飞机除冰车臂架辅助防碰撞系统设计
2019-06-29钟韬1都奎江1于勰2
钟韬1 都奎江1 于勰2
1. 威海广泰空港设备股份有限公司 山东威海 264200
2. 西安电子科技大学计算机科学与技术学院 陕西西安 710126
1 前言
飞机除冰车是寒冷地区机场及航空公司必备的飞机运行安全保障车辆之一。在进行除冰作业的过程中,除冰设备虽然会与飞机保持一定的作业距离,但是也会因操作不当或外界恶劣环境影响视线等原因导致除冰设备与飞机发生剐蹭事故。为了避免这类事故发生,技术人员采用了在高空作业舱安装超声波或者行程触须开关用于检测障碍物的方式,但是这种简单的保护措施并不能有效地保证除冰设备与飞机之间的安全距离,而且外界环境对超声波的检测存在一定的影响,尤其是雨雪霜冻等恶劣天气,会导致误报警的现象出现。
为避免除冰设备与飞机发生剐蹭事故,针对机场提出的保护要求以及对操作者在作业过程中的操作位置调研,笔者设计了一套除冰车臂架辅助防碰撞控制系统,该系统从音频视频多角度配合,多传感器检测,为操作者提供了多方面辅助的防碰撞措施。
2 系统结构组成
飞机除冰车臂架辅助防碰撞系统由臂架姿态检测系统、距离检测系统、显示系统、视频监控系统、语音报警系统5个子系统组成,并通过中央处理器对各个子系统检测到的数据进行算法计算并对执行机构的液压比例阀进行控制,使臂架在动作过程中能与检测到的障碍物始终保持安全距离。系统结构框图如图1所示。
图1 系统结构框图
2.1 臂架姿态检测系统
臂架姿态检测系统主要是为了检测除冰车在工作状态臂架的举升角度、转台旋转角度、内臂的伸出长度、工作舱倾斜角度,从而检测出臂架与车体之间的姿态数据,为距离检测系统提供明确的障碍物检测,区分检测的距离是车体与臂架的距离还是障碍物与臂架的距离,从而根据检测的距离数据进行臂架动作的限速和停止控制。臂架姿态检测系统结构如图2所示。
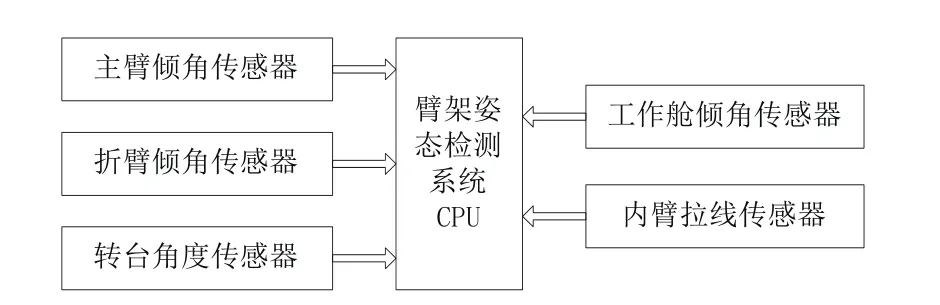
