中低速磁浮轨道交通信号系统方案选择刍议
2019-06-17周晓明宗斌朱亨国许锦涛
周晓明、宗斌、朱亨国、许锦涛
(1、2 湖南磁浮交通发展股份有限公司 1 教授级高级工程师 2 工程师 长沙 湖南 410000)(3、4 株洲中车时代电气股份有限公司 3 高级工程师 4 工程师 株洲 湖南 412000)
中低速磁浮轨道交通作为一种新兴的轨道交通方式,由于相对传统轨道交通具有独特的优势,已被纳入公共交通运输体系之中。长沙磁浮快线工程作为国内首条具有完全自主知识产权的中低速磁浮轨道交通系统,成功投入运营以来,得到社会的持续关注。为更好地服务中低速磁浮轨道交通建设,本文就中低速磁浮轨道交通信号系统方案的选择做一初步的探讨。
1 总体需求特点
与高速铁路解决城市之间的快速运输需求、地铁轻轨解决城市内部居民日常出行需求相对应,中低速磁浮轨道交通一般被作为一种中运量的城市轨道交通或市域轨道交通的交通方式。
城市轨道交通和市域轨道交通在系统运能、敷设形式、运营组织等方面都存在不同,最主要的差异体现在车辆旅行速度和车站间距上。城市轨道交通服务于市区内部中长距离出行,车站间距相对较小,旅行速度一般小于40 km/h;而市域轨道交通由于服务于城市边缘地区与城市组团、郊区之间,为城乡居民提供通勤式交通服务,一般线路较长,因此车站间距较长,旅行速度较高,一般大于50 km/h。
表1是关于城市轨道交通与市域轨道交通的有关情况对比统计。

表1 城市轨道交通与市域轨道交通对比统计
中低速磁浮轨道交通的工程特点主要体现在以下几方面:
1)环保舒适:运行平稳、舒适、噪音低。线路两侧10 m 以外的峰值噪声为64 dB,低于常规地铁A、B型车的80~85 dB。
2)线路自由度大:采用非粘着驱动方式,不受粘着系数限制,摆脱车轮与钢轨摩擦力制约,爬坡能力强,线路坡度≤70‰,高于常规地铁A、B 型车的30‰;采用直线电机直接驱动方式,转弯半径小,最小曲线半径R=50m,小于常规地铁A、B 型车的R=300 m。
3)安全系数高:采用“F”轨,列车抱轨运行,无脱轨危险;制动采用三层制动:电制动、机械制动、紧急情况落车制动。
4)中运量:车长12~15 m,宽2.6~3.0 m,定员100~150 人,3 辆编组列车载客量可达450 人左右,最高运行速度为100 Km/h~160 km/h,运输能力为1.0~3.0万人次/h。
4)线路形式多采用地面和高架形式。
