基于模糊PID的双容水箱液位控制系统设计
2019-06-17纪亚芳张志刚
纪亚芳, 张志刚
山西师范大学物理与信息工程学院, 山西 临汾 041000
0 引言
液位控制是工农业生产及日常生活应用中最常用的控制参数,在不同的环境中对其要求的稳定性、快速性和鲁棒性有所不同,需要根据实际需求选取合理的控制方案来调节液体的流量以确保液位能保持在设定水平,但由于其具有大滞后、非线性、时变等特点,控制效果一直很难达到理想的效果.本文以双容水箱为研究对象,对液位控制系统进行分析研究,选用合理的控制策略使其能达到较为理想的效果.
1 双容水箱建模
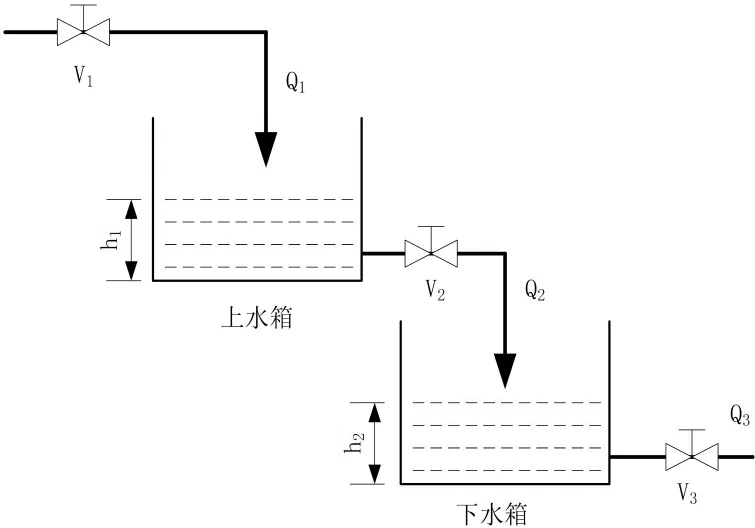
双容水箱系统结构图如图1所示,上水箱进水阀V1的开度控制上水箱流入量Q1,出水阀V2流出量为Q2,上水箱的液位h1由Q1和Q2来确定;下水箱进水阀V2流入量为Q2,出水阀V3流出量为Q3,下水箱的液位h2由进水量Q2和出水量Q3共同确定.在控制过程中V2、V3保持不变,系统主要控制任务是通过调节V1的开度来控制下水箱的液位h2,使其测量值与设定值相等.根据动态物料平衡关系列出下列方程:
ΔQ1=KuΔu
(1)
(2)
图1 双容水箱系统结构图
Fig.1 Structure diagram of double-capacity water tank
(3)
(4)
(5)
(2)式~(5)式中C1和C2分别为上水箱和下水箱的溶液系数,R1和R2分别为阀门V2和V3的液阻,将式(2)、(3)代入式(5),可得
(6)
由此可得
(7)
对式(7)求微分,得
(8)
将式(8)、式(2)、式(1)、式(3)、式(6)代入式(4)并整理,可得
(9)
令T1=C1R2为上容水箱的时间常数,T2=C2R3为下容水箱的时间常数,K=KuR3对为系统对象的放大倍数,对上式进行拉氏变换可得传递函数:
(10)
本系统管道较短,因此不考虑两个水箱之间管路产生的时间延迟,由传递函数可看出双容水箱为二阶系统,T1和T2的大小决定了系统反应的快慢,经试验计算出T1=30 s,T2=56 s,K=2.
2 双容水箱控制系统设计控制策略
传统控制理论中最常用的是常规PID控制,其算法简单实用,在控制中具有良好的控制效果和鲁棒性,但对液位控制这类具有大滞后、非线性、时变等特点的控制系统则需要对PID参数不断进行在线调整才能获得更好的控制效果.在实际应用中由于PID参数变化无常,没有确定的数学模型和规律可循,模糊
控制能充分利用操作人员进行实时非线性调节的成功实践操作经验[1],因此本文采用模糊控制器来进行PID参数在线整定,充分发挥PID控制器的优良控制作用使系统达到最佳效果.本系统中的模糊控制器由三个分模糊控制器组成,其原理图如图2所示.将输入PID调节器的偏差e和ec偏差变化率ec同时输入到各个模糊控制器中,通过对其进行模糊化、近似推理和清晰化处理后,把得到的修正量Δkp、Δki、Δkd输入到PID调节器中实现对三个参数的实时修正.

