新型功能材料发电技术及其应用进展*
2019-06-27曹建波鄂世举张海艇夏文俊
曹建波, 徐 阁, 鄂世举, 高 昭, 张海艇, 夏文俊, 周 武
(浙江师范大学 工学院,浙江 金华 321004)
0 引 言
根据能量转换机理的不同,可以将发电技术分为电磁式、光电式、压电式和静电式等类型.为了探索新的发电方法,可以将2种或2种以上不同的发电技术复合在一起同时进行发电.
工业生产用电最早开始利用的是化学能电池,直到今天的照明、交通、移动电子设备都仍然在使用电池.自Faraday 于1831年发现电磁感应以来,业界利用这个原理制造了大量的传统电机,现在电磁式发电机仍然是国民生产及生活中最主要的变电方式;我国的光伏产业技术成熟,未来将处于普及的态势,它是民用电的重要组成部分;压电片是一种高精度的机电换能器件,主要用于微机电产品中,采用它制成的压电线性驱动器、传感器可靠性高.压电材料具有能量密度高、无电磁干扰等优点,是复合俘能系统中的一种常见材料;静电式发电原理是利用可变电容进行机械能到电能的转换,常采用电活性聚合物(electroactive polymers,EAPs)作为电容的电介质.
复合发电技术是根据特定俘能环境结合不同发电技术的特点设计出俘能频带更宽、系统峰值更高的新型发电机.目前,国内外研究复合俘能发电技术处于实验阶段,且多是针对某一类发电技术进行优化.由于压电-电磁复合俘能技术比较容易实现,因而这种方式的发电技术占被研究的绝大部分;随着新材料技术的不断发展,EAPs与其他材料复合发电逐步成为研究的热点,如文献[1]介绍了EAPs与太阳能电池复合俘能系统,文献[2]介绍了EAPs与驻极体复合俘能系统.
1 发电技术理论分析
典型的机电换能系统有电磁式发电机、压电式发电机、介电弹性体发电机(dielectric elastomer generator,DEG)等.单一的俘能系统与发电技术是组成复合俘能系统的基础,研究其原理有助于优化俘能系统的设计.
1.1 电磁式发电技术
工业生产中的火力发电、水力发电、风力发电等形式,基本原理都是Faraday电磁感应定律.当通过闭合导线的磁通量发生改变时,导线内部会产生感应电流,回路中感应电动势的大小等于通过该回路的磁通量变化率.其表达式为
(1)
式(1)中:ε为感应电动势(V);Φ为穿过闭合电路的磁通量(Wb).
通常情况下,电磁式发电机可以分为3类:旋转式、谐振式和混合式.旋转式同步电机主要用作发电机,现代电力网中的巨大电能几乎全部由同步发电机提供.三相同步电机结构如图1所示,每相感应电势有效值为
E=4.44NfΦKw1.
(2)
式(2)中:N为绕组的匝数;感应电势频率f=pn/60,p为极对数,n为电机转子的转速;绕组系数Kw1=KyKq,短距系数Ky=cos(β/2),β为短距角,分布系数Kq=sin(qα/2)/[qsin(α/2)],通常Kq为0.92~1.00,q为每极每相槽数,α为槽距角.
图1 同步电机结构模型
谐振式电磁俘能器工作于振荡环境中,通常利用铜线圈与永磁铁磁场的相对运动来获取能量.图2是Toyota设计的直线式电磁发电机示意图[3].

图2 Toyota直线式电磁发电机
用等效磁荷[4]计算永磁铁磁场强度是一种简单而实用的方法,其磁场强度为


(3)
式(3)中:φm为标量磁位;σm为面磁荷密度;μ为磁导率;r为源点与场点之间的距离;s为永磁铁的极性端面面积.以永磁铁的几何中心为空间直角坐标系的原点,N-S极轴线方向为z轴,那么空间任意场点在该永磁铁系统中的磁场强度为
H=H+-H-=

