小松自动化机械手伺服控制
2019-06-27赵懿峰
赵懿峰
摘 要:自动化传送装置对于压机线来说,是体现整线技术能力的地方,同时它也决定了整条压机线的运行速度[1]。文章从自动化控制入手,对小松自動化做一个深入浅出的分析介绍,包括逻辑PLC、运动控制器、伺服等等。
关键词:逻辑;运动;虚轴;伺服控制;凸轮;实模式;虚模式
中图分类号:TG385 文献标志码:A 文章编号:2095-2945(2019)11-0108-02
Abstract: For the compressor line, the automatic transmission device is the place to reflect the technical ability of the whole line; at the same time, it also determines the running speed of the whole compressor line. Starting with automation control, this paper makes a simple analysis and introduction of Xiaosong automation, including logic PLC, motion controller, servo and so on.
Keywords: logic; motion; virtual axis; servo control; cam; real mode; virtual mode
绪论
纵观国内外压机线生产厂商,除了压机之间传送采用机器人,无外乎都采用了不同形式的专用的自动化传送设备。如舒勒、济二、小松等等。其中前两家虽然结构不一致,但无一例外采用了倍福、西门子、力士乐等控制系统进行最终的设计与使用。唯独小松还是采取了三菱的逻辑PLC和运动PLC的控制方式进行控制,结构简单且运行稳定[2]。本文从软硬件着手,对小松的伺服控制系统进行结构性分析介绍。
1 伺服控制结构
1.1 PLC硬件架构系统
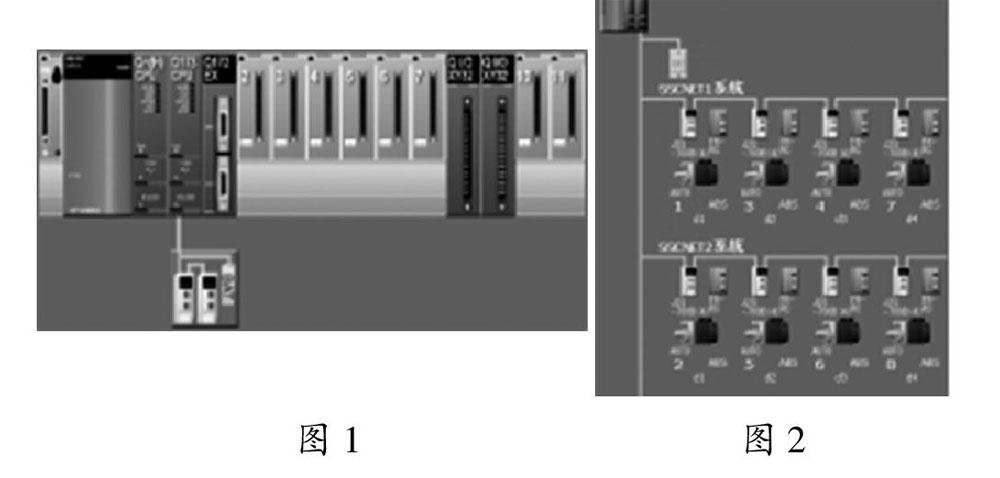
整个控制系统采用双CPU控制[3],一个用于逻辑运
算,一个用于伺服程序控制,两者各司其职,完成系统的控制。其中,逻辑PLC主要负责一般逻辑运算,同时包括一些初始化数据的设定,以及伺服程序的调用。运动PLC,主要设定伺服驱动器参数特性,同时根据运算PLC的调用启动相应的伺服程序。在整体架构组态中,两者PLC以及相应的I/O模块采用混编模式。整体来说一个逻辑PLC最多可带3个运动PLC,实现1+3的模式,进行伺服轴的进一步扩展。1.2 PLC软件控制系统
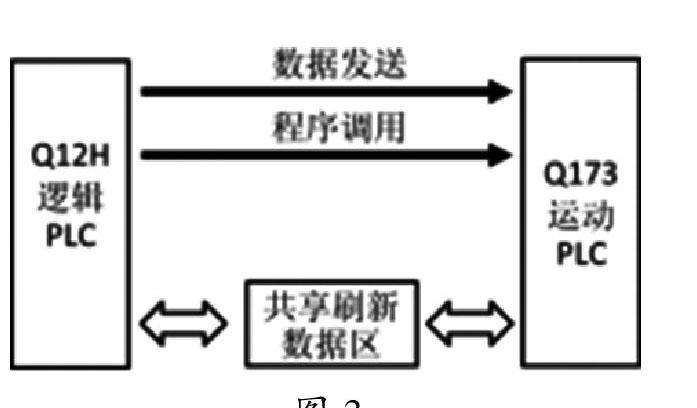
如前所述,逻辑PLC执行逻辑运算,运动PLC执行伺服控制运算[4]。两者数据交换如图3所述。在初始化等阶段或者某个运行操作前,逻辑PLC会通过指令形式将部分数据写入运动PLC内部数据点。可以看出,这些数据只是一次性的按需写入相应的运动PLC内部,在这完成后,逻辑PLC会发送一条指令来启动相应的运动控制程序。这些数据实时性要求不高,也是单向的数据发送。对于两个PLC之间,更重要的是共享刷新数据区。在这个区域内,逻辑PLC和运动PLC之间互相约定了一块实时刷新的共有数据区。这样,逻辑PLC内部数据可以被运动PLC直接读取,反正亦然,且实时有效。如逻辑PLC启动伺服程序后,相应运动PLC的伺服程序首先对启动条件进行判断,当判断OK,则允许伺服程序执行后续运动部分,并通过共享刷新数据区反馈启动运行状态。如果判断伺服条件不满足,则退出伺服控制,并反馈逻辑PLC退出状态。