鉴于上述城市轨道交通与市域轨道交通的运营需求和中低速磁浮的工程特点,日本在2005年建成名古屋市区通向爱知世博会的磁悬浮线路,全长约9 km,最高时速100 km。韩国于2013年建成仁川机场磁悬浮线,全长6.1 km,最高时速80 km。我国也在2016年5月6日开通运营了长沙高铁站至长沙机场站的首条具有完全自主知识产权的常导中低速磁浮快线,全长18.55 km,最高时速100 km。2017 年12 月30 日,连接北京城区和门头沟区的北京S1 磁浮线(石厂站——金安桥站区间)正式开通试运营,里程约8.9 km,设计最高时速100 km。
由此可见,中低速磁浮轨道交通可用于城市轨道交通线路,或者市域轨道交通线路,也可以用作城市与市域相结合的混合型线路。
2 中低速磁浮轨道交通信号系统说明
针对城市轨道交通和市域轨道交通的工程特点和运营需求,信号系统需从结构方案等方面给予响应。
一般说来,磁浮信号系统的功能与普通轮轨交通类似。为简化问题,本文先就满足常规信号系统功能(具备常规的自动调度,自动驾驶,自动安全防护等功能)的GoA2 自动化等级的信号系统进行分析。
GoA2 自动化等级的系统结构与传统轮轨交通基本一致,均由列车自动监督系统ATS、列车自动驾驶系统ATO、列车自动防护系统ATP、计算机联锁CI等子系统构成。如下图所示:
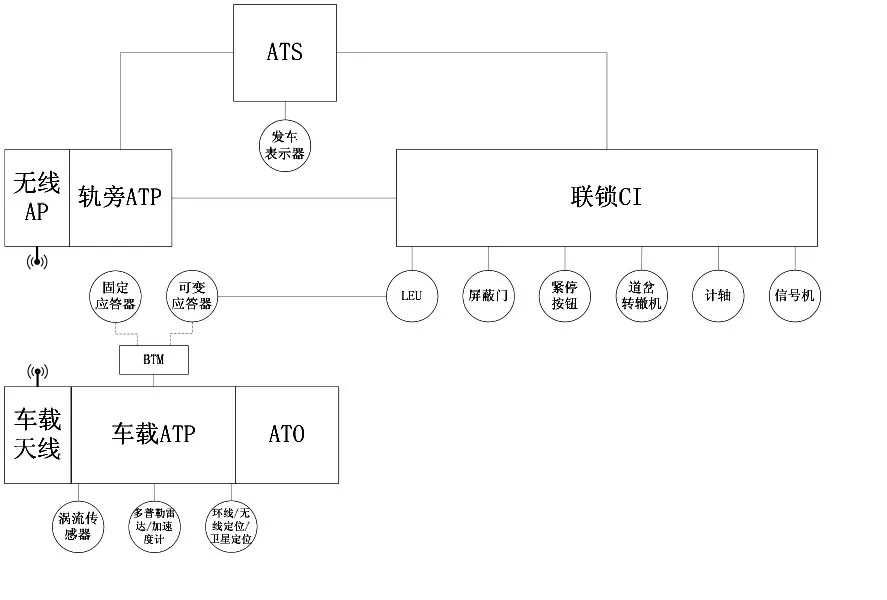
图1 GoA2自动化等级的系统结构示意图
考虑到磁浮车辆是悬浮在轨道上的,与传统的轮轨关系有所不同,所以磁浮的信号系统也与传统轮轨交通信号系统存在一定的差别,具体表现在测速测距以及定位、轨道占用检测、以及相关的道岔控制系统、车辆牵引制动系统等。表2 为传统轮轨轨道交通与中低速磁浮轨道交通对比情况。
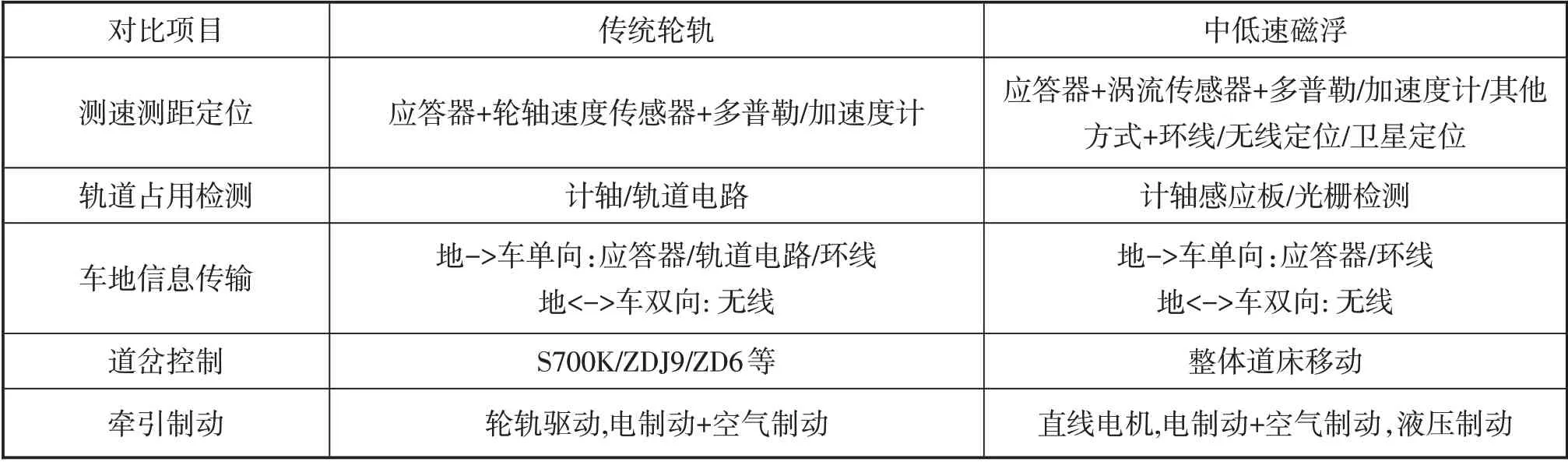
表1 传统轮轨轨道交通与中低速磁浮轨道交通对比
由于磁浮轨道交通与传统轮轨的差异,使用轨道电路的信号系统不能直接使用,无法兼容既有干线铁路信号系统。
3 磁浮常见信号方案介绍
虽然在系统结构上存在一些差异,但是中低速磁浮信号的信号方案和闭塞原理与普通轮轨交通信号系统并无明显的不同。
从ATP 控制方式来分,中低速磁浮主流信号系统主要分为点式控制和基于无线通信的连续式控制,前者主要采用固定闭塞或者准移动闭塞,后者通常采用移动闭塞辅以后备的固定闭塞。考虑到实际工程的特点,也有采取以点式控制为主,在站台及道岔等区域提供无线覆盖和相应防护的点连式控制方式。下文逐一介绍点式控制方式、点连式控制方式及CBTC控制方式方案。
