基于二维修正组件的弹道修正弹稳定性分析与仿真研究
2019-06-25柯知非宋卫东
柯知非,高 敏,王 毅,宋卫东
(陆军工程大学石家庄校区,河北 石家庄 050003)
弹道修正弹是指利用弹道修正技术对传统弹药进行信息化改造的弹药,它的特点是可大量装备部队、具有一定打击精度、高效费比。问世之后,弹道修正弹便成为各国关注和争相研究的热点,国内外许多专家学者也就弹道修正弹的设计提出了许多不同的方案[1-3]。
在各种设计方案中,需要解决的核心问题是要在满足弹丸的稳定性的基础上最大限度的提高修正能力。而由于修正执行机构的存在,弹丸的气动布局会发生较大的改变,必须对其稳定性进行考核与评估。
旋转稳定弹丸无控状态下的稳定性分析一般都借助美国学者Murphy所建立的角运动理论,通过陀螺稳定因子和动态稳定因子等判断普通榴弹的稳定性。
揭涛等针对CCF模式的双旋榴弹建立了多刚体弹道模型,并直接用传统的稳定性判据对弹丸的稳定性进行了分析[4]。然而,传统的稳定性判据是否能直接判断双旋榴弹的稳定性需要研究。王志刚、李伟等针对基于固定鸭舵的弹道修正火箭弹进行了弹道建模,并通过角运动方程分析了火箭弹的稳定性[5-6]。常思江、王中原等通过数值仿真的手段检验了弹丸有控和无控状态下的稳定性[7],之后,常思江对共振稳定性进行了研究,对大攻角条件下的前体转速闭锁问题进行初步分析,导出了该弹发生转速闭锁的稳定方位角及临界攻角表达式[8]。钟扬威等基于Kane方法建立了双旋弹飞行动力学模型,并通过编程对双旋弹的无控和有控运动特性进行了仿真分析,得出双旋弹无控时以小迎角稳定飞行;有控飞行时弹体产生配平迎角,且纵向和横向修正会产生交叉耦合的结论[9]。张衍儒等通过分析双旋静稳定弹角运动方程,讨论了共振不稳定的特性,得出固定翼鸭舵的转速及双圆运动频率影响攻角运动[10]。
笔者在前人对修正弹弹道模型研究的基础上,建立二维弹道修正弹刚体弹道模型,描述出弹丸的动力学和运动学关系。通过稳定性理论和判据分析刚体弹道模型,得出满足稳定性应具备的条件,并研究了有控与无控状态下舵结构参数对稳定性的影响。
1 弹道建模
发射系内建立的运动方程组用于弹道解算。首先建立弹丸质心的运动方程组,然后依据修正组件和弹体的绕弹丸质心的转动描述弹丸绕质心转动的方程组,依据两刚体的运动学关系可将所建立的方程简化,建立描述弹丸运动状态的弹道模型。
1.1 弹丸受力分解
修正组件和弹体的马格努斯力垂直于总攻角平面,而马格努斯力矩在攻角平面内,分别将其转换到准弹体坐标下,得表达式如下:
(1)

1.2 发射系下运动方程组的建立
飞行过程中,弹丸的运动状态通过弹丸质心的运动和绕质心的转动来描述。将弹丸质心的运动描述在发射系下,即弹丸质心的速度、位置信息均在发射系下投影,利用该方式进行弹道解算,便于与实际飞行状态下的弹丸速度、位置信息相对比,是当前弹道解算的常用方法。将弹丸绕质心的转动建立在准弹体坐标系下,形式最为简单。建立描述弹丸运动状态的运动方程组如下:

(2)
式中所使用的坐标系及角度定义可参考文献[11],Mfax4、Mafx4分别为修正组件和弹体间相互作用力矩在准弹体系x4轴上的分量,该力矩包括轴承间的摩擦力矩和制动过程中的控制力矩。
1.3 绕弹丸质心的转动方程组
1.3.1 弹丸绕质心转动的动力学方程组
弹丸绕质心运动的动力学方程组为:
(3)
式中:Jfx、Jfy、Jfz为修正组件相对弹丸质心的转动惯量在准弹体上的投影;Jax、Jay、Jaz为弹体相对弹丸质心的转动惯量在准弹体系上的投影;ωfx4、ωy4、ωz4为修正组件的角速度在其准弹体系上的投影;Mfx4、Mfy4、Mfz4为修正组件所受气动力矩在准弹体上的投影;Mfax4、Mfay4、Mfaz4为弹体对修正组件作用的力矩(包含控制力矩)在准弹体上的投影;ωax4、ωy4、ωz4为弹体角速度在其准弹体系上的投影;Max4、May4、Maz4为弹体所受气动力矩在准弹体系上的投影;Mafx4、Mafy4、Mafz4为修正组件对弹体作用的力矩(包含控制力矩)在准弹体上的投影。
1.3.2 弹丸绕质心转动的运动学方程组
弹丸姿态使用俯仰角φ、偏航角ψ、修正组件滚转角γf和弹体滚转角γa4个变量来描述。设准弹体坐标系相对于地面发射系的转动角速度为ω′,整理后,可得:
(4)
2 稳定性分析
弹丸飞行稳定是进行弹道特性分析和控制系统设计的前提。安装二维弹道修正引信后,弹丸的飞行包括有控和无控两种状态。无控状态下飞行的弹丸近似于在普通弹丸头部施加一周期与修正组件转速相同的扰动力,而有控状态下飞行的弹丸近似于普通弹丸头部施加一方向和幅值变化的控制力,该力将降低弹丸的稳定性。
2.1 陀螺稳定性
旋转稳定弹丸是静不稳定弹丸,即弹丸所受气动力的压心在弹丸质心之前,气动力形成的静力矩将使弹丸轴线偏离合速度形成攻角,称该力矩为翻转力矩。弹丸的高速旋转使其具有定轴性,保持了弹丸稳定性。
在所有的气动力矩中翻转力矩占主导地位,只考虑静力矩项的角运动方程的齐次方程为
Δ″-iPΔ′-MΔ=0.
(5)
可得方程特征根为
(6)
令Sg=P2/4M,称其为陀螺稳定因子,则弹丸稳定的条件为Sg>1.
当弹丸处于无控状态时,陀螺稳定因子可整理为:

(7)
即陀螺力矩项的减小量大于静力矩项的减小量,造成陀螺力矩项与翻转力矩项的比值减小。因而,与普通榴弹相比弹体的转速需更高才能使弹丸稳定,即弹丸的稳定性在安装修正组件后有所降低。
当弹丸处于有控状态时,陀螺稳定因子可整理为:

(8)
由式(8)知,有控状态下弹丸的静力矩项比普通弹丸增加了翻转力矩项kc,使静力矩项增大,从而造成陀螺稳定因子的减小,降低弹丸的稳定性。
图1为修正弹在无控和有控状态下的陀螺稳定因子Sg的曲线。图中,两条曲线在全弹道上均满足Sg>1的陀螺稳定条件。

2.2 追随稳定性
在弹丸飞行过程中,由于重力作用弹丸的质心速度将会逐渐向下偏转,但其不会使弹轴偏转,因而产生俯仰平面内的攻角。必须存在作用在弹轴上的力矩才能使弹轴跟随弹丸合速度方向的偏转,否则,弹丸总攻角将增大,导致近弹现象的出现。
对于旋转稳定弹,在弹丸飞行过程中将出现动力平衡角,且该角在水平方向的分量约是竖直方向分量的10倍,在其产生的气动力作用下产生垂直于弹轴向下的翻转力矩,迫使弹轴向下偏转,形成弹轴跟随质心合速度的现象。然而,动力平衡角过大将使弹丸稳定性降低,飞行特性变差,散布加大,甚至使射程大大减小。为使弹丸具有良好的弹道特性,需要限制动力平衡角的大小。动力平衡角最大值出现在弹道顶点附近,故只需限制最大射角发射弹丸时的弹道顶点处得动力平衡角即可。
图2为修正弹在有控和无控状态下的总攻角曲线。