2 运动控制模式
运动PLC的运行模式有2种,一种是实模式,另一种是虚模式[5]。所谓实模式,就是驱动对象为实际控制的驱动模块,即相应轴的伺服驱动器带动的电机,如图4所示51号伺服程序,其涉及到1、7、9三个轴按既定程序进行联动,相应的轨迹点、速度等通过变量进行给定,通过不停的罗列运动指令,来完成预先设定的轨迹;而虚模式,即系统直接控制输出的控制模块并非实际意义上的驱动模块、伺服电机,而是假象意义上的控制单元,这些单元本身并不存在,而是一些数字信号的组合。但是可以通过这些假想的单元按照某种关联去间接驱动设定好的实际物理意义上的伺服电机。这里所说的关联,便是小松程序里面用到的机械结构程序。如图5所示,虚15本身是一个虚拟伺服电机,伺服程序按照要求对其进行驱动,使得虚轴15的输出轴按照既定要求进行旋转输出,通过相应的离合器的耦合将输出轴信号传递到所需之处,图中,轴1的实际输入实际上是虚15和虚20两个虚拟伺服电机运动的差动合成,并通过带动的凸轮轴来驱动实际关联的物理输出轴:其中,当前进给值=行程下限值+行程值*形成比这里的行程比来自凸轮的设定。
这样,众多实际的伺服轴可以按需协同同一个虚拟伺服轴来完成各自的一个复杂的运行轨迹,从而满足实际控制需求。
从中可以看出,实模式和虚模式使用在不同场合,虚模式更适合用在需要复杂协同运动的控制需求中。
3 自动化控制程序
在了解了以上内容后,我们可以来看一下系统所涉及到的程序部分。在这里我们可以把主要程序分成以下几类:
A:自启动常驻内存——随PLC启动自己启动,并常驻内存运行。
B:自启动中断运行——随PLC启动运行一次,随后按中断时间间隔运行。
C:调用单次执行——由逻辑PLC调用并运行一次后退出。
D:调用常驻内存——由逻辑PLC调用后常驻内存运行,直至条件不满足退出。
E:调用中断运行——由逻辑PLC调用后按照中断时间间隔运行。
实际根据需要对程序特性进行设定,之后可以对程序进行编辑,设定程序的各项功能,比如由逻辑PLC直接调用的手动程序,其可以利用实模式进行编辑。或者通过模式切换将运行模式切换到虚模式,通过启动虚拟主轴来带动我们需要的各个实际控制轴。4 结论
本文通过对整个系统的分块介绍,使得大家对小松自动化机械手的控制有了一定的了解,对小松自动化系统整体框架有了一个初步的概念,包括硬件系统搭建,软件集成等等,为后续的研读打下了坚实的基础。
参考文献:
[1]王春生.冲压工艺设备的技术进步与发展[J].机械工人(热加工),2006(12):10.
[2](日)小松产机株式会社.小松产机产品技术样本[Z].2004.
[3]Q173CPU(N)_Q172CPU(N)用户手册-1410[Z].
[4]Q173CPU(N)_Q172CPU(N)SV13_SV22(运动SFC)编程手册-1411[Z].
[5]三菱运动控制器SV22虚模式[Z].