图2 模糊控制器修正PID参数原理图
Fig.2 The diagram of PID parameter modified by Fuzzy controller
模糊控制算法的核心就是设计模糊控制器,在设计模糊控制器的过程中,确定模糊控制器的结构和建立模糊规则并选定近似推理算法是两个核心工作,与之配套的是设计模糊化模块、选择模糊子集的隶属函数、设计清晰化模块并选择清晰化方法.模糊控制器的结构确定为二维FC,其中输入变量为误差e和误差变化率ec=de/dt,这种结构能反映受控过程中输出变量的动态特性,控制效果良好,下面主要介绍模糊控制器的三个主要组成部分:模糊化(D/F)模块,模糊控制规则模块和清晰化(F/D)模块.
2.1 模糊化模块
模糊控制器处理的数据都是模糊集合,而通常经过采样得到的输入量是清晰值,因此首先需要对输入模糊控制器的清晰量进行模糊化处理.输入值经过量化因子处理即进行一次比例变换后映射成模糊论域上的某个实数值,而这个实数值可能同时与论域上的几个模糊子集有关,求出这个实数值隶属于各个相关模糊子集的隶属度则称为把清晰化模糊化,因此模糊化模块的主要工作确定清晰量的量化因子及隶属函数.该系统中设置系统e的物理论域为[-20,+20],ec的论域为[-5,+5],对应的模糊论域都为E=[-3,+3],分别对应着七个模糊子集,即NB(负大)、NM(负中)、ZO(零)、PS(正小)、PM(正中)、PB(正大),则计算误差及误差变化率的量化因子如下式(11)、式(12)所示.
(11)
(12)
在该双容水箱控制系统中,将实际误差和误差率映射后求出该实数值隶属于各个相关模糊子集的隶属度,即可转化为相应的模糊量,完成与模糊集合的匹配.确定模糊子集实际上就是要确定模糊自己的隶属函数,常用的隶属函数有三角形、梯形、钟型、高斯型和Sigmoid型.本系统的模糊子集有七个,根据实际情况和工作经验这七个模糊子集的隶属度函数均选择为三角函数,该函数应用比较简单,能够覆盖整个论域,经过测试比较合适.
2.2 模糊控制规则模块
根据积累的人工经验或测试数据建立模糊控制规则是模糊控制的核心,是设计控制系统的主要内容[2].本系统的模糊控制器是三个双输入单输出的控制系统,每个控制器的模糊推理系统采用0阶T-S型模糊推理,根据操作人员对系统进行控制的实际操作经验和知识归纳总结出来的,其控制规则为49条,每一条控制规则代表某种特定情况下的相应对策,它由模糊条件语句“ifEandECthenΔkp”来描述,Δkp的控制规则描述语句如下所示.
ifEis NB and EC is PB thenΔkpis ZO;
ifEis NB and EC is PM thenΔkpis PS;
ifEis NB and EC is PS thenΔkpis PS;
……
ifEis PB and EC is NM thenΔkpis NS;
ifEis PB and EC is NB thenΔkpis ZO.
由于篇幅原因上面只列出了部分规则,用图表方式表示如表1所示.