需要指出的是,弹丸以52°射角出炮口,在40 s起控,且其控制角稳定在180°直至弹丸落地。图2中,弹丸起控后总攻角曲线出现了较大的抖动,随着弹丸的继续飞行抖动幅值逐渐减小。总攻角曲线的平均位置即为弹丸的动力平衡角,故有控状态下其动力平衡角不会超过3°,无控状态下动力平衡角不超过2.7°,说明该弹丸满足追随稳定条件。
2.3 动态稳定性
考虑弹丸所受的全部气动力和气动力矩时,弹丸角运动方程的齐次方程的特征根的表达式如下:
(9)
当弹丸处于无控状态时,

(10)
当弹丸处于有控状态时,

(11)
令
(12)
式中,Sd为动态稳定因子。
通过讨论Sdd的值即可判断弹丸的动态稳定性。图3和图4分别为无控和有控状态下动态稳定因子Sd和Sdd的曲线。图4中两条曲线均在0上方,说明该弹丸在有控和无控状态下均处于稳定状态。

2.4 共振稳定性
在弹丸的无控飞行中,修正组件在来流作用下绕弹轴自由旋转。由于修正组件气动外形不对称,将产生周期性作用力。若该周期性作用力的频率与弹丸自由摆动周期相同将发生共振,使弹丸攻角急剧增大,造成弹丸失稳,称该种不稳定为共振不稳定。
弹丸飞行过程中,在某一较小时间段内弹丸合速度及所受气动力不变,角运动方程为常系数线性微分方程,其解满足叠加性,故可单独讨论控制力项对角运动的影响。
无控状态下,仅考虑控制力矩项的角运动方程为
Δ″+(H-iP)Δ′-(M+iPT)Δ=B′eiχs,
(13)

可得方程的通解为
Δ=C1e(λ1+iω1)s+C2e(λ2+iω2)s+Δt.
(14)
随弹丸的飞行二圆运动将衰减至消失,仅剩下周期性气动力产生的受迫圆运动。定义修正组件不旋转时,弹丸在常值干扰力下产生的攻角为定常攻角,易得该定常攻角为
(15)
定义稳定强迫振动的振幅与定常攻角的幅值的比值为放大系数,则有

(16)

图5为无控和有控状态下角运动的频率曲线。图中,无控和有控状态下的快慢圆运动频率分别相等(误差较小),快圆运动频率ω1不超过0.5 rad/s,慢圆运动频率ω2小于0.1 rad/s.

为维持弹丸的稳定性,弹体高速旋转,其滚转频率远大于二圆运动频率。修正组件在无控状态下的稳定转速约为30 r/s,远大于两频率值;有控状态下,理想状态时修正组件相对地面稳定在某一控制角度,转速为0.控制算法的不同对修正组件的转速要求也不同,在修正组件减旋期间会经过共振区。因此,需要对控制算法和组件执行机构提出了更高的要求。
3 案例分析与仿真
安装二维弹道修正引信的旋转稳定榴弹的稳定性分析包括陀螺稳定性分析、动态稳定性分析、追随稳定性分析、共振稳定性分析等。在理想状态下,弹丸满足共振稳定性,然而在修正引信的制动控制中该问题必须被考虑。弹丸的追随稳定性是指弹轴追随质心的合速度方向,在弹丸落地时实现弹丸头部着地。陀螺稳定性是榴弹稳定的必要不充分条件。在弹丸动态稳定性分析过程中,陀螺稳定因子是该过程必不可少的因素。动态稳定性是弹丸飞行稳定的充要条件,满足动态稳定性条件的弹丸必定飞行稳定。下文重点讨论舵结构参数与初始扰动差异对安装二维弹道修正引信的弹丸的动态稳定的影响。
仿真中所选用的气象条件为标准气象条件,弹丸初速为890 m/s,射角为40°,仿真所得落点如表1所示。