3.1 点式控制方式 点式控制方式是通过可变数据应答器向列车发送移动授权报文的方式建立地-车单向通信,实现点式列车控制。点式控制方式又可细分为:填充应答器方式,ETCS1 级及其类似方式。
3.1.1 点式(填充应答器方式)控制 是指根据轨旁物理占用检测设备和信号机状态,通过信号机前方有源应答器向车载ATP 发送移动授权,该移动授权覆盖下一个闭塞分区范围,为避免列车降速,同时最大限度地缩小追踪间隔,在信号机的主应答器前相应位置增加填充应答器,提前预告前方状态。列车经过可变数据应答器,根据当前信号机显示(进路设定),它将得到一个移动授权。根据线路数据库信息(坡度,静态速度曲线),列车完全地监督它接收到的移动授权。通过在制动距离前布置填充应答器,列车可获得前方信号机显示的预告,避免减速。如果信号机显示“前进”,则列车获得一个直到下一个信号机的移动授权。列车司机将会驾驶列车前行,并按照ATP 推荐速度曲线的指示在信号机前停车。如果信号机显示状态变为“前进”,则列车可以通过下一个可变数据应答器获得新的移动授权。
联锁系统将信号机的显示以报文形式通过LEU发送到可变应答器。表3为点式控制方式下应答器传输信息情况。

表3 点式控制方式下应答器传输信息
该方案的优点是,结构简单,在点式情况下可以最大限度地发挥追踪能力,地铁后备系统大多采用此种方案。缺点是,较为适合80 Km/h 以下的城市轨道交通,对于速度等级较高的市域铁路,需要调整填充应答器位置和调整区段长度。
3.1.2 ETCS1级及其类似方式
1)ETCS1级点式控制方式
主要采用计轴设备来实现轨道区段占用、检测功能。
列车按照点式方式行车,通过有源应答器向列车发送移动授权,实现点式ATP 系统的超速防护。表4为ETCS1级点式控制下应答器传输信息情况。
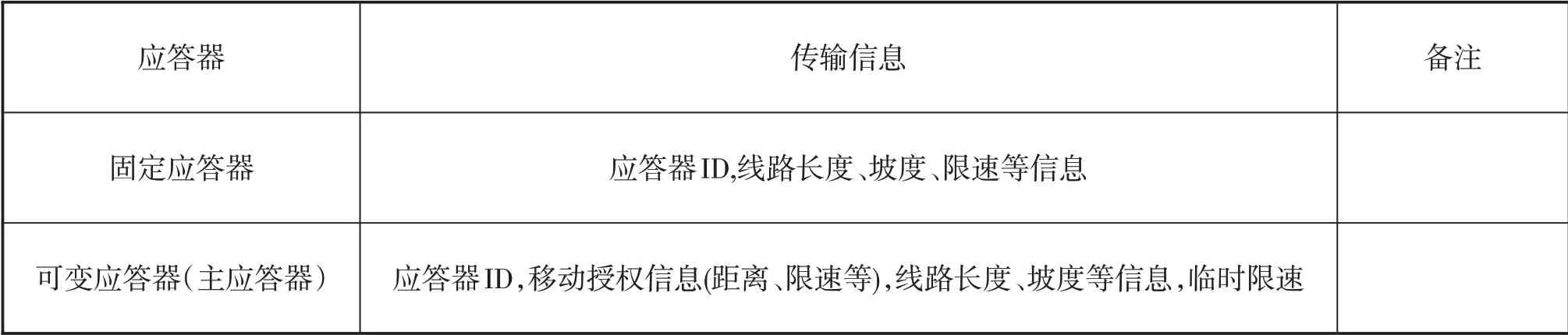
表4 ETCS1级点式控制下应答器传输信息
ETCS1级方案可以较好地适应较高速度列车的运行,方案成熟完整,有较多的应用案例(如京津线,温州S1 线),同样可以较好地满足追踪能力的需求。此外一个突出的优点是车载不需要存储线路数据,这使得新车的投入运行或者列车跨线延伸运行变得简单,因此只需要将地面设置完成即可,列车整备的工作较少或者没有。缺点是,方案较为复杂,应答器传输的数据较多,布置的应答器的数量也较多。
2)ETCS1级点式控制类似方式
作为折中,一种ETCS1 级方案的变形也是可以考虑的,即可变应答器仅传输应答器ID和前方区间空闲数以及行进路径,车载设备存放线路数据信息。此种方案兼顾了填充应答器方式的简单和ETCS1级的速度适应性,但是方案尚未有较多实践,需要在进一步在实践中验证成熟。