(4)
式(4)中:H+,H-为两极磁荷产生的磁场强度;s+,s-为两极磁荷的源端面积;r+,r-为两极源点到场点的距离.磁感应强度B=μH,线圈中的感应电动势为
U=kBLv.
(5)
式(5)中:k为比例系数;B为磁感应强度;L为线圈长度;v为线圈的运动速度.
混合式电磁俘能系统是旋转式和谐振式的复合,它利用的是曲柄滑块机构将2种运动形式组合在一起,设计出效率更高的发电机.电磁式发电机是目前最稳定的发电技术,有关它的新结构设计、新材料制造将一直会是研究的热点.
1.2 压电发电技术
1880年压电效应被居里兄弟发现,当压电晶体在外力作用下产生形变时,其内部会产生极化现象,同时在受力的相对表面上出现正负相反的等量异种电荷,当外力撤出后就恢复到初始不带电的状态,这种现象被称为正压电效应,该现象的逆过程被称为逆压电效应,图3所示为正压电效应.生活中最常见的压电晶体是打火机中的压电陶瓷点火器,在点火时可产生3 000~6 000 V的电压,其电流量为μA级别.

图3 正压电效应
压电谐振式发电机一般以D31型压电陶瓷作为换能器,图4为一种典型的双晶片压电悬臂梁俘能器模型.

图4 压电悬臂梁
上述俘能器在环境激励为x(t)=Xsin(ωt)的作用下,悬臂梁的相对位移为z(t)=Zsin(ωt-φ),压电片所受到的力为
(6)
式(6)中:m为物块的质量;Z为振幅;ω为谐振激励的频率;φ为激励与悬臂梁运动的相位差.在压电学中,D31型压电片的表面电荷为
(7)
式(7)中:d31为横向压电系数;l为压电片的长度;h为压电片的厚度.压电片的等效电容为C=ε33A/h=ε33lb/h,其中:A为压电片的表面面积;b为压电片的宽度;ε33为介电常数.压电式悬臂梁俘能系统的输出电压可表示为
(8)
压电陶瓷(pbbased lanthanumdoped zirconate titanates,PZT)是一种重要的机电转换器,用它制成的俘能器输出电压高,但连续电流一般比较小.它易于制作的特点,使我们可以根据特定的俘能环境对其进行组合拓扑,设计出符合要求的发电系统.压电性是机电换能的一种现象,很多材料具有压电性,比较典型的高分子驻极体材料(polyvinylidene fluoride,PVDF)是20世纪70年代在日本发现的一种性能稳定、质地柔软的压电材料.
研究表明,经拉伸的PVDF压电薄膜在高温强电场下极化后具有高分子材料中最强的压电效应,其压电常数d比石英高10多倍,比PZT低,是PZT的10%~20%[5].PVDF的声阻抗为3.5×10-6Pa·s·m-3,仅为PZT压电陶瓷的1/10,它的声阻抗与人体肌肉的声阻抗很接近,且柔顺性好,便于贴近人体,因此,适合制造可穿戴的发电设备.
1.3 介电弹性体发电机(DEG)技术
最早关于EAP的研究报道[6]来自于1880年德国理论物理学家Roentgen,他发现了一端固定的橡胶带在电场作用下长度会发生变化,这种现象被称为Maxwell现象.最早开始研究介电弹性体发电机的是斯坦福研究所(Stanford Research Institute,SRI),图5所示为SRI研制的波浪能DEG[7].
DEG发电技术的原理是EAPs可变电容两电极上电荷在材料收缩的过程中,通过库伦力做功,将机械能转化为电能,其过程如图6所示.可变电容的大小为
C=ε0εrA/z=ε0εrV/z2.
(9)
式(9)中:A为电极面积;V为EAP的体积;z为介电弹性体的厚度.拉伸后电容C与原电容C0之间满足
(10)