图2 臂架姿态检测系统结构框图
2.2 距离检测系统
距离检测系统是除冰车臂架辅助防碰撞系统的重要数据采集系统,为了使用合适的传感器进行距离参数的采集,反复进行了各种传感器对比,根据多方比较确定采用毫米波雷达及超声波传感器作为检测传感器。多种距离传感器对比如表1所示。
表1 多种距离传感器对比表
毫米波雷达传感器使用的是毫米波(在30~300 GHZ频域,波长为1~10 mm)。其中24 GHZ雷达传感器、77 GHZ雷达传感器主要应用于汽车防碰撞,毫米波雷达穿透雾、烟以及灰尘的能力强,抗干扰能力强,具有全天候全天时的特点。
此外毫米波雷达可以根据需要对检测的轴方向的检测物进行屏蔽设定,这样可以大大提高检测的精准度,通过与程序算法的配合可以有效降低误报警率。毫米波雷达检测范围及检测范围设定如图3所示。
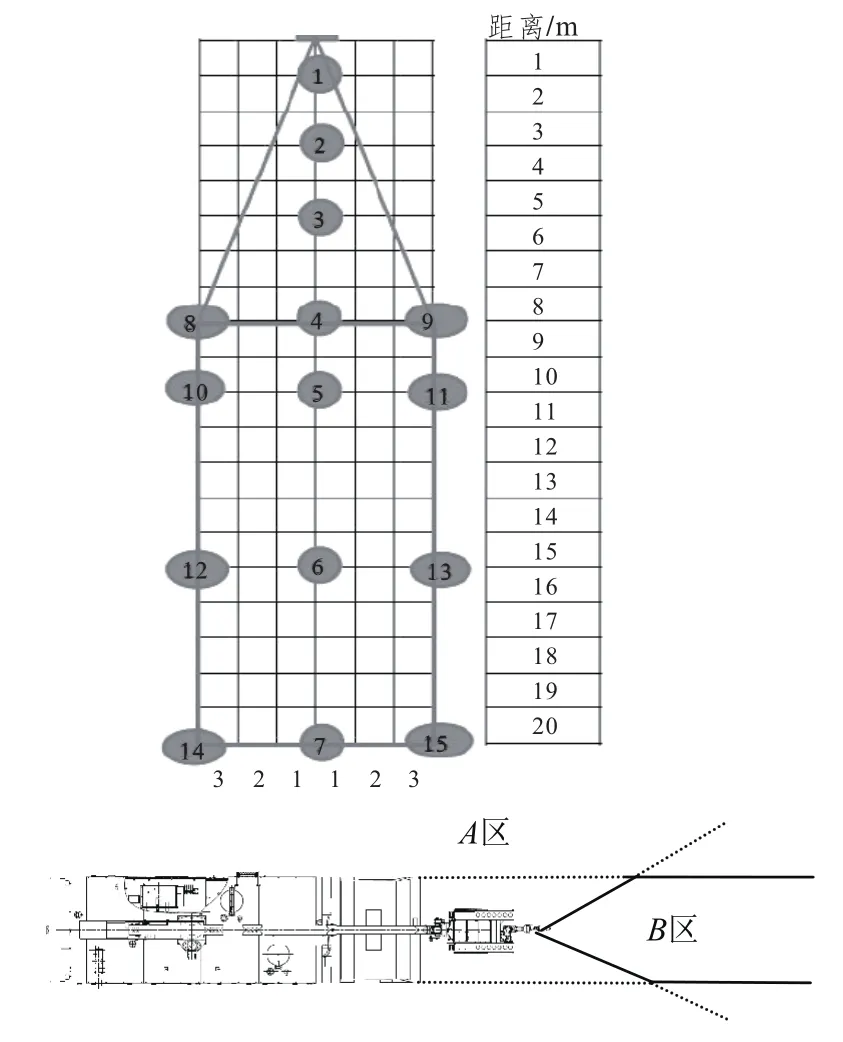
图3 毫米波雷达检测范围及检测范围设定
通过图3中传感器的安装位置及对毫米波雷达的轴向检测范围的设定可以将传感器检测到的A区障碍物忽略,只检测B区的障碍物。
在安装调试过程中,利用上位机检测软件可以在线监控雷达检测物体的信息,设定有效区域的检测范围,忽略无效区域的检测信号。上位机软件监控界面如图4所示。
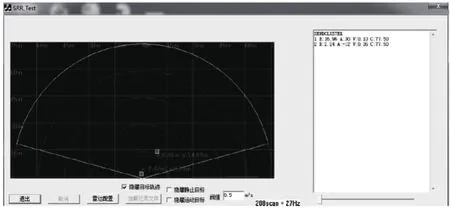
图4 上位机软件监控界面
2.3 显示系统
显示系统为飞机除冰车臂架辅助防碰撞系统提供了人机交互界面,通过该子系统可以使操作者在进行除冰作业过程中实时了解臂架的整个参数,包括臂架姿态参数值、距离检测传感器实时检测的距离值以及详细的报警信息,此外显示系统还以Flash动画的方式将整个除冰车的动作进行了演示,为操作者提供了一个直观的姿态界面。显示器Flash动画界面如图5所示。
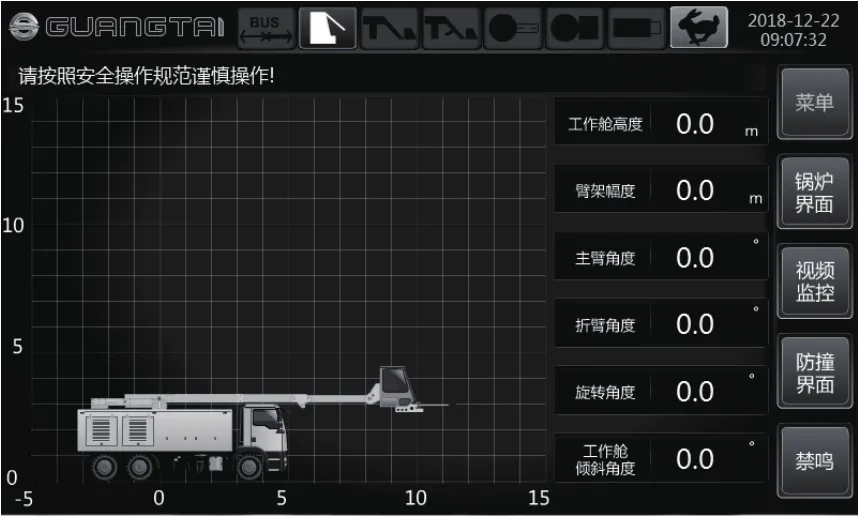
图5 显示器Flash动画界面