表1 不同舵结构参数的弹丸仿真落点坐标
3.1 无控状态下舵结构参数对稳定性的影响
无控状态下,弹丸的动态稳定条件如下:
(17)
舵结构参数对弹丸的射程、侧偏、动力平衡角、舵转速、弹体转速、质心合速度等都有影响。由式(17)可知,上述因素对弹丸的稳定性存在不同程度的影响,因而,很难定量分析舵结构参数对弹丸稳定性的影响。
通过仿真的手段分析舵结构参数对弹丸稳定性的影响,给出不同舵结构参数的弹丸的陀螺稳定因子Sg和Sdd随时间的变化曲线,如图6、7所示。其中4°和6°是指在发射之前将同向控制舵预先调至该角度。
图6中,不同舵结构参数的弹丸的Sg的曲线均呈现先增大后减小的趋势,且Sg沿全弹道均大于1,说明弹丸均满足陀螺稳定条件。弹道升弧段,陀螺稳定因子由大到小依次为4°大舵片、6°大舵片、6°小舵片、4°小舵片;弹道降弧段,陀螺稳定因子由大到小依次为4°小舵片、6°小舵片、4°大舵片、6°大舵片。
图7中,不同舵结构参数的弹丸的Sdd曲线具有相同的变化趋势,且其值沿全弹道均大于0,说明弹丸满足动态稳定条件。弹道起始段(0~7 s),4种结构舵片稳定性很接近,之后(10~22 s)4°小舵片稳定性明显高于另外3种结构舵片,30~50 s动态稳定性由大到小依次为6°大舵片、4°大舵片、6°小舵片、4°小舵片,60 s之后,动态稳定性由大到小依次为4°小舵片、6°小舵片、4°大舵片、6°大舵片,整个过程中,4°大舵片和6°大舵片的动态稳定性都很接近。
3.2 有控状态下舵结构参数对稳定性的影响
有控条件下,弹丸的动态稳定条件如下:

(18)
与无控条件下的研究方法相同,采用仿真的手段研究舵结构参数对弹丸有控条件下弹丸的动态稳定性的影响,如图8、9所示。
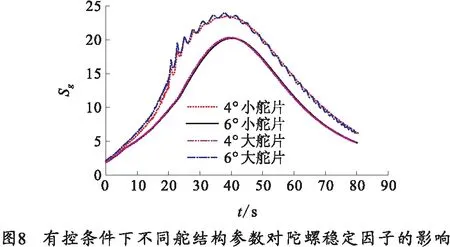

图8中,不同舵结构参数的弹丸的Sg的曲线均呈现先增大后减小的趋势,且Sg沿全弹道均大于1,说明弹丸均满足陀螺稳定条件。4°小舵片和6°大舵片陀螺稳定因子很接近,4°大舵片和6°小舵片很接近,且前两者明显大于后两者。
图9中,不同舵结构参数的弹丸的Sdd曲线具有相同的变化趋势,且其值沿全弹道均大于0,说明弹丸满足动态稳定条件。4°小舵片和6°大舵片动态稳定性很接近,4°大舵片和6°小舵片很接近,且前两者明显大于后两者。
4 结束语
笔者首先在理论上对弹道模型进行了稳定性分析,得到了满足陀螺稳定性、追随稳定性、动态稳定性与共振稳定性的要求。通过不同结构参数条件下舵对稳定性影响的仿真分析,可得出无控状态下结构参数对稳定性的影响较小,而在有控制状态下结构参数的改变对稳定性影响较大。