图5 SRI研制的波浪能DEG

图6 EAP的发电原理
因为假设EAPs材料各向同性且不可压缩,其中λ为沿力方向长度的拉伸率,则电容厚度的变化率为1/λ.式(10)中:z0为机械拉伸前的电容值.假设在EAPs收缩时电荷守恒,Q=C0U0=CUEAP,则电容瞬时电压UEAP与原电压满足UEAP=U0/λ2.收缩时拉伸率λ< 1,在外加偏置恒电压的发电方式下,EAPs恢复原状态时电压是升高的.
介电弹性体是一种超弹性材料,其非线性的机电转换特性引起了众多学者的关注.关于其机电转换特性的建模,通常采用应变能密度函数[8]进行描述,应变能函数种类繁多,一般通过实验得出.例如Yeoh函数是一种适合描述EAPs的大形变、单向拉伸力学行为的应变能函数模型.
Yeoh根据实验提出了适合橡胶材料的大形变(应变大于200%)应变能函数
(11)
对系数C10,C20,C30一定要选择恰当,不然这些系数没有任何明显的物理意义.根据超弹性理论,介电弹性体(dielectric elastomer,DE)主应力可以通过上述应变能函数对主变形率求导获得,即
(12)
式(12)中,p为静水压力,由动力学边界条件决定.当沿厚度方向对介电弹性体施加电压时,材料所处的应力状态σi及拉伸λi如图7所示.
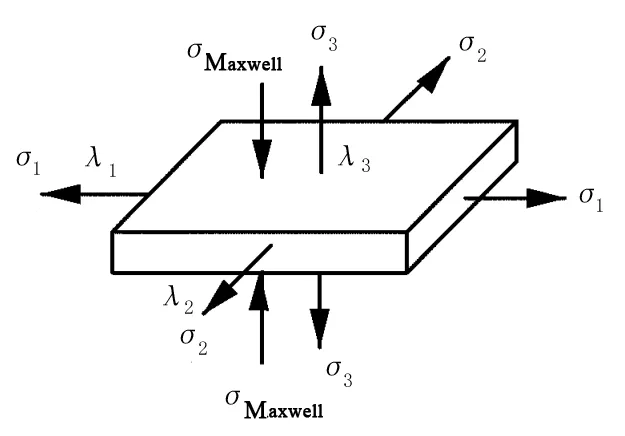
图7 DE应力和应变状态
设σMaxwell为材料所受的两平行柔性电极间的垂直等效Maxwell静电应力,则
(13)
式(13)中,S为受力面积.对于没有进行预拉伸且边界条件自由的介电弹性体膜,当在厚度方向施加电压激励时,其3个主方向的拉伸率λi和σi满足
(14)
式(14)中,ε3为DE厚度方向的应变.结合应变能函数,则3个方向主应变满足
(15)
所以静水压力为
(16)
DE厚度方向的应力为
(17)
所以DE的机电关系满足
(18)
EAPs开始是用于驱动,应用在机器人领域,如图8所示[9].

图8 四肢靠EAP驱动的昆虫机器人
近年来,研究人员利用该材料进行发电实验,设计了多种发电机.
DEG发电原理是可变电容发电,研究其机电转换关系的目的是设计精度更高的驱动器与提高发电机效率.DEG的技术难点在于其发电机结构的设计和新型电极材料的探索.
1.4 驻极体发电技术
驻极体是指一类能长期带电的电介质材料.其带电包括电介质本身极性单元取向形成的偶极子及内部离子的移动和由外部注入的空间电荷.当驻极体表面存在电极时,电极上会感应产生相应的补偿电荷.由于驻极体一般都是绝缘材料,补偿电荷通常不能与驻极体内部的电荷复合.
驻极体的制备通常有热极化法、光辐射法和电晕法等,电晕法是最常用的方法.该方法是利用高压电尖端放电,将空气中电离的带电粒子在电晕电场的作用下注入到材料中.图9所示为利用负高压放射电子制备驻极体的方法,其中在材料表面放置金属栅网,有助于电子在驻极体中进行均匀分布[10].

图9 电晕法制备驻极体
驻极体发电机的工作原理是静电感应效应,当发电机在原始状态时,上电极、驻极体、下电极三者的电场处于平衡状态.当基板被机械力压缩时,感应电荷通过外电路在两极板间重新分配,形成电流.当外力撤去,两基板恢复原来状态时,电荷回流构成新的平衡.该型发电机产生的电为交流电,可以外接单相桥式整流滤波电路,将其变成直流电供负载使用.图10所示为一种驻极体原型机[11],该原型机由悬臂梁和驻极体材料组成,驻极体跟随悬臂环境振动.其中梁-质量系统传递机械能,电极-驻极体-空气-反向电极构成机电传递结构.

