人机实际飞行位置与干扰源之间距离,当无人机实际离干扰源距离由逐渐靠近再远离时停止欺骗。

图4 欺骗轨迹规划仿真图
将图中a)和b)进行对比,可以看到,两种方法均可对无人机进行一定角度的拉偏,但是以切线设置的规划方法比以延长线设置的规划方法拉偏力度更大,最终得到的欺骗效果更好。
4 结束语
本文以无人机GPS/INS组合导航为被干扰对象,在研究欺骗式干扰原理基础上,对其进行转发式欺骗干扰;根据自身特性,提出两种欺骗轨迹规划方法,并以Matlab仿真进行验证。模拟仿真过程以理论为依据进行,而模拟仿真结果在一定程度上验证了理论正确性,并为干扰的工程实现提供指导。
[1]JEONG, SEONGKYUM, and S S CHEN. GNSS interference signal generation scenario for GNSS interference verification platform[J]. International Conference on Control, Automation and Systems, 2015.13-16.
[2]S. JEONG, T Kim, and J KIM, Spoofing detection test of GPS signal interference mitigation equipment [C]// ICTI 2014: 2014 International Conference on ICT Convergence, pp. 2014:651-625.
[3]黄龙, 吕志成, 王飞雪.针对卫星导航接收机的欺骗干扰研究[J].宇航学报, 2012, 33(07): 884-890.
[4]李畅.无人机导航系统中的GPS欺骗干扰技术研究[D].南京:南京航空航天大学, 2017.
[5]李畅, 王旭东.基于轨迹欺骗的无人机GPS/INS复合导航系统干扰技术[J].南京航空航天大学学报, 2017, 49(03): 420-427.
[6]徐飞雄.卫星导航接收机矢量跟踪环路设计与实现[D].哈尔滨: 哈尔滨工程大学, 2017.
[7]袁超.应用于GPS软件接收机的抗干扰技术研究[D].南京:南京航空航天大学, 2014.
[8]王海洋, 姚志成, 范志良, 等.对GPS接收机的欺骗式干扰试验研究[J].火力与指挥控制, 2016, 41(07): 184-187