2.4 视频监控系统
视频监控系统是除冰车臂架辅助防碰撞系统的一个重要子系统,由于除冰车工作性质特殊,其工作时环境相对恶劣并且在遇到大风天气除冰液会附着在摄像头上,为了保证该系统的相对稳定性,视频监控系统仅以影像的形式通过独立的显示器为操作者提供盲区视频信号,但并没有将影像信号数字化传递给控制器参与主动控制。
该视频监控系统采集了两个位置的视频影像,一路普通摄像头安装在臂架根部,沿臂架方向监控;另一路鱼眼超广角摄像头安装在工作舱底部,当臂架举升后该摄像头将会为工作舱的操作者提供一个前后180°、左右110°的上帝视角影像,让操作者消除整个工作盲区,就像坐在一个透明的工作舱内一样。
2.5 语音报警系统
为了给除冰车臂架操作者提供一个优化的操作流程,该辅助防碰撞系统提供了语音报警系统,可为操作者实时播报详细的报警信息及解除报警的操作流程,当操作者在使用该系统遇到报警状况时,能够根据语音提示做出快速反应。
3 检测机构分布设计
相对于其他机场设备,除冰车臂架动作不确定性突出,为了保证在工作状态下除冰车臂架辅助防碰撞系统能够起到有效的主动防碰撞作用以及减少不必要的误报警状况,需要合理地确定传感器的安装位置。
通过对各大机场的调研及以笔者考察到的相关数据做支持,对各机务操作者的操作规范进行了深究,最终以B737和B787常用机型作为模拟对像确定了测距传感器的安装位置。模拟除冰作业如图6、7所示。
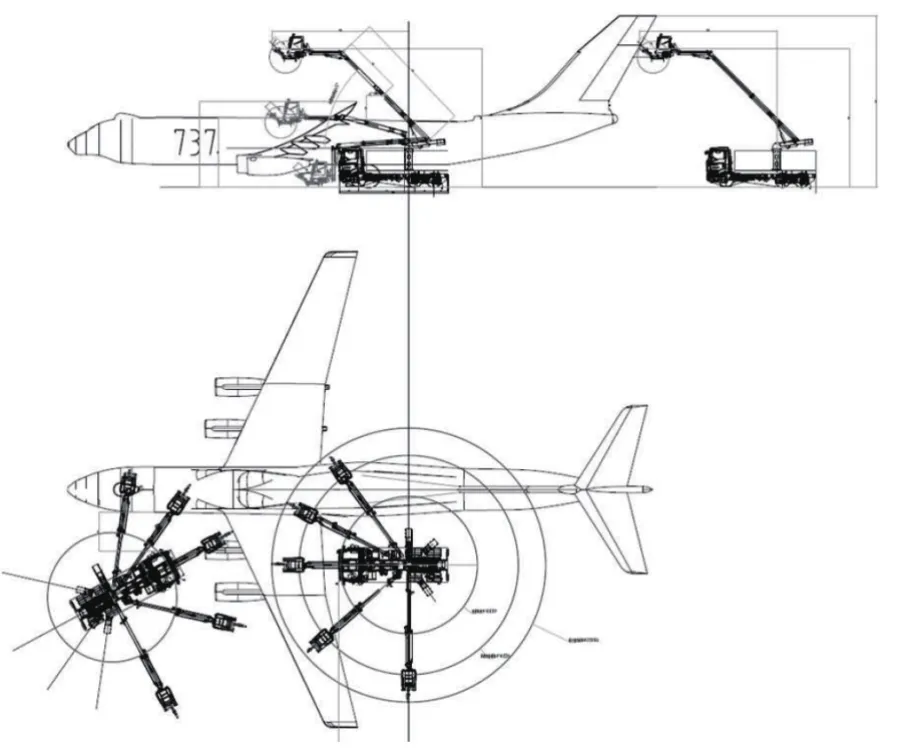
图6 B737模拟除冰作业位置图
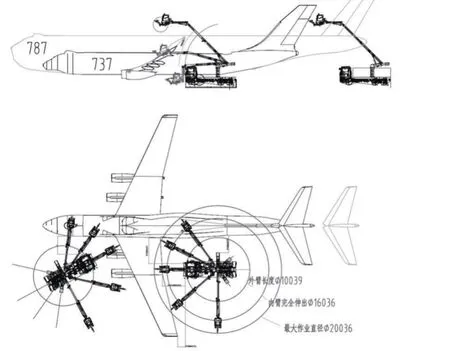
图7 B787模拟除冰作业位置图
经过模拟发现除冰作业时,除冰车臂架与飞机俯视重叠的部分只有工作舱及折臂,其他部分均不在碰撞范围内,遂臂架只对折臂、工作舱下端以及水炮前端进行防碰撞保护。距离检测传感器位置分布如图8所示。
4 系统控制算法解析