当前长沙磁浮区间采用点式填充应答器方式,最高时速可达100 km/h。若同样采用点式填充应答器方式,而最高时速要升至160 km/h,则需要信号在以下几个方面进行改进:
1)ATS 方面。为满足160 km/h 制动距离,根据制动距离要求和运营要求(如满足进站、出站需求),可将多条进路组合成进路组,进行捆绑触发;考虑列车的追踪运行,进路组中进路按照由近及远的顺序进行触发;进路组触发区段的设置,需按照联锁调整后的接近区段配置;
2)可变应答器方面。除现有信号灯信息和临时限速之外,增加一个预告前方已排好进路空闲区间数以及前方进路号(表明进路方向)信息,视速度等级,最多可增加4~5个空闲区间。
3)联锁方面。为满足提速要求和高低速列车追踪运行,通过增加信号机显示来实现不同速度授权的控制(如铁路中LLUUH四显示自动闭塞),对应的可变应答器填充应答器根据不同的信号机显示实时变更速度码,满足低速追踪、高速通过灵活的运营需求;提速后制动距离将延长,对应信号机的接近区段、总人解延时时间需延长;由于速度提升,延时长度会比较大,为避免对运营转线的影响,建议在有转线道岔处设置通信环境,在有通信的情况下,车载可发送停车保证信息给联锁,实现及时解锁。
4)车载ATP 方面。增加对空闲数和进路号的判断能力,根据这两个信息在车载数据库中找到相应的线路信息,并结合信号灯信息,还原成完整的移动授权。
3.1.3 结论 点式控制方式由于系统架构简单,区间设备少,后期维护小,工程造价低,适用于市域轨道交通初、近期中运量运营需求,性价比较高。远期客流上升,也可扩容升级至CBTC。
可以预计,随着无线通信技术的更趋成熟和成本的降低,无线以及相应的移动闭塞技术不再是一个难点。而无线技术所带来的高速通信的优势将能够很好地支撑无人驾驶等先进功能的应用。提供点式功能仅作为后备,以提升系统的可用性。
此外,随着技术进步,将来要更新ZC 数据和车载数据会越来越容易,而要更新应答器数据会相对比较困难。因此应答器中应主要考虑ID信息,可变应答器除ID 信息,仅考虑少量可变信息即可,线路长度坡度等信息不宜放到应答器中。
3.2 点连式控制方式 点连式控制方式是在正线局部区域(站台、道岔防护信号机防护外侧),通过专用双冗余的无线通道,实现车-地之间的双向无线通信。点连式控制在上述点式控制方式的基础上,在站台和道岔区域区域增加配置有无线覆盖,从而实现道岔防护,站台门防护,站台门车门联动功能,可以较好地弥补点式控制方式在安全防护和自动驾驶功能方面的不足。