图10 驻极体原型机
1.5 现阶段发电技术特点
电磁式发电技术无需外部电源,输出电流高、输出阻抗小、机械阻尼小、系统鲁棒性高且可持续运行.但其小型化比较复杂,装配技术难度大,工作在低频状态时,效率低且存在线圈损耗;压电式发电技术输出电压高、电容值大、能量密度高.但输出电流小、输出阻抗高,在低频环境下,压电材料存在自放电现象;静电式俘能系统便于加工制造,该发电技术倾向于工作在低频率,符合可穿戴发电技术的要求.静电式发电技术通常需要额外的电源来提供偏置电压,当电荷聚积到一定程度时可向外输出较高的电压.表1简要介绍了不同发电方式下的相关技术参数[12-13].

表1 发电技术的特点对比
2 新型发电技术复合应用
复合俘能系统是将2种或2种以上发电机的技术结合在一起构成的机电换能器,压电-电磁俘能器是常见的机电换能器.随着新材料技术的发展,多种发电技术的复合成为研究的热点.
2.1 PZT-PVDF复合发电
麻省理工学院Joe Paradiso团队在1998年制造了一种收集运动能量鞋,并于1999年对其进行了优化[14].改进后的运动鞋由于对行走没有影响,所以压电单元能有效隐藏在鞋子里,图11所示为一个集成压电元件放置于标准运动鞋可拆卸的鞋垫下面.

图11 MIT鞋底能量收集实验
收集能量来源于放置在脚跟部分的压电陶瓷和脚趾部分的16层PVDF压电薄膜,由于受机电转换效率的限制,实验获得的平均功率比较低.在标准步行过程中,8.3 mW能量来源于脚跟,1.3 mW的能量来源于脚趾.
2.2 压电-电磁复合发电
在最近的研究中,Ibrahim等[15]利用不同长度压电悬臂构造成阵列,拓宽了VMPG(vibration micro power generators)系统的频率范围,其中各悬臂相互串联,磁铁采用NdFeB,设计尺寸为14.0 mm×12.5 mm×8.0 mm,具体由图12所示.该样机SiO2基片采用5个掩膜进行加工,样机在3.5~4.5 kHz内输出电压和功率分别为10.0 mV,0.4 μW.该型压电-电磁发电系统集成在一块PCB板上,其可行性得到了实验的验证,随着半导体技术的发展,未来IC自供电技术成为可能.

图12 VMPG系统
2.3 DEG-光伏复合发电
介电弹性体发电机(DEG)在将外部机械能转化为电能时,EAPs可变电容需要外加偏置电压.在进行DEG发电的实验阶段一般采用直流电压源提供偏置电压,而在实际的俘能环境中,直流电压源一般难以获得且更换困难.
奥克兰大学的研究人员[1,16-17]设计了一种利用太阳能电池给EAP提供偏置电压的俘能器,具体由图13所示.

图13 奥克兰大学研制的DEG
图14是一种DEG电荷泵的原理图,由太阳电池组、自偏置电路(self-priming circuit,SPC)及DEG构成.当处于初始状态时,太阳能电池产生的电流给SPC、DEG补充电荷,此时SPC处于小电容状态.当DEG被拉伸时,DEG电容变大,此时太阳能电池继续给全电路供电;当DEG收缩时,DEG电容变小,DE弹性恢复力克服库仑力做功,电压会有小幅抬升.经过多次循环,SPC和DEG中的电荷积累到某个临界点,在一次DEG的收缩过程中,将通过二极管泵送电流给47 pF的电容.
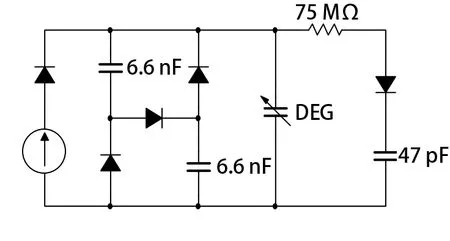
图14 DEG外围电路
2.4 EAP-驻极体复合发电
驻极体的永电性可以为介电弹性体发电机提供一个初始偏置电场,文献[2]提出EAPs与驻极体几种复合形式.如图15所示:(a)是一种最基本的复合单元,由于驻极体在介电材料中分布不均匀,该复合单元的输出功率比较低;(b)是一种改进型的复合形式,该结构将驻极体镀在介电材料的表面上,由于驻极体刚度一般比较大,限制了材料的应变.驻极体的杨氏模量比介电弹性体高10倍,在相同的应变条件下,需要更多的机械能,这增加了弹性材料俘能的成本;(c)将驻极体离散分布于介电弹性体的表面,该形式既保持了电场的均匀分布,同时也保证了复合单元的柔韧性.