除冰车臂架辅助防碰撞系统分成3个距离检测部位,分别为折臂下端、工作舱下端以及水炮前端。由于臂架与底盘之间存在相对移动,各个部位的测距传感器需要判断检测到的距离数据是检测到车体的距离还是障碍物的距离,为了能够明确地鉴别真正的障碍物,就需要将臂架与车体的变化距离实时地进行测量和计算。臂架姿态检测系统就是为了解决这个问题,通过传感器的检测可以将臂架与车体的实际距离数字化,通过传感器在臂架安装位置的测量,再利用三角函数公式,就可以将安装位置与车体间随臂架角度变化的距离值计算出来,再与传感器检测到的实时距离值进行比较,当检测到的距离值小于计算的臂架传感器与车体之间的距离值时,就能够判断出有障碍物出现,此时就需要根据逻辑控制对臂架的动作方向及速度进行主动控制。距离检测传感器安装及检测范围如图9所示。

图8 距离检测传感器位置分布图
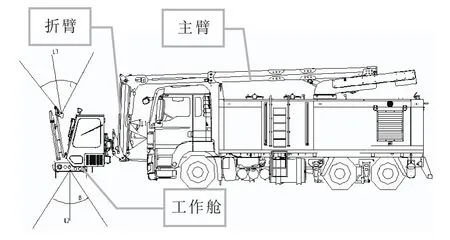
图9 距离检测传感器安装及检测范围
4.1 舱体下端障碍物检测判断
舱体下端障碍物检测判断公式:

式中,H为舱体距离地面高度;L1为主臂长度;α为主臂倾角;L2为折臂长度;β为折臂倾角;h为高度补偿值。
工作舱底部距离检测如图10所示。依靠臂架安装的姿态检测传感器可以依据公式计算出工作舱与地面之间的实际距离,工作舱底部距离检测传感器检测到的实际距离L与计算的距离H进行比较就可以判断出底部有无障碍物出现。
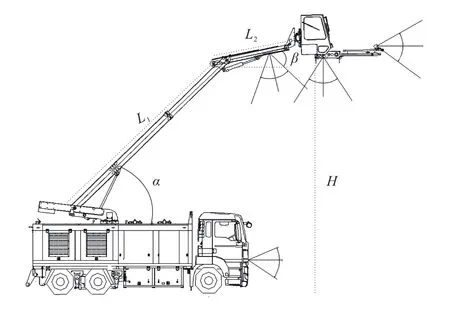
图10 工作舱底部距离检测
4.2 折臂下端传感器检测判断
折臂下端传感器检测判断公式:
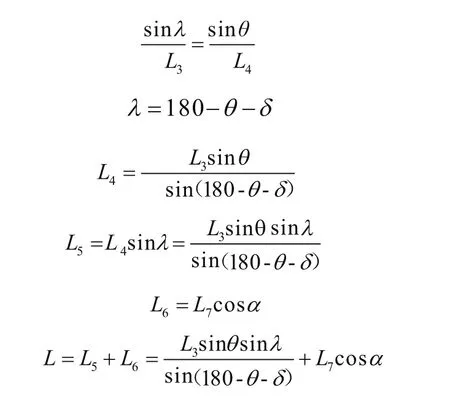
式中,λ为传感器检测极限角度与主臂垂线夹角;θ为折臂垂直夹角;δ为传感器极限角度与折臂夹角;L3为传感器在折臂安装点与折臂和主臂铰接点的距离;L4为传感器检测的极限最近距离;L5为传感器检测的水平距离;L6为内臂伸出的水平距离;L7为内臂伸出的实际距离;L为传感器距离车体的理论计算距离。