目前这种方式因其较好的性能,适中的成本,已经在温州S1线和长沙磁浮快线得到应用。
3.3 CBTC控制方式 CBTC控制方式是基于无线通信的一个列车自动控制系统,具有高分辨的列车位置确定方式,连续的、大容量的车-地双向数据通信。CBTC 控制方式能提供全线路无线覆盖,可实现车地持续的双向高速数据传输,使得信号系统的控制能力得到极大的提升,被称为目前城市轨道交通的主流控制方式。
目前国内大多数城市轨道交通线路信号系统都可以实现基于移动闭塞的90 s 追踪间隔,和达到GoA2 等级的自动化驾驶,为满足城市轨道交通大运量高密度、起停频繁的列车运行提供良好的支持。
同时随着技术的进步,达到GoA3 等级或者GoA4 等级的全自动驾驶技术日益成为轨道交通趋势,信号跟踪和监控等系统将会高度集成,而CBTC控制方式正是全自动驾驶方案的一个重要支撑。
城市轨道交通CBTC 信号系统,之前主要采用WIFI 无线通信技术,为进一步提高技术性能(抗干扰能力、传输速度、支持较高速度等级的列车、支持综合承载等),依照中城协有关的标准,近年来已快速转向LTE-M无线通信技术。
之前因为WIFI 在列车运行时越区切换过于频繁,不能较好适应。在速度等级较高的市域轨道交通中,无法沿用。而可以满足较高速度等级的LTEM 无线通信技术的出现打破了这一困境,使得在市域交通中使用CBTC控制方式成为可能。LTE-M的出现使得CBTC控制方式可以同时满足城市轨道交通和市域轨道交通的需求,从而也使得全自动驾驶技术可以在城市和市域轨道交通中得以较好的实现。
CBTC 控制方式因其优越的控制性能和可升级到全自动驾驶,在城市轨道交通已成为主流的控制方式,而在市域轨道交通中也日益成为主要的发展方向。在成本允许的情况下,是中低速磁浮轨道交通的首选方案。
此种方式的缺点是,设备建设成本相对点式、点连式均较高。
出于进一步提高可用性的考虑,CBTC 控制方式通常会带有后备的点式控制方式,具体后备。
4 结束语
中低速磁浮主要用于城郊结合部的城市轨道交通和市域轨道交通,其信号系统可根据情况选择采用CBTC(LTE-M)或者点连式的信号系统方案。仅从性能考虑,CBTC 控制方式可作为主要的发展方向;同时其后备方式宜采用ETCS1 级或其类似方案,以兼顾城市轨道交通和市域轨道交通的需求。预计随着更加深入的研发和工程实践,通过对有关信号系统方案的深化应用,将会进一步完善和细化有关技术细节,使磁浮信号系统能够更好地为磁浮运输服务。