图15 EAP-驻极体复合单元
3 发电系统的结构设计与趋势
俘能系统的结构是复合发电技术中的重要组成部分,在对发电材料性能研究的基础上,发电机的设计最终落实在结构设计上.
3.1 复合结构分析
复合发电系统结构的设计更多关注的是机械能的传递与转化,本节分析了4种与复合俘能系统设计相关的机械机构[18],如图16所示.
图16(a)是杠杆机构,它由1个链节和1个支点轴组成.由于链节是相对支点轴作旋转运动,所以不是一个理想的直线运动.事实上,输入振幅远小于链节的长度,因此,其可近似为直线振幅放大器.
图16(b)是剪式联动放大机构,该机构能提供完整的直线放大,但它的机械增益和输入能力相对于杠杆系统保持不变.
图16(c)为通过2个齿条、齿轮耦合机构,将线性运动转换为旋转运动,反之亦然.该机构主动齿轮、从动齿轮锁定在同一根轴上,从动齿轮的直径比传动轴大,从而放大了振幅.这种机构可适应无限的输入振幅,同时输出振幅也保持无限输出.
图16(d)所示的机械放大器由1个齿轮、齿条机构和圆盘形曲柄滑块机构组成.在该系统中,在线性运动转换为旋转运动后,由于角速度保持不变,对于直径大于小齿轮的圆盘,其线速度增加.然后,通过曲柄滑块机构将旋转运动转换成直线运动.这个机制的特点是无限输入,输出被限制在圆盘直径范围内.
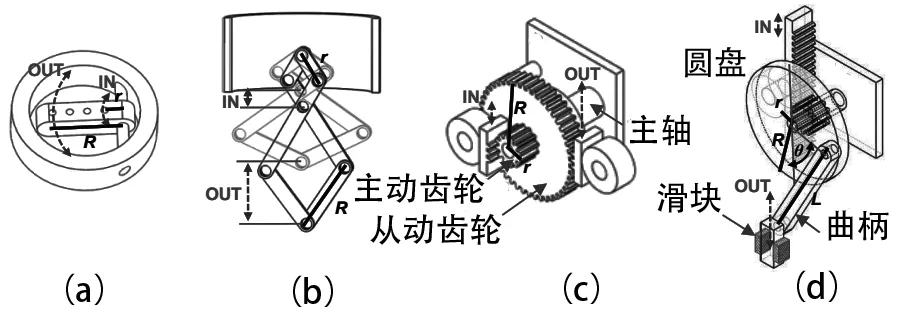
图16 复合发电系统结构
3.2 MEMS系统
集成电路和现代制造技术的高速发展,未来MEMS(Micro-Electro-Mechanical System)的研究将会是一个热点.随着人工智能时代的来临,可穿戴智能设备的自供电技术展现出新的前景.
图17为自动上发条的电子表[19],由ETA机芯、摆轮、发条、微电机等组成.微型发电机在其最佳旋转速率为15 kr/min时,经过50 ms就能产生6 mA电流,最高可达到16 V的电压,产生的电能将存储在电容中.

图17 ETA设计的自动石英手表

图18 芯片级发电机
图18是一种芯片级的微型发电机及其单相电压的输出波形[20-21].实验证明,超微永磁发电机在转子转速为392 kr/min条件下最大开路电压有效值为51.0 mV,对应一个估计直流输出功率3.6 mW.这些结果表明了制造芯片级、低功率的发电机是一种可行方案,进一步研究潜力大.
4 结束语
目前复合俘能发电技术大多处于实验阶段,复合俘能器的关键技术在于机械结构的设计和新型材料的应用.本文主要研究了以下3方面:
1)研究了现今的主要发电技术,分析了其发电原理.论述了各种材料的机电转换关系,给出了基本发电机模型.
2)研究了复合发电技术,综合比较了单一发电机技术与复合发电技术的发电机理,发现复合发电技术输出功率更高、俘能频带更宽.随着新材料的不断发现,新型材料发电将会是研究的热点.
3)发电机结构设计是发电技术应用中的一个重要环节.随着人工智能的发展和可穿戴设备的完善,未来可再生能源技术及MEMS技术将会是研究的热点.