折臂下端距离检测如图11所示。L值为传感器与车体最近检测位置的计算值,当传感器检测的实际值Lr 图11 折臂下端距离检测 按照炮头前端的传感器安装位置,其检测范围只对轴向距离进行设定就可以满足检测距离的要求,其实际检测的数据值按照限速及停止距离进行控制即可。 在系统设计中设定当传感器检测到有障碍物,并且在1 m≤障碍物与臂架之间的距离<3 m的位置时进行减速控制,在检测到该距离小于1 m时进行动作锁定,使臂架无法进行任何动作。为了保证臂架与障碍物之间的绝对安全,当臂架动作锁定后只能通过手动按钮强制解除,否则即使传感器检测到障碍物距离在安全位置,臂架也无法继续动作。当然,当障碍物一直在小于1 m的位置时,即使使用手动按钮解除臂架锁定,系统也会立即再次锁定。 该除冰车臂架辅助防碰撞系统在实际应用中得到了充分验证,在整个调试过程中保护系统可以有效地保护臂架动作。在摄像头的辅助监控下,操作者可以以俯视的视角观察到整个臂架前端到末端的影像,为操作提供更多的便利。 但在特殊工况下也会存在误报警状况: a. 受恶劣天气的影响如大暴雨及特大暴雨情况下,传感器会感应到雨水,对传感器检测的准确度产生影响; b. 传感器的检测范围限制的影响,会存在保护的盲区,针对这个问题用摄像头作为盲区的辅助监控,但需要操作者主动操作判断; c. 该系统定位为辅助系统,还不能到达完全自主防碰撞的目的; d. 传感器在检测斜面或者弧形面时会出现检测距离与实际距离出现偏差的情况; e. 由于臂架动作的复杂状况,整个臂架的保护只按照正常作业环境对靠近飞机近的部位进行保护,其他部位不在防护范围,所以系统不能起到全臂架的防护。 对于上述出现的问题,后续会进行针对性地完善,提升防碰撞的等级。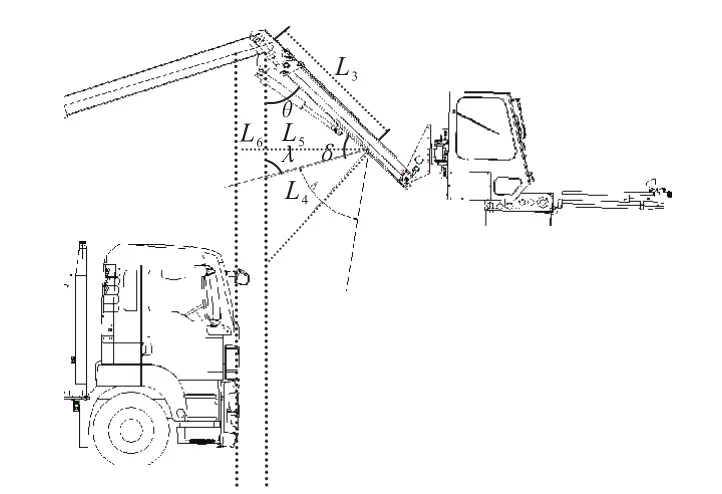
4.3 炮头前端传感器检测判断
5 结语