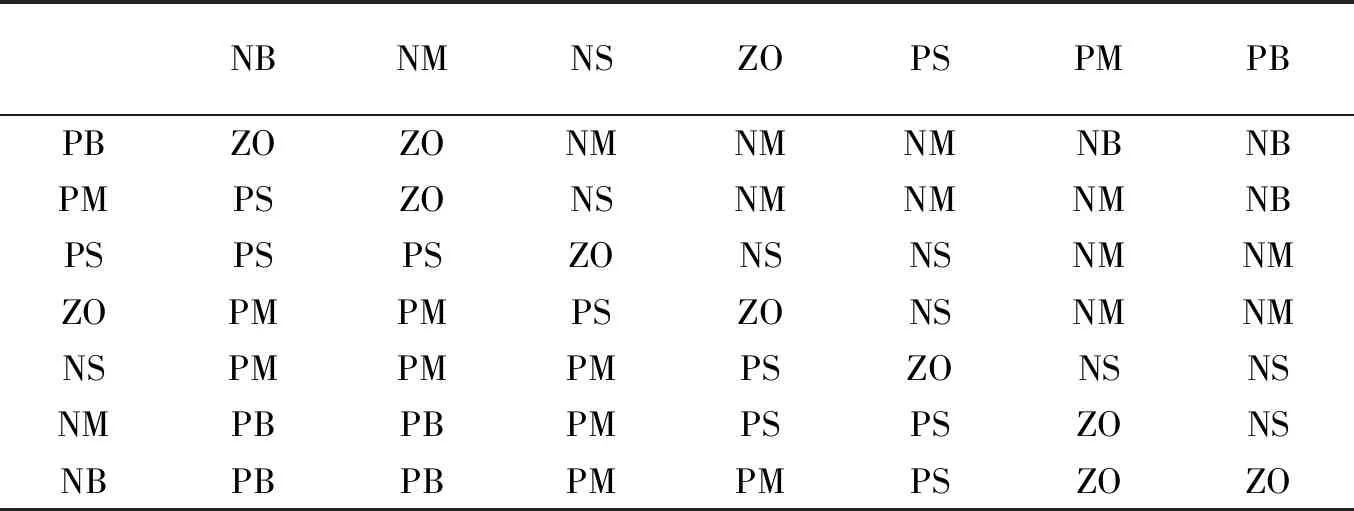
表1 Δkp控制规则表Tab.1 Fuzzy control rules of Δkp
表1显示每条规则都包含一个蕴含关系Ri,这49条规则蕴含关系的并就构成了系统总模糊关系R=R1∪R2∪…∪R48∪R49.根据模糊逻辑推理及合成法则可得输出的模糊量Δkp=X∘R=(X∘R1)∪(X∘R2)∪…∪(X∘Rn-1)∪(X∘Rn)∪.Δki、Δkd的控制规则与其类似,本文不再赘述.
2.3 清晰化模块
经过模糊控制规则模块得到的是由多条规则所得到的相应结论的模糊集合,隶属函数也是分段且不规则的形状,无法推动后面的执行机构,必须经过处理等效为清晰值,即映射到一个代表性的数值上,这个过程叫清晰化或反模糊化.常用的清晰化方法有面积重心法、面积平分法、最大隶属度法等,本文采用最大隶属度平均法,在模糊集合论域中取最大隶属度值的多个点平均值的横坐标来作为其相应的清晰值,由此可得到三个相应的PID修正参数清晰值Δkp、Δki、Δkd,从而对系统进行参数修正.
3 MATLAB仿真
Matlab软件的GUI包括了模糊推理系统编辑器、隶属函数编辑器和模糊规则编辑器三个重要的联动编辑器,是进行模糊系统仿真的重要工具.在Simulink中设计双容水箱控制系统仿真模型,选取合理的PID参数,对模糊控制器的各个编辑器进行编辑,选用Mamdani型模糊推理,维数为双输入单输出,根据近似推理和清晰化方法等编辑模糊推理系统编辑器,在隶属函数编辑器中编辑变量论域、隶属函数曲线、子集位置等相应内容,将49条模糊控制规则写入模糊控制规则编辑器,最终得到数据输出的清晰值实现对PID参数的在线整定,仿真结果如图3所示,图中表明模糊PID控制使系统的动静态特性良好.
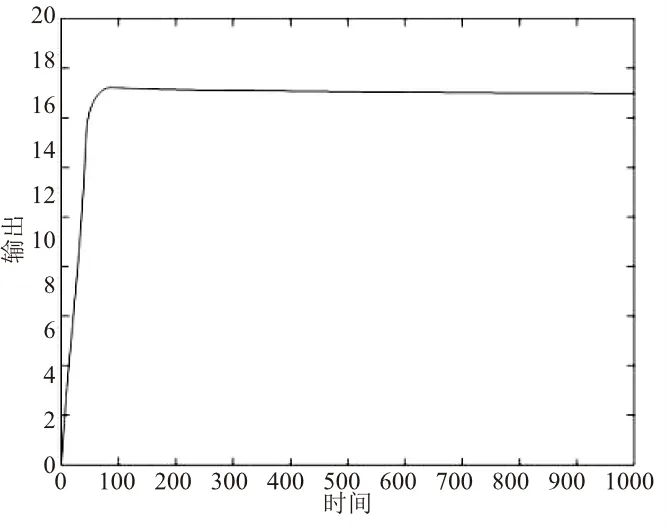
图3 模糊PID控制响应曲线
Fig.3 The response curves of the fuzzy PID control
